 OrangePi AIpro应用:机械臂应用开发指南
OrangePi AIpro应用:机械臂应用开发指南
2024世界人工智能大会上,香橙派携OrangePi AIpro 20T在世博展览馆H1-A301展区亮相,给大家带来AI+互动的沉浸式体验。其中,搭载OrangePi AIpro开发板的智能机械臂吸引了众多与会者的驻足关注,他们对这款智能机械臂表现出极大的热情。此款机械臂能对积木颜色进行识别,将积木搬运到对应区域,可应用于垃圾分拣及工业、物流、医疗领域。那么今天,我们就给大家介绍如何通过OrangePi AIpro打造一款智能的机械臂。
1、需要准备的东西
1)Orange Pi Ai Pro开发板。
2)Orange Pi Ai Pro开发板配套的65W PD电源。

3)Orange Pi Ai Pro开发板配套的散热风扇。

4)32GB或32GB以上容量的TF卡。

5)用于烧录Ubuntu镜像到TF卡中的读卡器。

6)HDMI显示器和HDMI线。



8)一台Windows系统的笔记本或者电脑,烧录开发板的Ubuntu系统到TF卡中需要用到。
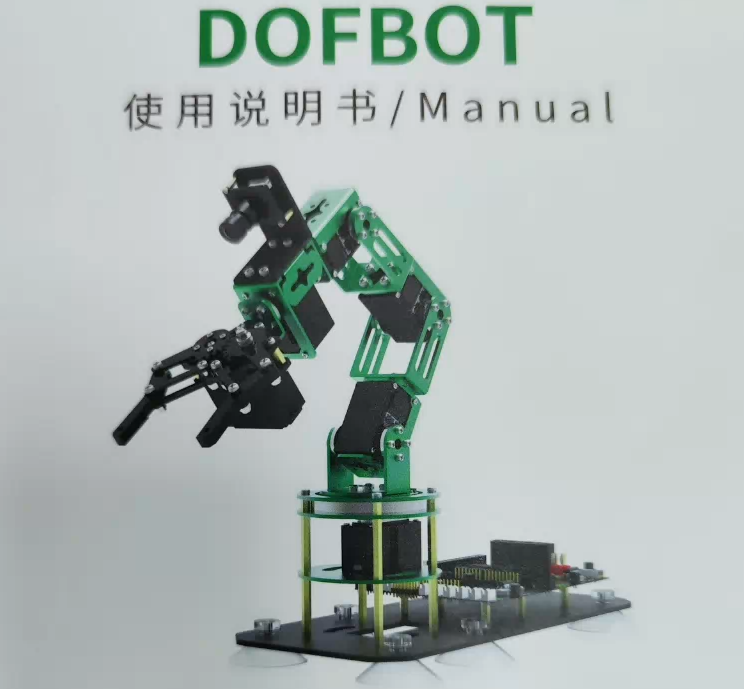
9)标准版本的亚博智能机械臂套件。

2、机械臂组装时的注意事项
1)亚博智能机械臂套件里面有一个使用说明书,机械臂的吸盘、扩展板、摄像头的安装参考这个说明书即可。
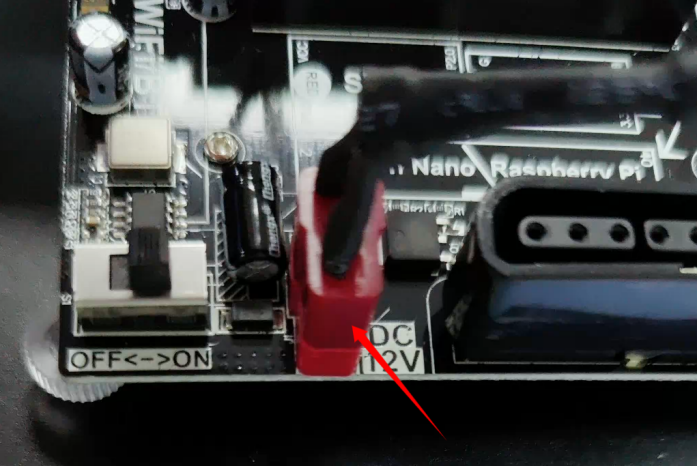
2)机械臂底板的电源线如下所示,此线的安装需要用较大的力气按压进去。
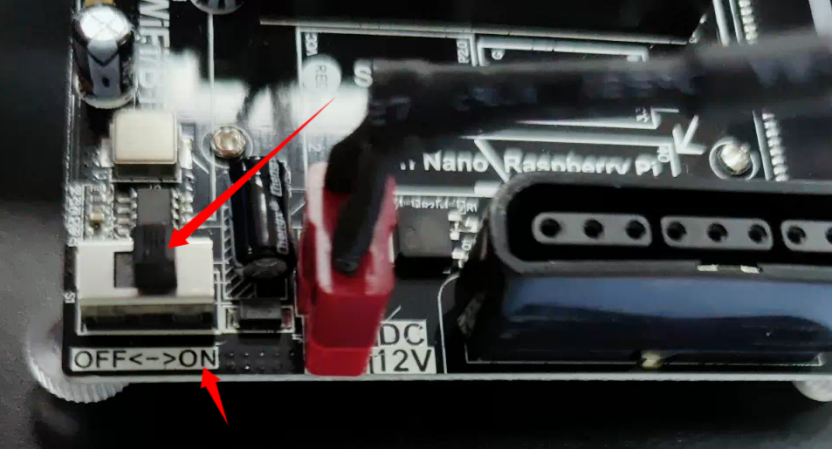
3)机械臂使用时记得把电源按键拨到ON档位。
4)将开发板固定到机械臂的底板上前,请先不要安装风扇,不然无法固定。
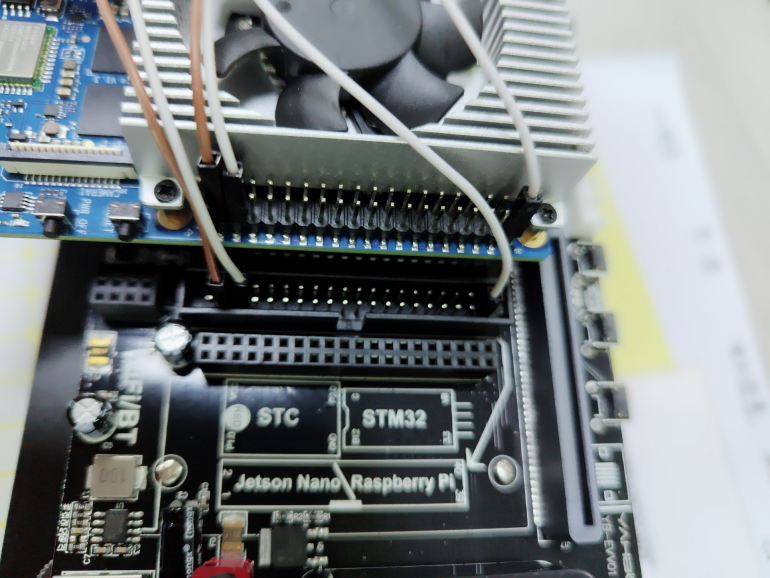
5)机械臂的套件中默认提供了下图所示的排线来连接开发板和机械臂底板的40pin接口(实际只使用了3个引脚)。由于开发板风扇的影响,此40pin排线无法插入开发板的40pin接口中。我们需要额外准备3根杜邦线来连接开发板和底板的引脚。

6)根杜邦线的连接开发板和机械臂底板的方法如下所示:
6.1开发板40pin的3号引脚接到底板40pin的3号引脚;
6.2开发板40pin的5号引脚接到底板40pin的5号引脚;
6.3开发板40pin的39号引脚接到底板40pin的39号引脚。
7)开发板固定在机械臂的底板上时,可以靠后一些,这样方便开发板接入HDMI显示器。
3、烧录系统并运行机械臂程序的方法
1)首先烧录已预装机械臂样例代码的Ubuntu镜像到TF卡中。烧录镜像的方法请参考《OrangePi_AI_Pro_昇腾_用户手册》中2.4.烧写Linux镜像到TF卡中的方法一小节的说明。已预装机械臂样例代码的Ubuntu镜像下载地址如下所示:
链接: https://pan.baidu.com/s/1CzjZUAxNtWlmW1OY-WRyNA?pwd=cejh
提取码: cejh
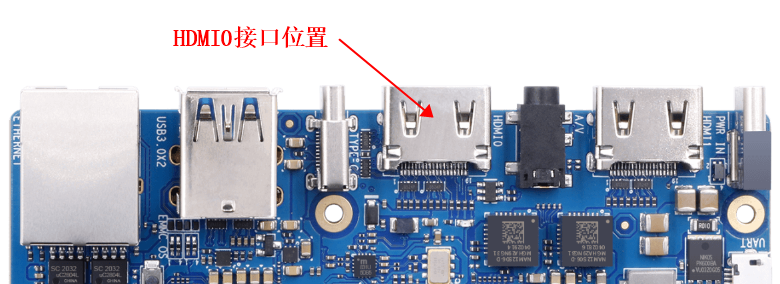
2)然后将开发板连接到HDMI显示器,并接上鼠标和键盘,这样我们就可以在HDMI显示器中来操作开发板的Ubuntu系统了。需要注意的是,目前只有HDMI0接口支持显示Ubuntu系统的桌面。
3)然后通过网线或者WIFI将开发板连接到能正常上网的网络中。网络的连接方法请参考《OrangePi_AI_Pro_昇腾_用户手册》中3.5.网络连接测试一小节的说明。
开发板Ubuntu系统登密码为Mind@123。
4)登录Ubuntu系统的桌面后,首先打开一个终端,然后使用sudo -i命令切换到root用户。
5)然后运行下面的命令,启动机械臂的分拣功能。
cd /root
./start_block_cls.sh
4、校准摄像头的方法
1)如果测试发现机械臂抓取积木不准,可以校准下摄像头。
2)首先通过HDMI显示登录Ubuntu系统的桌面。
3)然后打开一个终端,并使用sudo -i命令切换到root用户。
4)然后进入机械臂代码的目录。
cd /root/xunlong_arm
5)然后运行下面的命令打开校准程序。
jupyter notebook --allow-root --no-browser --ip 127.0.0.1
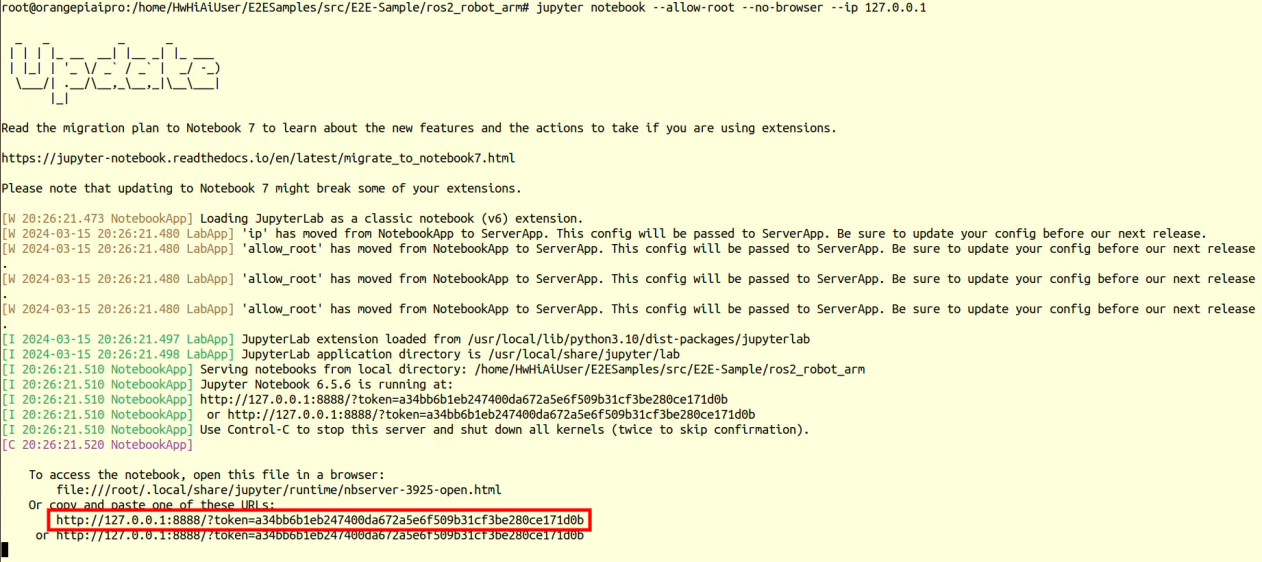
6)然后在开发板的Ubuntu系统中打开浏览器,输入上面红色框中的地址会显示下面的界面。
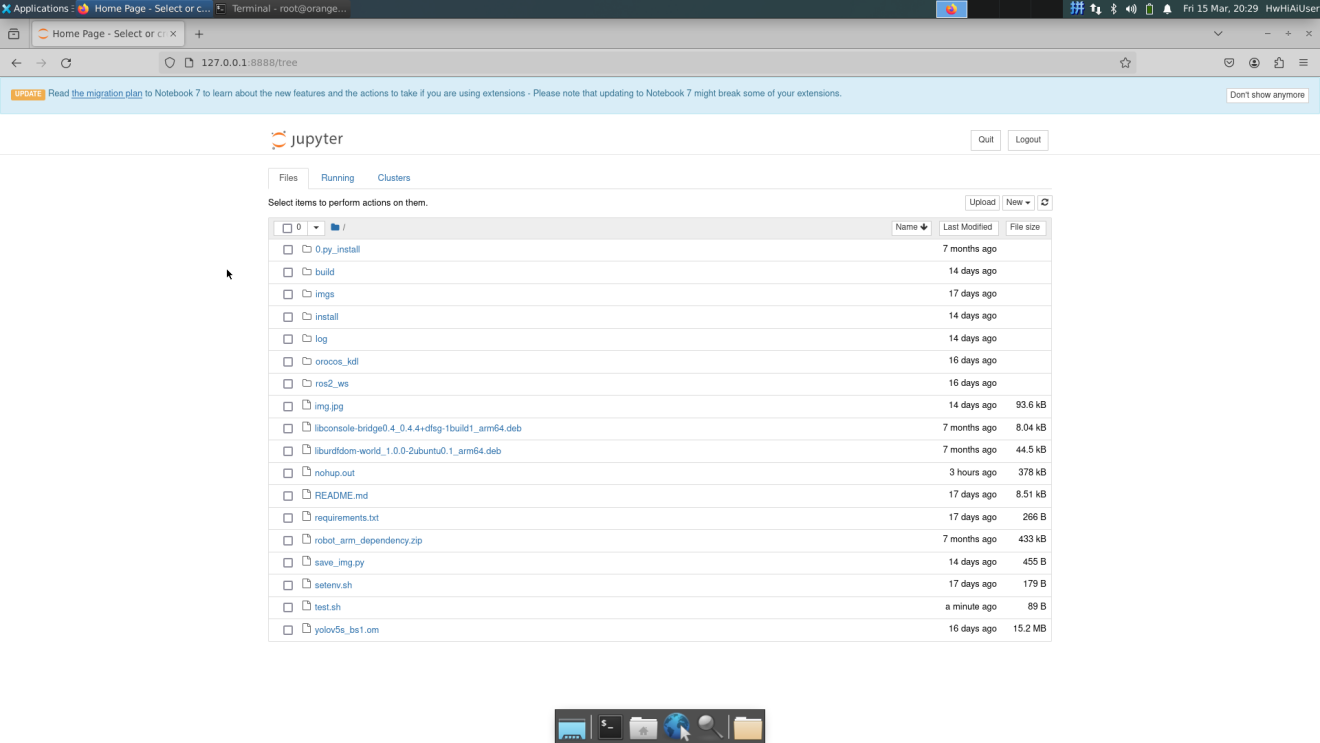
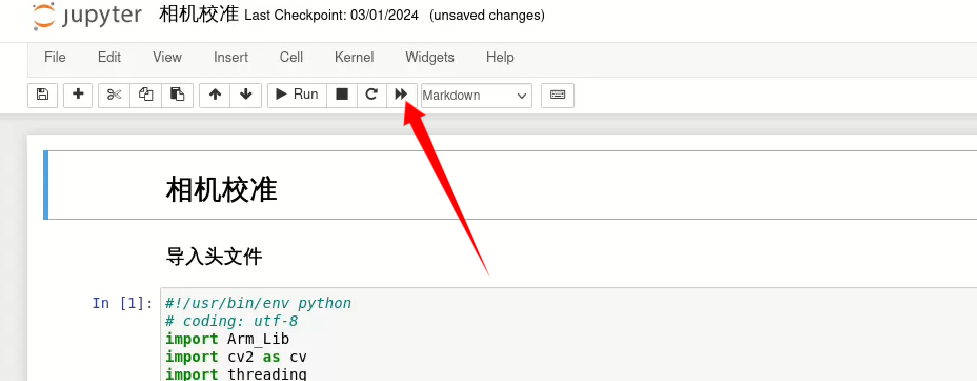
7)然后打开相机校准.ipynb

8)然后点击下面的图标开始运行
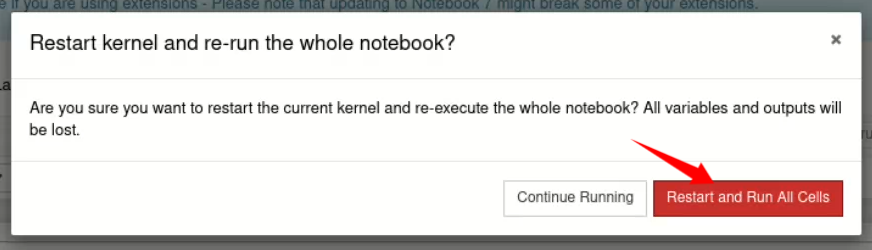
9)然后选择Restart and Run All Cells
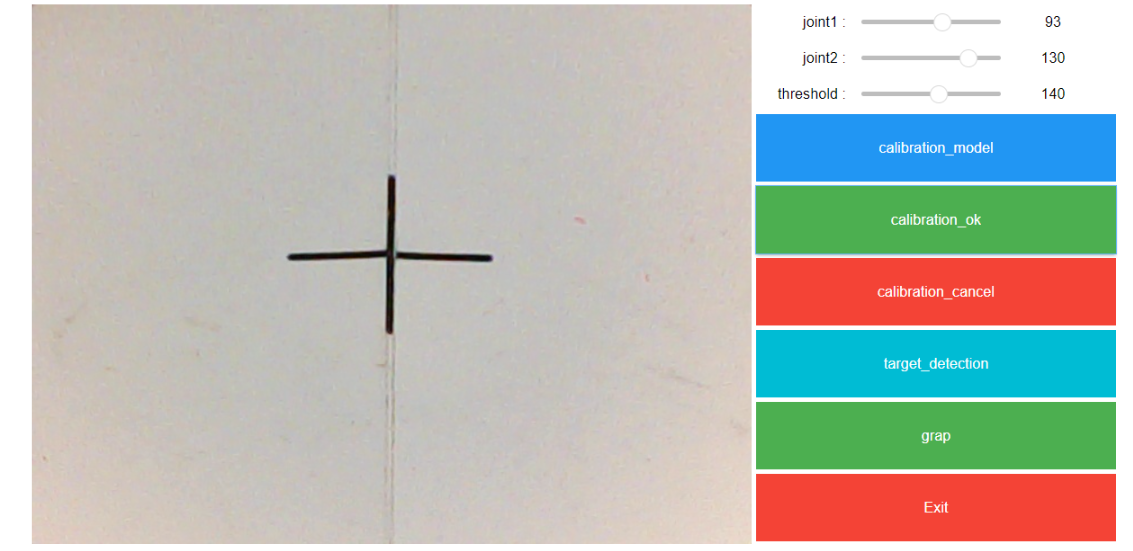
10)成功运行后的显示如下所示,会显示机械臂摄像头的图像。
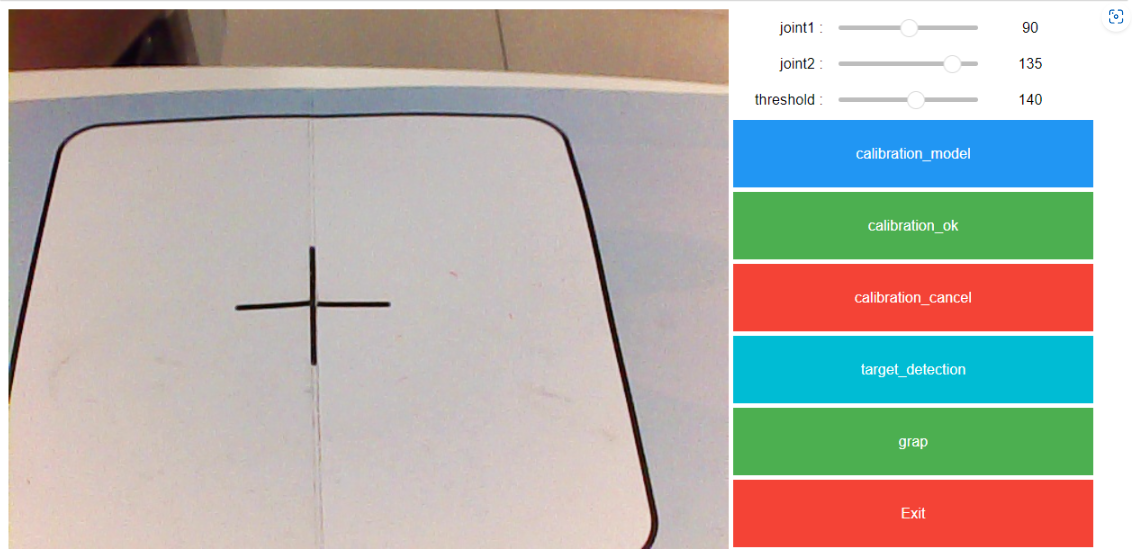
11)然后单击calibration_model按钮,并调节joint1与joint2。请保证调试环境的光源充足,确保蓝色边框覆盖整个十字框,画面如下所示。
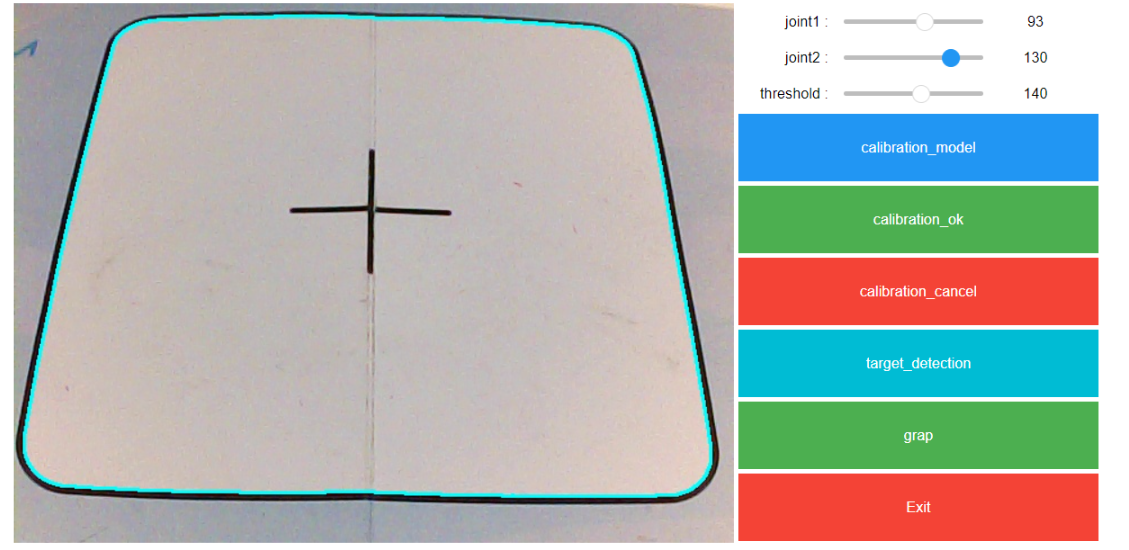
12)单击calibration_ok按钮,可视化界面进入方框内部,画面如下所示。
13)校准完后,返回终端,按下键盘Ctrl+C键,即可停止jupyter notebook程序。
14)然后再测试下机械臂抓取积木是否准确。
15)如果在完成相机校准后抓取积木仍有误差,此时就需要在程序中手工校准了。
a.首先打开配置文件offset.txt。
cd /root/xunlong_arm/
vim config/offset.txt
b.打开offset.txt后会看到两个参数。
0.016
0.01
c.如发现机械臂抓取略微靠积木的后方,则需要适当加大第一个参数。
d.如发现机械臂抓取略微靠积木的前方,则需要适当减小第一个参数。
e.如发现机械臂抓取略微靠积木的右方,则需要适当加大第二个参数。
f.如发现机械臂抓取略微靠积木的左方,则需要适当减小第二个参数。
g.修改参数后,需要重新运行程序来测试。
-
人工智能
+关注
关注
1796文章
47643浏览量
240000 -
开发板
+关注
关注
25文章
5121浏览量
98088 -
机械臂
+关注
关注
12文章
520浏览量
24706 -
orange pi
+关注
关注
0文章
30浏览量
2905
发布评论请先 登录
相关推荐

如何基于OrangePi AIpro开发AI推理应用





 工商网监
工商网监
评论