 EtherCAT 总线协议网关对接机器人配置的成功案例分享
EtherCAT 总线协议网关对接机器人配置的成功案例分享
连接机器人与网关的配置案例
1.背景介绍
随着计算机技术、智能技术的发展,中国机器人产业营业收入突破1000亿元。“十三五”期间,工业机器人产量从7.2万套增长到21.2万套,年均增长31%。工业机器人已在汽车、电子、冶金、轻工、石化、医药等52个行业大类、143个行业中类广泛应用。
机器人的广泛应用将进一步推动工业自动化的发展,并为企业带来更大的竞争优势。在智能制造不断发展前行中,很多场景下,客户对于设备任务、环境空间、维护成本的要求都越来越细致,机器人控制系统需要和PLC控制系统交互数据的应用也广泛展开。
本文介绍钡铼技术Modbus TCP转EtherCAT协议转换网关BL123,实现EtherCAT与MODBUS之间的协议互转,为您的工业自动化系统提供更多的灵活性和可扩展性。
2.定义
BL123是一款Modbus转EtherCAT网关,配备2个RS485串口、1个RS232串口和3个以太网口。该网关实现了Modbus协议到EtherCAT协议的转换,为不同协议设备的通信提供了简单可靠的解决方案。广泛适用于自动化生产线、工业设备监控等场景,帮助用户实现设备间数据交换和实时控制。BL123采用高性能处理器和稳定通信模块,确保数据传输的稳定性和可靠性。
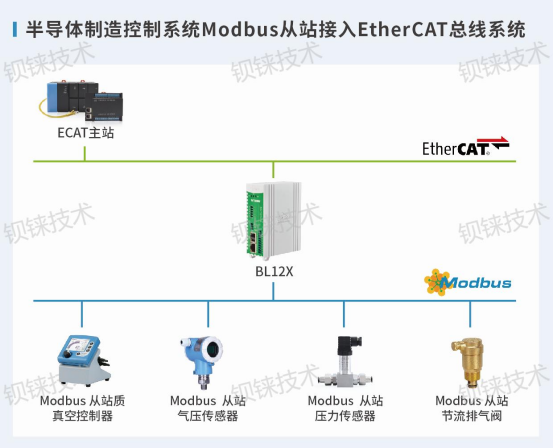
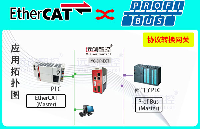
3.拓扑结构

4.网关技术参数
(1)ETHERCAT 技术参数:
●网关做为 ETHERCAT 网络的从站,可以连接倍福、欧姆龙、基恩士等厂家的 PLC。
●带3个 RJ45 以太网接口,10/100Mbps,自适应MDI/MDIX.
(2)MODBUS技术参数:
●网关的 MODBUS 接口有1*RS232、2*RS485。
●网关的 MODBUS 波特率支持:2400bps-115200bps
●网关作为 MODBUS 主站,支持 01、02、03、04、05、06、15、16。
网关作为 MODBUS 主站,能带 32 个 Modbus 从站
5. 网关优势
突破通信界限,数据并发,告别低速串口轮询,加速低速网络与实时网络的连接。我们的网关产品可以实现工业互联,使您的设备到连接实时网络。
简单配置,强大功能,一键实现设备互通。说再见繁琐的配置过程!我们的网关产品提供直观易用的上位机配置界面,让您轻松实现Modbus TCP到EtherCAT的转换,让设备间的通信变得简单。
高性能处理器,稳定可靠的数据传输。在工业控制环境中,稳定性至关重要。我们的网关采用高性能处理器,确保您的数据在设备之间快速、可靠地传输,保障您的工业生产不受阻碍。
6.兼容设备列表
我们的网关支持与ETHERCAT协议PLC或ETHERCAT主站的通讯,包括但不限于:
倍福twincatPLC
西门子PLC
施耐德PLC
欧姆龙PLC
汇川PLC
罗克韦尔PLC
三菱PLC
审核编辑 黄宇
-
机器人
+关注
关注
211文章
28373浏览量
206893 -
网关
+关注
关注
9文章
4439浏览量
51045 -
总线协议
+关注
关注
0文章
115浏览量
14849 -
ethercat
+关注
关注
18文章
685浏览量
38669
发布评论请先 登录
相关推荐
焊接机器人安装与调试指南
EtherCAT转Profibus总线协议转换网关
焊接机器人拖拽轨迹怎么设置

焊接机器人示教模式怎么设置

EtherCAT从站转CANopen主站协议网关(JM-ECT-COP)
Porfinet从转EtherCAT从总线协议转换网关

焊接机器人调试技巧有哪些

焊接机器人的应用领域有哪些

PLC与伺服完美融合:Profinet转EtherCAT网关配置详解
EtherCAT转CANopen网关在工业领域的应用方法
焊接机器人自动寻位原理是什么
通过Profinet转EtherCAT网关将伺服驱动与Profinet通讯
焊接机器人的工作原理与优势分析






 工商网监
工商网监
评论