 2024世界机器人大会落幕,人形机器人具身智能如何迸发更强感知力?
2024世界机器人大会落幕,人形机器人具身智能如何迸发更强感知力?
近日,备受瞩目的2024世界机器人大会(WRC)在北京圆满落下帷幕。在这场具身智能在年初成为科技界热议话题后,北京首次举办的世界级机器人行业盛会上,共有27款人形机器人精彩亮相,并成为关注的焦点。
本次大会发布了《人形机器人十大趋势展望》,对未来人形机器人的发展方向进行了深入洞察。报告中特别强调了具身智能的重要性,即发展能够在复杂多变的环境中做出快速、精确反应的高质量、高性能智能系统。为实现这一目标,必须依托于技术先进的人形机器人专属部组件与材料,例如高精度传感器等,以构建更加稳定和高性能的硬件系统。
从报告可知,建立人形机器人多模态大模型的关键在于多源感知的融合。通过整合多种感知数据,生成丰富的多模态信息,可以有效提升机器人的泛化能力,使其更好地理解和适应各种环境。
回看感知层的发展,传感器技术当前正朝着数字化、智能化、小型化、集成化、节能化以及高精度等方向迅速发展。在此进程中,MEMS技术和柔性技术显得尤为关键,它们为传感器的进一步迭代升级提供了强有力的技术支撑。
MEMS技术
MEMS技术,即微机电系统(Micro-Electro-Mechanical Systems)技术,是一种高度集成的微米级尺寸的微型系统。MEMS器件的制造技术包括表面微加工、体微加工、LIGA技术等,这些技术允许在硅片上制造复杂的三维结构。MEMS技术的优势在于其小尺寸、低重量、低功耗、高集成度和成本效益。
MEMS超声波传感器
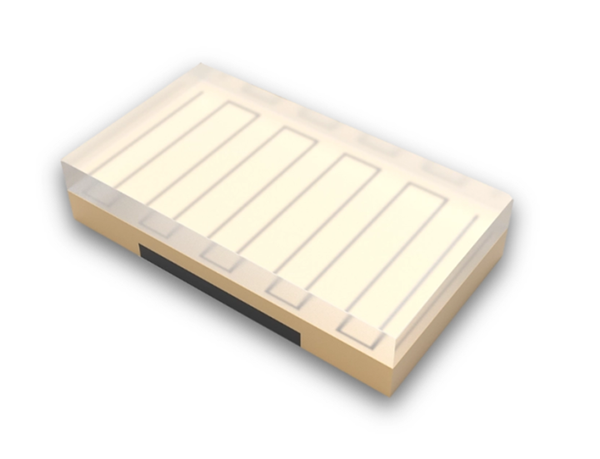
MEMS超声波传感器是将压电薄膜作为功能薄膜与硅基MEMS(微机电)相集成的新一代超声波传感器产品,通过晶圆级MEMS微纳工艺制造,单个芯片兼具超声波发射(Tx)与接收(Rx)复用功能。

相较其他技术方案而言,使用MEMS超声波传感器方案来补充机器人视觉系统对于距离感知的缺失或将更符合整体设计和经济效益,它有更广的感应范围、更小的尺寸和隐藏式安装等优势。
视场角达180°,探测范围广
MEMS超声波传感器视场角可达180°,探测范围宽广,机器人前后各安装一个,即可达到360°视场角的效果,足以达到日常协作的感应需求。
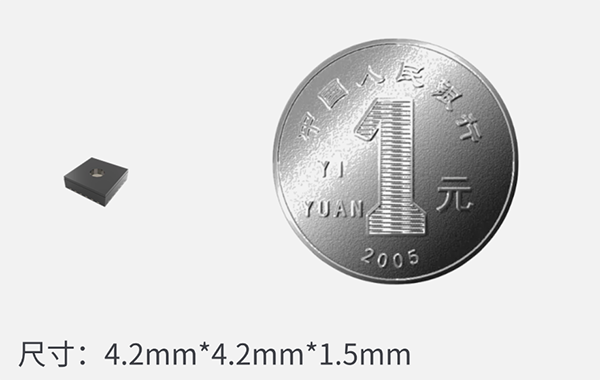
毫米级尺寸,体积小
得益于MEMS制造技术对传感器表面微加工、体微加工等加持下,MEMS超声波传感器尺寸为4.2*4.2*1.5mm,体积远小于其他常规传感器。
隐藏式安装
在实际应用中,MEMS超声波传感器可进行隐蔽式安装,通过巧妙的设计达到肉眼无法察觉的效果,从而不影响整机外观设计,保持机器人外观设计完整度和美观度。
柔性技术
柔性技术(Flexible Manufacturing Technology, FMT)在机器人制造中的应用,是指通过使用柔性材料,能够实现机器人关键部分组件的任意弯曲、折叠或拉伸而不会导致损坏,从而实现高动态性能。柔性技术的发展,也为可穿戴设备、电子健康监测、智能纺织品等带来了新的可能性。
柔性压力传感器
先进的纳米界面电容原理的离电型柔性传感器,可以快速准确对作用在产品表面的压力进行检测。具备检测灵敏、准确、快速、稳定,并且体积小、安装与使用简单的特点。尤其适用于机器人检测抓手受力的应用。
多个柔性压力传感器集成阵列,可作为机器人电子皮肤使用,传感器通过数据采集和信号处理单元,将压力信号转换为电信号,从而实时检测微小压力变化,实现“人类级”皮肤的压力感应功能。
智能化集成,支持二次开发
该传感器搭载的采集器模块遵循开放式通信协议,不仅能识别抓取物品的种类和状态,监测掉落情况,还能探测受力强度。模块支持二次开发,允许用户根据具体应用场景进行定制优化,以扩展其功能和适应性。
柔性技术,适用于不同表面
柔性压力传感器由柔性材料制成,采用可弯曲的基底,多阵列式也能具有可弯曲性、可折叠性、可拉伸性,可以适应不同的表面形状,使其能够用于不规则或弯曲的物体表面。
体积小,多阵列排布实现多种功能
产品尺寸为3*2*0.3mm,重量不足1g,极其轻薄,有利于通过不同的阵列排布实现不同的功能应用,如压力映射、触觉反馈、电子皮肤、柔性显示器等,于阵列化的传感器可以提供更高维度的检测和数据分析能力。
在实际应用中,柔性压力传感器阵列如被折叠成更紧凑的形式,更便于携带和存储;可拉伸性使传感器即使承受一定程度的形变也而不损坏,助力未来机器人实现“超人能力”的高动态性能应用。
随着技术发展,业内较为领先的传感器企业已开始研发“MEMS+柔性”两大先进技术结合的传感器,我们期待有更多更好的传感器产品。
-
传感器
+关注
关注
2557文章
51729浏览量
758798 -
硬件系统
+关注
关注
0文章
48浏览量
11495 -
人形机器人
+关注
关注
3文章
559浏览量
16957
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.全书概览与第一章学习
《具身智能机器人系统》第7-9章阅读心得之具身智能机器人与大模型
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
名单公布!【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
星尘智能Astribot S1亮相世界机器人大会
2024世界机器人大会盛启:优必选引领人形机器人工业新纪元
软通动力与智元机器人携手亮相世界机器人大会

智动未来!广和通AI解决方案惊艳2024世界机器人大会





 工商网监
工商网监
评论