 19.5-星曈科技 STM32接收openmv数据-根据状态控制电机 超详细OpenMV与STM32单片机通信 OPENMV和STM32的识别追踪小车
19.5-星曈科技 STM32接收openmv数据-根据状态控制电机 超详细OpenMV与STM32单片机通信 OPENMV和STM32的识别追踪小车
功能介绍放开头, 使用便捷无需愁
这是全网最详细、性价比最高的STM32实战项目入门教程,通过合理的硬件设计和详细的视频笔记介绍,硬件使用STM32F103主控资料多方便学习,通过3万字笔记、12多个小时视频、20多章节代码手把手教会你如何开发和调试。让你更快掌握嵌入式系统开发。
V3.3.0-STM32智能小车
视频: https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click
V3:HAL库开发、功能:PID速度控制、PID循迹、PID跟随、遥控、避障、PID角度控制、视觉控制、电磁循迹、RTOS等功能。
19.5-STM32接收数据-根据状态控制电机
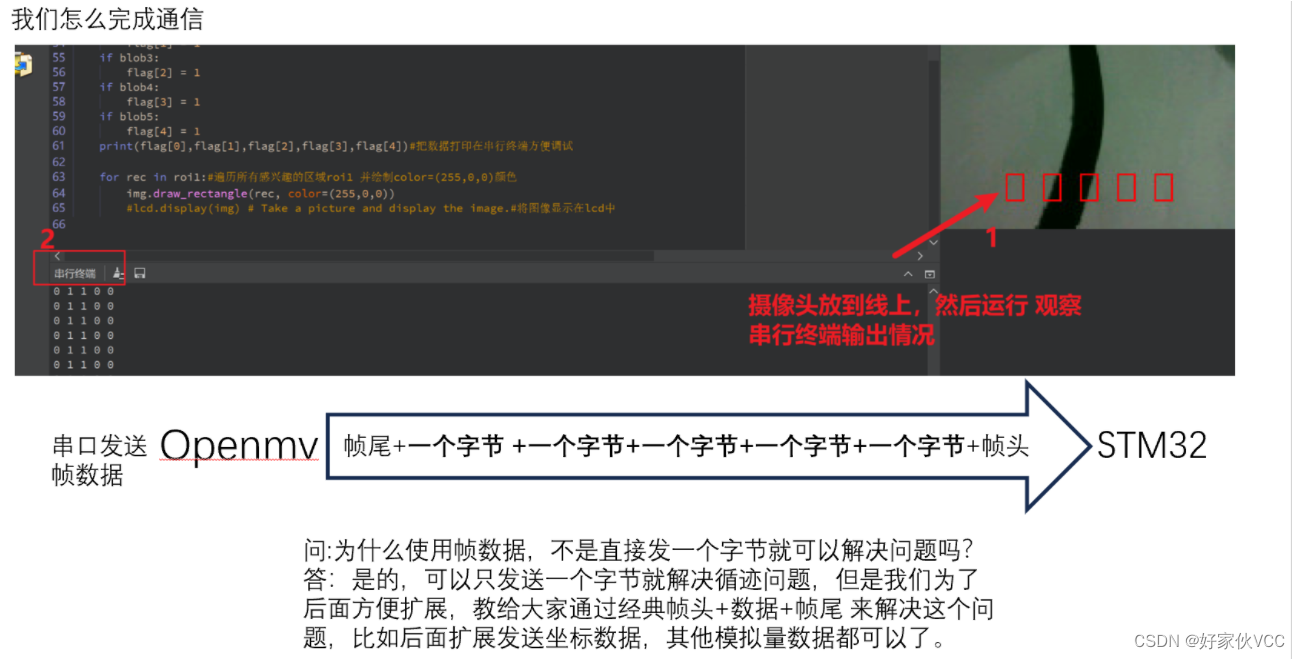
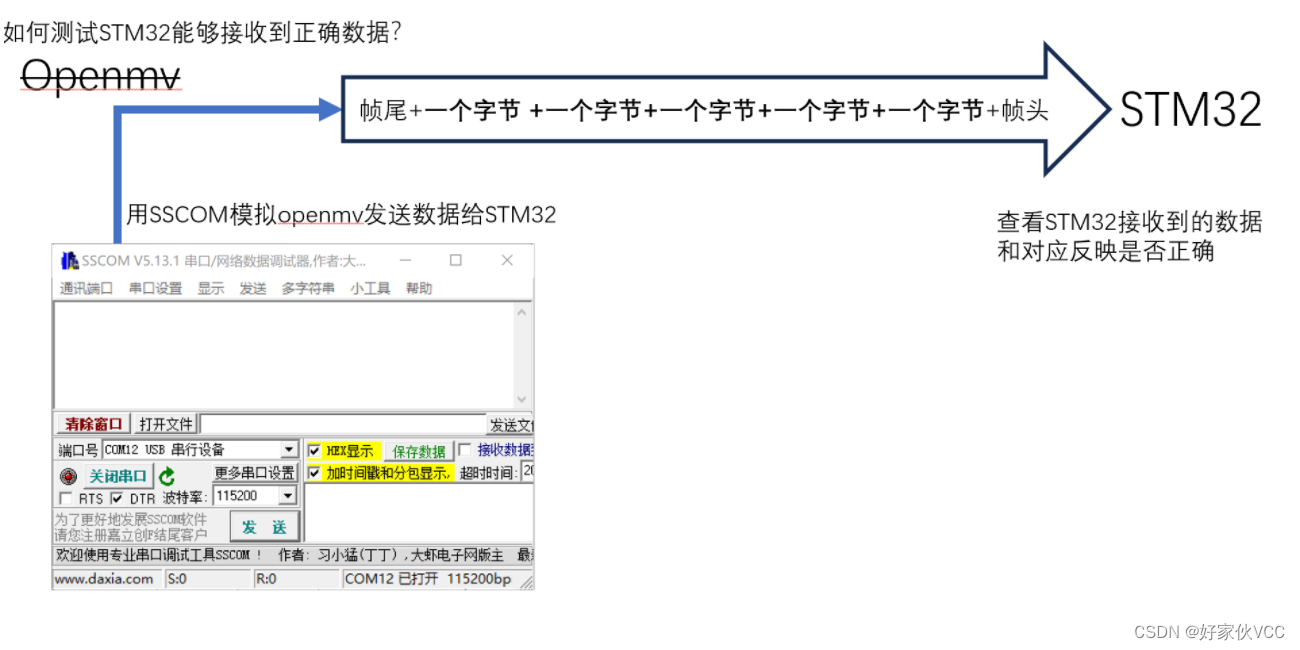
前面我们测试了openmv能够正确识别,正确发送数据、STM32能够正确接收、那么下面STM32单片机就要开始控制电机了。
这里控制电机其实和我们红外循迹PID基本一致。
需要注意的 因为我们的摄像头更加前瞻,距离车轮更远,所以电机同样的摆动幅度,摄像头摆动更大。
先分析一下之前的代码,然后明白我们要改什么了就
所以我们需要上面红色减蓝色 的部分
这里我们先定义一个结构体,这个是摄像头PID循迹,仿造那个红外对管的就可以。
tPid pidOpenmv_Tracking;//openmv摄像头的PID结构体类型变量

pidOpenmv_Tracking.actual_val=0.0;
pidOpenmv_Tracking.target_val=0.00;//摄像头PID 的目标值为0
pidOpenmv_Tracking.err=0.0;
pidOpenmv_Tracking.err_last=0.0;
pidOpenmv_Tracking.err_sum=0.0;
pidOpenmv_Tracking.Kp=-0.4;//摄像头循迹PID的K和d先调整的小一些
pidOpenmv_Tracking.Ki=0;
pidOpenmv_Tracking.Kd=0.10;

声明一下
extern tPid pidOpenmv_Tracking;//摄像头的PID

sprintf((char*)OledString, "lHW:%d ", g_lHW_State);//视觉识别结果
OLED_ShowString(0,0,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,
g_fHW_PID_Out = PID_realize(&pidOpenmv_Tracking,g_cThisState);//PID计算输出目标速度 这个速度,会和基础速度加减
g_fHW_PID_Out1 = 0.5 + g_fHW_PID_Out;//电机1速度=基础速度+循迹PID输出速度
g_fHW_PID_Out2 = 0.5 - g_fHW_PID_Out;//电机1速度=基础速度-循迹PID输出速度
if(g_fHW_PID_Out1 >1.2) g_fHW_PID_Out1 =1.2;//进行限幅 限幅速度在0-1.2之间
if(g_fHW_PID_Out1 < 0) g_fHW_PID_Out1 =0;
if(g_fHW_PID_Out2 >1.2) g_fHW_PID_Out2 =1.2;//进行限幅 限幅速度在0-1.2之间
if(g_fHW_PID_Out2 < 0) g_fHW_PID_Out2 =0;
if(g_cThisState != g_cLastState)//如何这次状态不等于上次状态、就进行改变目标速度和控制电机、在定时器中依旧定时控制电机
{
motorPidSetSpeed(g_fHW_PID_Out1,g_fHW_PID_Out2);//通过计算的速度控制电机
}
g_cLastState = g_cThisState;//保存上次红外对管状态

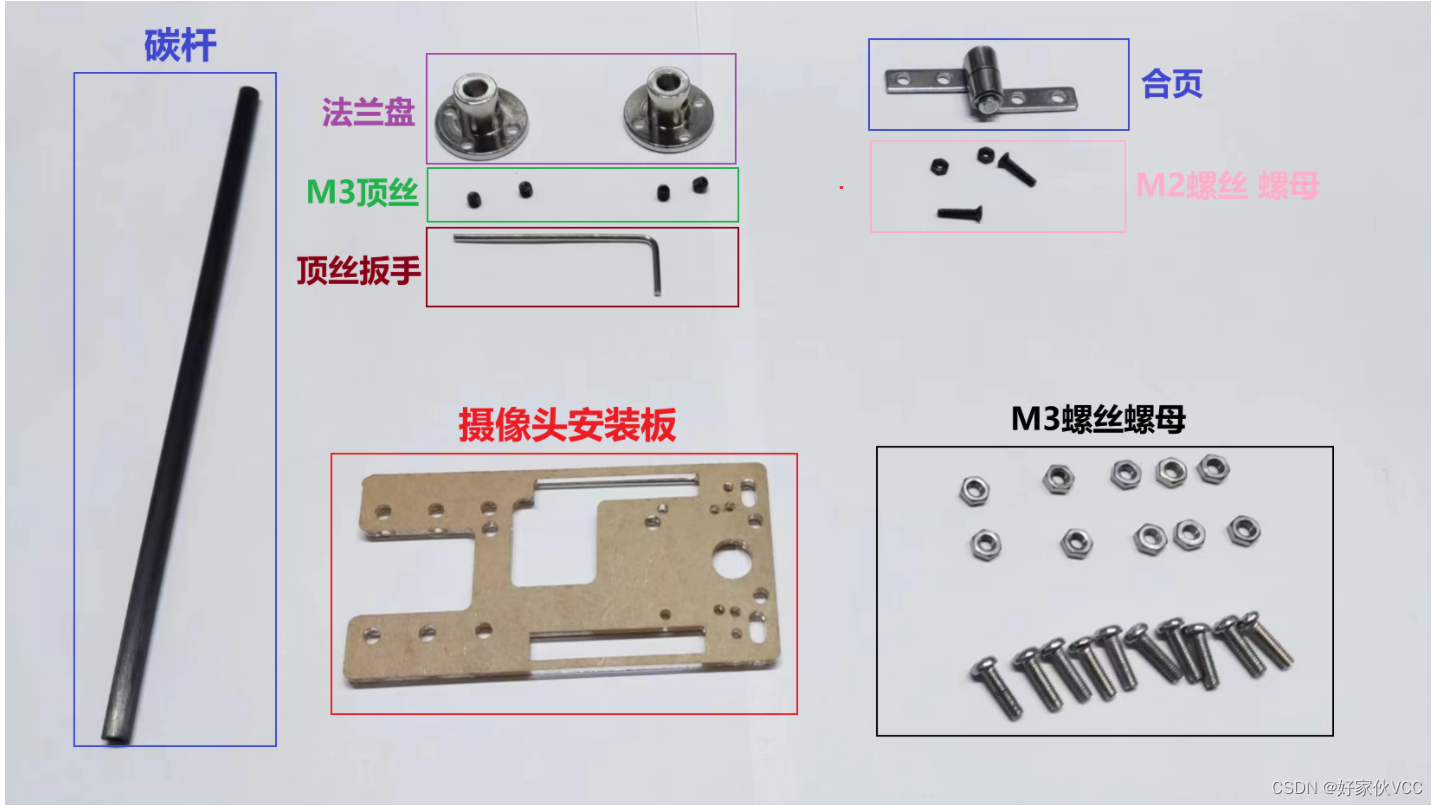
注意摄像头不能仰角太大
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
STM32
+关注
关注
2270文章
10895浏览量
355726 -
小车
+关注
关注
0文章
54浏览量
20929 -
单片机通信
+关注
关注
1文章
12浏览量
15388 -
控制电机
+关注
关注
0文章
240浏览量
18119 -
openMV
+关注
关注
3文章
39浏览量
9810
发布评论请先 登录
相关推荐
第19.1 章-星瞳科技 OpenMV视觉循迹功能 超详细OpenMV与STM32单片机通信
第19.1 章-[星瞳科技]OpenMV视觉循迹功能 超详细OpenMV与STM32
19.3-星曈科技 openmv Hopenmv发送五个uchar Openmv+STM32F103C8T6视觉巡线小车 STM32循迹小车系列教程
19.3-【星曈科技】openmv Hopenmv发送五个uchar Openmv+STM32F103C8T6视觉巡线小车
19.4-STM32接收数据-状态显示在屏幕 openMV寻迹与小车控制 Openmv+STM32F103C8T6视觉巡线小车
19.4-STM32接收数据-状态显示在屏幕 openMV寻迹与小车
OpenMv和STM32通信问题
问题,刚开始不知道哪里出了问题,一直通信失败,明明使用TTL串口接收OpenMv发送的数据是可以在串口调试助手上显示的,但就是无法发给Stm32
发表于 08-16 07:44
OpenMv与stm32简单串口通信
前言刚开始学openmv与32串口通信,我是用的stm32f103的板子。开始想简单发送字符或者16位数试验一下,然后就遇到了个小问题,即openmv和
发表于 12-16 16:56
•27次下载

【星曈科技】OpenMv笔记——利用OpenMV与STM32进行串口通信
利用OpenMV与STM32进行串口通信OpenMV端的程序# Untitled - By: dell - 周一 7月 19 2021# Blob Detection and uart
发表于 12-24 18:51
•27次下载
OpenMV识别色块并且与STM32串口通信
。因为视觉部分有两个任务,所以用单片机给STM32发送“1”,开始颜色识别,发送“2”,开始特征点识别。不发送则不识别。
发表于 12-24 19:03
•44次下载
STM32与openmv通信(HAL库)
最近需要用到openmv进行追踪物体,所以在此做个小结,其中这些文章给我很大的帮助,建议可以去看超详细OpenMV与
发表于 12-24 19:16
•23次下载
OpenMV与单片机串口通信交互
器件:OpenMVMM32单片机一、采用串口通信串口通信想必大家都知道,这里就不多赘述了,如果有不了解的可以看我的往期文章【STM32】HAL库 CubeMX例程三—串口中断
发表于 12-27 19:21
•20次下载
【DIY】基于OpenMV的STM32追球小车
简单识别程序设计【microPython】2)STM32控制程序设计 【C语言】①对OpenMV发送的数据包进行解析②
发表于 01-14 13:01
•39次下载
第19.2章-星曈科技 openmv H7 plus openmv视觉循迹功能-完成视觉识别指定区域 OpenMV视觉模块循迹 STM32F103C8T6视觉巡线
第19.2章-【星曈科技】openmv H7 plus openmv视觉循迹功能-完成视觉识别指定区域





 工商网监
工商网监
评论