 双边滤波原理_HLS实现Bilateral Filtering双边滤波器
双边滤波原理_HLS实现Bilateral Filtering双边滤波器

双边滤波(Bilateral filter)是一种可以保边去噪的滤波器。之所以可以达到此去噪效果,是因为滤波器是由两个函数构成。一个函数是由几何空间距离决定滤波器系数。另一个由像素差值决定滤波器系数。
双边滤波器中,输出像素的值依赖于邻域像素的值的加权组合,权重系数w(i,j,k,l)取决于定义域核和值域核的乘积,同时考虑了空间域与值域的差别,而Gaussian Filter和α均值滤波分别只考虑了空间域和值域差别。
双边滤波原理(Bilateral Filtering)
基本思路
双边滤波(bilateral filtering)的基本思路是同时考虑将要被滤波的像素点的空域信息(domain)和值域信息(range)。因此是一种 combined 滤波方式,因此叫做 bilateral ,即同时考虑两方面的信息。首先,对于图像滤波来说,一个通常的intuition是:(自然)图像在空间中变化缓慢,因此相邻的像素点会更相近。但是这个假设在图像的边缘处变得不成立。如果在边缘处也用这种思路来进行滤波的话,即认为相邻相近,则得到的结果必然会模糊掉边缘,这是不吼的,因此考虑再利用像素点的值的大小进行补充,因为边缘两侧的点的像素值差别很大,因此会使得其加权的时候权重具有很大的差别,从而使得只考虑自己所属的一边的邻域。可以理解成先根据像素值对要用来进行滤波的邻域做一个分割或分类,再给该点所属的类别相对较高的权重,然后进行邻域加权求和,得到最终结果。
实现原理
在 bilateral filtering 中,两个要素即:closeness 和 similarity ,或者说 domain 和 range ,或者 geometric 和 photometric ,其数学表达方式相近,如下:
其中积分号前面为归一化因子,这里考虑对所有的像素点进行加权,c 和 s 是 closeness 和 similarity 函数,x 代表要求的点,f (x) 代表该点的像素值。f(x) –》 h(x) 为滤波前后的image。我们最后的滤波函数为
由于domain component,使得滤波特性较好,由于range component,使得crisp edge 可以保持。
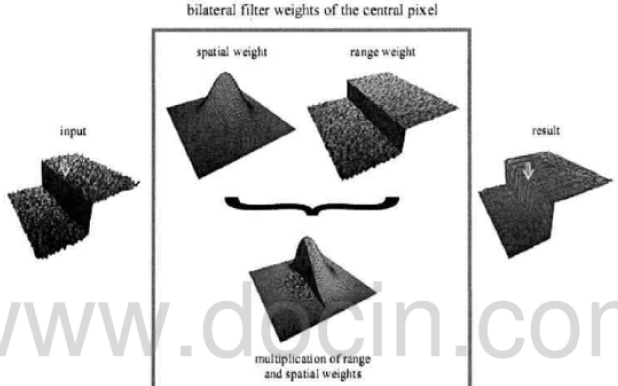
下图示意了有边缘的时候的权重和最后的滤波结果,可以看出权重在边界有很明显的分界,从而几乎只对自己所属的边缘一侧的像素点进行加权。
实现 c 和 s 两个函数的一种方法即 Gaussian 核,决定其性质的为各自的sigma参数,即 σdσd 和 σrσr 。
template
unsigned char bilateralProc(
hls::Window &win,
WEIGHT_VALUE weights[WIN_SZ*WIN_SZ][256],
WEIGHT_MAP map[(WIN_SZ》》1)*(WIN_SZ》》1)+1])
{
#pragma HLS INLINE
ap_ufixed《16,1》 color_weights;
ap_ufixed《32,16》 weight_sum=0;
ap_ufixed《32,16》 px_sum=0;
for (int i=0;i》1;
ap_uint《8》 sub_sq = sub*sub;
ap_int《8》 ei = i-sub;
ap_int《8》 ej = j-sub;
ap_uint《8》 comp = ei*ei;
comp += ej*ej;
if(comp》sub_sq)
{
continue;
}
else
{
ap_int《9》 diffpx = win(i, j) - win(WIN_SZ》》1,WIN_SZ》》1);
if(diffpx 《 0)
{
diffpx = -diffpx;
}
if(comp == 0)
color_weights = 1;
else
color_weights = (ap_ufixed《16,1》)weights[map[comp]][diffpx];
px_sum += (color_weights)*(ap_uint《16》)(win(i,j));
weight_sum += color_weights;
}
}
})(px_sum/weight_sum) + (ap_ufixed《32,16》)(0.5);
return value;
}
template
void _filter(
hls::Mat &src,
hls::Mat &dst,
WEIGHT_VALUE weights[WIN_SZ*WIN_SZ][256],
WEIGHT_MAP map[(WIN_SZ》》1)*(WIN_SZ》》1)+1])
{
HLS_SIZE_T IMG_HEIGHT = src.rows;
HLS_SIZE_T IMG_WIDTH = src.cols;
hls::filter2d_kernel fk_opr;
hls::Window src_kernel_win;
hls::LineBuffer main_buf;
hls::LineBuffer col_buf;
HLS_SIZE_T fillvalue=255;
HLS_SIZE_T loophight=IMG_HEIGHT+WIN_SZ-1;
HLS_SIZE_T loopwidth=IMG_WIDTH+WIN_SZ-1;
HLS_SIZE_T buf_row=0;
HLS_SIZE_T buf_rows,buf_cols;
HLS_SIZE_T heightloop= IMG_HEIGHT+WIN_SZ-1;
HLS_SIZE_T widthloop = IMG_WIDTH+WIN_SZ-1;//one pixel overlap, so it should minus one
loop_height: for(HLS_SIZE_T i= 0;i《 heightloop;i++) {
#pragma HLS LOOP_TRIPCOUNT MAX=ROWS
loop_width: for (HLS_SIZE_T j= 0;j《 widthloop;j++) {
#pragma HLS DEPENDENCE array inter false
#pragma HLS LOOP_TRIPCOUNT MAX=COLS
#pragma HLS LOOP_FLATTEN OFF
#pragma HLS PIPELINE II=1
if(j
》 temp;
else
temp=fillvalue;
main_buf(0,j)=(temp&0xFF);
}
for(buf_row=0; buf_row=1; buf_row--){
HLS_TNAME(HLS_8UC1) temp=col_buf(buf_row-1,0);
src_kernel_win(buf_row-1,0)=temp;
main_buf(buf_row,j)=temp;
}
}
else
{
for(HLS_SIZE_T row=0; row=1; col--)
{
src_kernel_win(row,col) = src_kernel_win(row,col-1);
}
}
for(HLS_SIZE_T row=0; row= (WIN_SZ-1) && j》=(WIN_SZ-1))
{
ap_uint《8》 temp_out = bilateralProc(src_kernel_win, weights, map);
dst.data_stream[0] 《《 temp_out;
}
}//w
}//h
}
void hls_BilateralFilter( AXI_STREAM &INPUT_STREAM, AXI_STREAM &OUTPUT_STREAM,int rows, int cols,
WEIGHT_VALUE weights[MAX_WIN_SZ*MAX_WIN_SZ][256],
WEIGHT_MAP map[(MAX_WIN_SZ》》1)*(MAX_WIN_SZ》》1)+1])
{
#pragma HLS INTERFACE axis port=INPUT_STREAM
#pragma HLS INTERFACE axis port=OUTPUT_STREAM
#pragma HLS INTERFACE s_axilite port=rows bundle=BUS_CTRL
#pragma HLS INTERFACE s_axilite port=cols bundle=BUS_CTRL
#pragma HLS INTERFACE s_axilite port=weights bundle=BUS_CTRL
#pragma HLS INTERFACE s_axilite port=map bundle=BUS_CTRL
#pragma HLS INTERFACE s_axilite port=return bundle=BUS_CTRL
hls::Mat src(rows,cols);
hls::Mat dst(rows,cols);
hls::Mat src0(rows,cols);
hls::Mat src1(rows,cols);
hls::Mat gray0(rows,cols);
hls::Mat gray1(rows,cols);
#pragma HLS dataflow
hls::AXIvideo2Mat(INPUT_STREAM, src);
hls::Duplicate(src,src0,src1);
hls::CvtColor(src0,gray0);
_filter(gray0, gray1, weights, map);
hls::CvtColor(gray1,dst);
hls::Mat2AXIvideo(dst, OUTPUT_STREAM);
}
C仿真效果:
原图
双边滤波器
对比一下高斯模糊滤波器
-
双边滤波
+关注
关注
0文章
4浏览量
2167
发布评论请先 登录
基于Matlab与FPGA的双边滤波算法实现

一种快速Bilateral滤波器的设计与实现
详细解析滤波器的定义,滤波器的特性,滤波器的工作原理,滤波器的分类,滤波器的典型电路原理图

双边滤波点云去噪算法
图像处理基础(5):双边滤波器
如何进行双边滤波的图像处理算法研究
双边带调制原理_双边带调制的优缺点
LabVIEW:适合点云平滑的双边滤波器





评论