 串级控制pid参数怎么调节
串级控制pid参数怎么调节
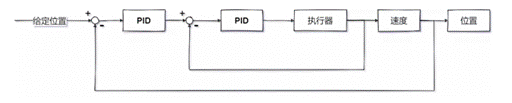
串级控制(Cascade Control)是一种先进的控制策略,广泛应用于工业自动化领域。它通过将一个控制系统分解为两个子控制系统,即主控制器和副控制器,实现对复杂过程的精确控制。在串级控制系统中,PID(比例-积分-微分)控制器是常用的控制算法。本文将介绍串级控制PID参数的调节方法。
1. 串级控制的基本原理
串级控制由两个控制器组成:主控制器和副控制器。主控制器负责设定整个系统的输出,而副控制器则负责调节主控制器的设定值,以实现对过程变量的精确控制。
2. PID控制器的基本概念
PID控制器是一种线性控制器,它根据误差信号(期望值与实际值之差)来计算控制量。PID控制器由三个部分组成:
- 比例(P) :根据误差的大小来调整控制量。
- 积分(I) :根据误差随时间的积累来调整控制量,以消除稳态误差。
- 微分(D) :根据误差的变化趋势来调整控制量,以提高系统的响应速度。
3. 串级控制PID参数调节的一般步骤
3.1 确定控制目标和性能指标
在调节PID参数之前,首先需要明确控制目标和性能指标,如超调量、上升时间、稳态误差等。
3.2 初步设定PID参数
在没有经验的情况下,可以采用以下经验公式进行初步设定:
- P:根据系统的响应速度,选择一个适中的比例增益。
- I:如果系统存在稳态误差,可以适当增加积分增益。
- D:如果系统需要快速响应,可以适当增加微分增益。
3.3 调整主控制器PID参数
主控制器的PID参数调整通常遵循以下步骤:
- 比例增益调整 :增大比例增益可以提高系统的响应速度,但过大的比例增益可能导致系统超调。
- 积分增益调整 :增大积分增益可以消除稳态误差,但过大的积分增益可能导致系统的稳定性下降。
- 微分增益调整 :增大微分增益可以提高系统的响应速度,但过大的微分增益可能导致系统的振荡。
3.4 调整副控制器PID参数
副控制器的PID参数调整通常遵循以下步骤:
- 比例增益调整 :副控制器的比例增益通常设置为主控制器的1/10到1/100。
- 积分增益调整 :副控制器的积分增益通常设置为主控制器的1/10到1/100。
- 微分增益调整 :副控制器的微分增益通常设置为主控制器的1/10到1/100。
3.5 参数优化
在初步设定和调整PID参数后,需要进行参数优化,以实现最佳的控制效果。优化方法包括:
- 试错法 :通过不断调整参数,观察系统响应,逐步找到最优参数。
- 响应曲线法 :通过绘制系统响应曲线,分析超调量、上升时间等性能指标,进行参数调整。
- 优化算法 :使用遗传算法、粒子群算法等优化算法,自动搜索最优参数。
4. 串级控制PID参数调节的注意事项
- 稳定性 :在调整PID参数时,要确保系统的稳定性,避免参数过大导致系统振荡。
- 超调量 :要控制超调量在可接受范围内,以保证系统的平稳运行。
- 响应速度 :根据实际需求,合理选择响应速度,避免过快或过慢。
- 稳态误差 :通过调整积分增益,消除或减小稳态误差。
- 参数整定 :在实际应用中,可能需要多次整定参数,以达到最佳控制效果。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制系统
+关注
关注
41文章
6666浏览量
110945 -
PID
+关注
关注
36文章
1473浏览量
85893 -
参数
+关注
关注
11文章
1862浏览量
32451 -
串级控制
+关注
关注
0文章
7浏览量
9234
发布评论请先 登录
相关推荐
X小四轴串级PID调节振荡
我将小四轴的两端用绳子固定在椅子上,调节俯仰内环PID,可是我仅调节内环P参数时,四轴一开始总是往前倒,总是后面两个电机的力度比前两个电机的力度大,加入D后可以在平衡位置维持一会,然后
发表于 05-07 06:36
基于串级PID控制技术的堆垛机控制器的设计
本文从提高堆垛机作业系统的工作效率和可靠性的角度出发,利用串级控制原理和积分分离的PID 算法,建立了堆垛机串
发表于 08-29 11:41
•14次下载





 工商网监
工商网监
评论