 双闭环PID先调内环还是外环
双闭环PID先调内环还是外环
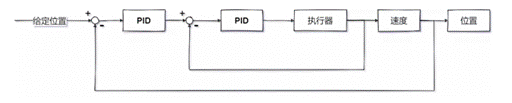
在双闭环控制系统中,通常存在两个控制环:内环和外环。内环主要负责快速响应和稳定系统,而外环则负责实现更高层次的控制目标。在进行PID调节时,通常需要先调整内环,然后再调整外环。以下是关于双闭环PID调整的分析:
一、双闭环控制系统的基本概念
- 双闭环控制系统的定义
双闭环控制系统是一种具有两个反馈控制环的控制系统。它通常由一个内环和一个外环组成,内环负责快速响应和稳定系统,外环则负责实现更高层次的控制目标。 - 内环和外环的功能
内环主要负责对系统的动态性能进行控制,以实现快速响应和稳定。内环通常采用PID控制器,通过调节系统的输入,使系统的输出快速跟踪给定的参考值。
外环主要负责对系统的稳态性能进行控制,以实现更高层次的控制目标。外环通常采用PI控制器,通过调节内环的设定值,使系统的输出达到期望的稳态值。 - 双闭环控制系统的优点
双闭环控制系统具有以下优点:
(1)快速响应:内环可以快速响应系统的扰动,使系统迅速恢复稳定。
(2)稳定性好:内环可以有效地抑制系统的扰动,提高系统的稳定性。
(3)控制精度高:外环可以精确地控制系统的稳态性能,实现更高层次的控制目标。
二、双闭环PID调整的原则
- 先调整内环
在双闭环PID调整中,通常需要先调整内环。这是因为内环负责快速响应和稳定系统,其性能直接影响到整个控制系统的性能。通过调整内环的PID参数,可以使系统在面对扰动时具有更好的动态性能。 - 再调整外环
在外环调整中,需要根据内环的调整结果来设定外环的PID参数。外环的调整主要是为了实现更高层次的控制目标,如稳态误差的减小、系统的调节时间的缩短等。 - 逐步调整
在双闭环PID调整过程中,需要逐步进行。首先调整内环的PID参数,观察系统的性能变化,然后根据内环的调整结果来调整外环的PID参数。通过逐步调整,可以确保系统在整个调整过程中保持稳定,避免出现过调和振荡现象。
三、双闭环PID调整的方法
- 内环PID参数的调整
(1)比例系数(Kp)的调整:比例系数决定了PID控制器对偏差的敏感程度。增大Kp可以提高系统的响应速度,但过大的Kp可能导致系统的过调和振荡。因此,在调整Kp时,需要根据系统的实际情况进行逐步调整。
(2)积分系数(Ki)的调整:积分系数决定了PID控制器对偏差积分的敏感程度。增大Ki可以提高系统的稳态性能,减小稳态误差。但过大的Ki可能导致系统的过调和振荡。因此,在调整Ki时,需要根据系统的实际情况进行逐步调整。
(3)微分系数(Kd)的调整:微分系数决定了PID控制器对偏差变化率的敏感程度。增大Kd可以提高系统的抗扰动能力,减小系统的振荡。但过大的Kd可能导致系统的响应速度降低。因此,在调整Kd时,需要根据系统的实际情况进行逐步调整。 - 外环PID参数的调整
(1)比例系数(Kp)的调整:在外环调整中,Kp的调整主要是为了减小系统的稳态误差。增大Kp可以减小稳态误差,但过大的Kp可能导致系统的过调和振荡。因此,在调整Kp时,需要根据内环的调整结果进行逐步调整。
(2)积分系数(Ki)的调整:在外环调整中,Ki的调整主要是为了提高系统的稳态性能。增大Ki可以减小稳态误差,提高系统的稳定性。但过大的Ki可能导致系统的过调和振荡。因此,在调整Ki时,需要根据内环的调整结果进行逐步调整。 - 调整过程中的注意事项
(1)在调整过程中,需要密切观察系统的性能变化,避免出现过调和振荡现象。
(2)在调整过程中,需要根据系统的实际情况进行逐步调整,避免参数调整过快导致系统不稳定。
(3)在调整过程中,需要充分考虑系统的非线性、时变等特性,确保调整结果的准确性和可靠性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
PID
+关注
关注
36文章
1473浏览量
85999 -
参数
+关注
关注
11文章
1864浏览量
32499 -
控制系統
+关注
关注
0文章
30浏览量
2708
发布评论请先 登录
相关推荐
四轴飞行器的PID算法
同样也会受到外界干扰,引入z轴加速度环可有效避免外界干扰造成的影响,增强了系统的鲁棒性。 四轴飞行器双闭环PID控制,如图3、图4所示。角度作为外环,角速度作为
发表于 01-15 17:03
基于双闭环模糊PID控制器的开关电源控制的设计
的双闭环控制律存在一定的缺陷,同时这一缺陷已经越来越无法适应集成电路工业对供电需求的发展。开关电源是一种非常典型的非线性系统,无法建立精确的模型。于此同时模糊PID双
发表于 10-08 15:32
请问四轴的串级pid调试调内环候时外环pid参数如何设置?
四轴的串级pid调试,在调内环的时候,外环pid的三个参数是怎么设置?遥控器给的控制是给在外环上,那我现在要调节
发表于 08-06 03:56
基于BP神经网络控制+Simulink双闭环直流调速系统仿真设计
最近一个月的时间没有更博,跟随老师出差谈项目了。前段时间学习了电机的智能控制,这次把设计好的基于BP神经网络PID控制器应用于双闭环直流调速系统。双
发表于 06-28 12:03
关于三重闭环PID如何调节问题,请教各位如何能够快速准确调节成功呢?
PID调节是否调节成功后输入和输出偏差是否应该接近0呢?自己三闭环调节总有一个偏差不接近0。多重PID调节应该如何调呢?比如先从外环还是
发表于 07-30 09:58
PID调节外环PID调节外环
一、PID调节外环:ATC_ANG_PIT_P 俯仰轴角度控制器P增益ATC_ANG_RLL_P 滚动轴角度控制器P增益ATC_ANG_YAW_P 航向轴角度控制器P增益内环
发表于 09-17 06:25

串级pid内环和外环怎么确定
在控制系统中,串级PID控制器是一种常见的控制策略,它通过将两个PID控制器串联起来,实现对系统的精确控制。串级PID控制器由内环和外环组成





 工商网监
工商网监
评论