 高压放大器在柔性爬行机器人驱动性能研究中的应用
高压放大器在柔性爬行机器人驱动性能研究中的应用
实验名称:柔性爬行机器人的材料测试
研究方向:介电弹性体的最小能量结构是一种利用DE材料的电致变形与柔性框架形变相结合设计的新型柔性驱动器,所谓最小能量是指驱动器在平衡状态时整个系统的能量最小,当系统在外界的电压刺激下就会产生对应大小的形变,当外界的电压减小或者消失的时候,整体系统由于变量的移除从而变回最小能量状态。其制作方法通常是将DE薄膜预拉伸之后固定在刚性框架上,然后将柔性框架裁剪后粘贴在薄膜的一侧或两侧,当撤销刚性框架后,在DE弹性回复力的作用下,外部的框架由简单的平面结构变成受力复杂的马鞍形,当在DE薄膜上施加电压时,薄膜的麦克斯韦应力在电应力的作用下减小,马鞍形的结构就又会变成刚开始的平面结构。
实验目的:为了减少传统马鞍形的最小能量体能量不足对驱动器所造成的影响,提出了一种新型的DE驱动器,该驱动器由弹簧和加载电压后可以产生纯剪切形变的介电弹性体组成。正如所述,DE薄膜的纯剪切形变可以实现在单一方向的往复驱动,并且有着比较高的驱动应变,所以DE薄膜的纯剪切形变在介电弹性体驱动器、双向稳定器和柔性驱动机器人中有着广泛的运用。
测试设备:ATA-7050高压放大器、介电弹性体材料、压力传感器、位移传感器等。


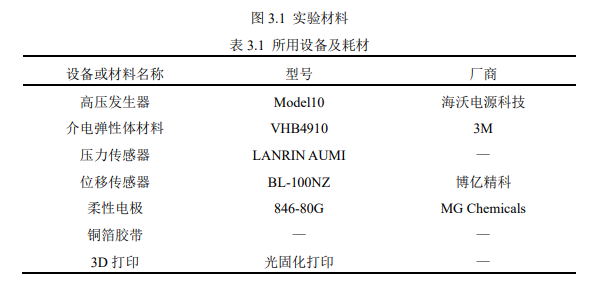
实验过程:在众多的介电弹性体材料中,如图3.1(a)所示,选择丙烯酸胶带为实验材料,该材料有着形变能力大、单位条件下的能量密度高、有着较高的介电常数等特点。并且因为该材料为日常耗材,所以比较容易获得且价格适中。对于柔性电极,如图3.1(b)所示,本文选择了碳导电油脂846-80G作为制造材料。对于实验所需要的高压,图3-1(c)所示,使用了安泰电子科技有限公司的ATA-7050高压电源,其电压最大输出为10KV,可以提供多种列如常波、三角波、正弦波、方波等多种信号。有着比较高的安全性。位移传感器使用的是BL-100NZ激光位移传感器,其精度为0.075mm。压力传感器为LANRINAUMI型,其测量精度为1g,量程为1kg。位移传感器和压力传感器都可以通过数据线连接电脑里面的上位机并实时采集数据。其他耗材如表3.1所示。
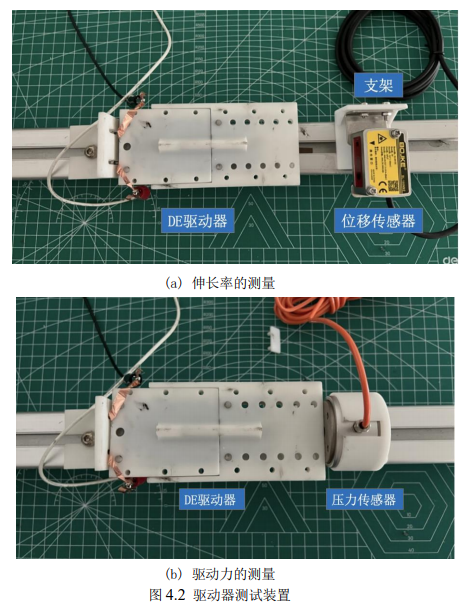
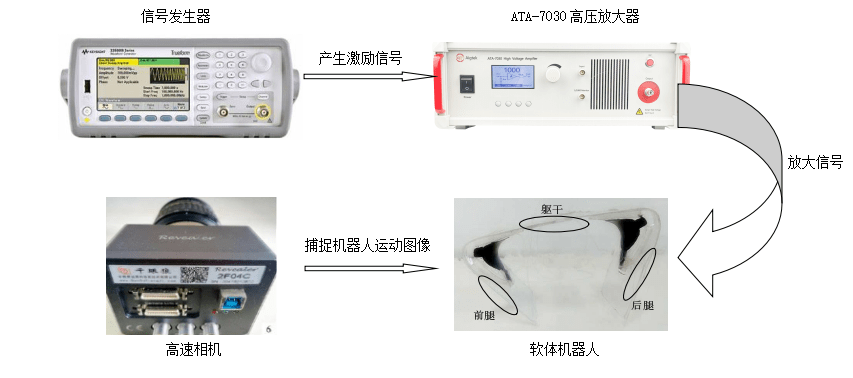
实验结果:如图4.2(a)和4.2(b)所示是介电弹性体驱动器的伸长量和驱动力测试的实物图,在测量电压的大小和DE驱动器位移量的关系时,可以先把驱动器不用伸长的一端固定在支架上,另一端悬空可以自由移动。其具体的步骤如下:(1)在铝型材支架的一端固定上驱动器,另一端固定上激光位移传感器,传感器发射出的激光打在驱动器一端的外壳上;(2)通过高压发生器对DE驱动器进行电压驱动;(3)随着驱动器接收的电压不断增大,驱动器的一端也在不断的伸长,直到驱动器里面的介电弹性体薄膜被击穿;(4)在驱动器伸长的过程中,位移传感器不断的记录数据并上传到电脑端的上位机中;(5)制作多个同一大小的驱动器样品进行实验,去的多组的测量数据后取平均值。在测量驱动器的驱动力时,步骤与上述一致:(1)固定住驱动器和压力传感器,保证驱动器只有一端可以活动;(2)将DE驱动器介入高压发生器;(3)随着电压的不断增大,压力传感器读取示数后传入电脑;(4)测量多个样品并取其平均值。
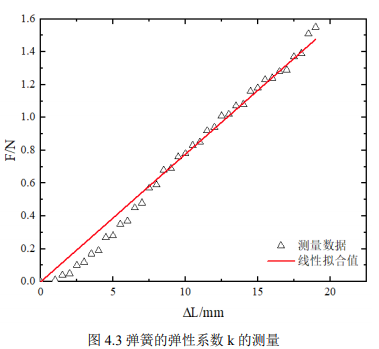
在进行DE驱动器的性能测试之前,本文首先进了弹簧的弹力系数测试,弹簧初始为无加载状态,压力传感器在电机的推动下对弹簧进行挤压。实验结果如图4.3所示,因为弹簧在形变的过程中并不能一直保持垂直压缩的状态。可能会在弹力的作用下发生形变,所以结果并不是一条完美的直线。但是因为安装在外壳上的弹簧有外壳的阻挡,因此可以保持单一方向的压缩,并不会出现类似的情况。
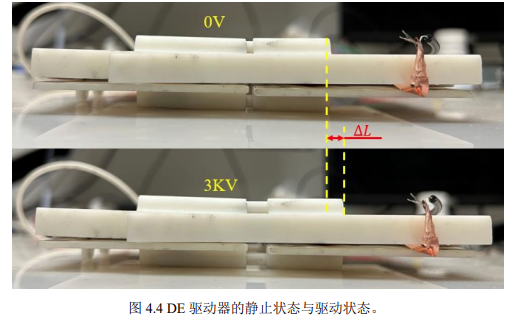
DE驱动器通电后就会发生形变,如图4.4所示,该图为驱动器在静止状态和通入4kv电压后的驱动状态的对比。驱动状态和静止状态的长度区别即为DE驱动器的伸长量ΔL。由于外壳上的弹簧存在,DE薄膜的恢复力与弹簧的弹力在驱动方向上维持平衡,这时驱动器处于静止状态。当在DE薄膜上施加大电压时,平衡状态由于麦克斯韦应力的产生而被打破,这时DE驱动器就会发生位移,并会在新的位置达到平衡,此时驱动器的状态就被成为驱动状态。
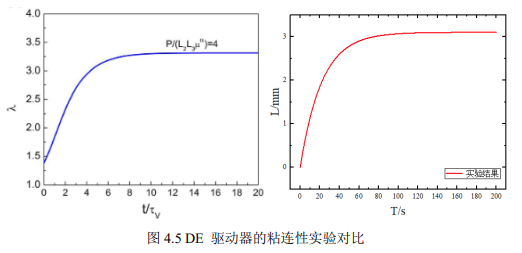
本文在测试驱动器的静态特性时,保证电压为4kv不变,然后选用200v/s的三角波作为DE驱动器的驱动信号。在实验中因为200v/s三角波的压缩量是比较小的,所以可以认为DE薄膜在每个时刻都是相对静态的,即发生器输出的电压相对不变的。如图4.5所示为驱动器的粘连性实验,左图为预测模型,右图为实验结果,从对比图可以看出实验结果是比较吻合的。
放大器推荐:ATA-7050
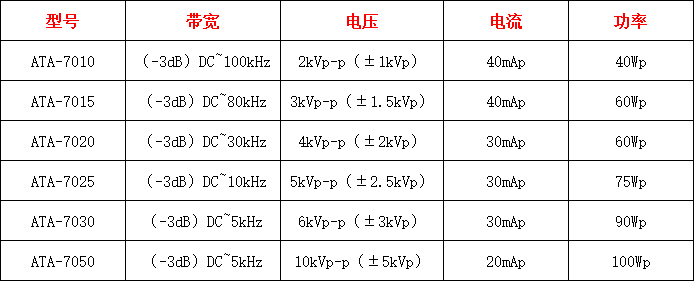
图:ATA-7050高压放大器指标参数
本文实验素材由西安安泰电子整理发布,西安安泰电子科技有限公司(Aigtek)是国内专业从事测量仪器研发、生产和销售的高科技企业。公司致力于功率放大器、功率信号源、功率放大模块、计量校准产品等产品为核心的相关行业测试解决方案的研究,为用户提供具有竞争力的测试方案,Aigtek已经成为在业界拥有广泛产品线,且具有相当规模的仪器设备供应商,样机都支持免费试用。
-
驱动
+关注
关注
12文章
1840浏览量
85307 -
柔性
+关注
关注
0文章
71浏览量
14784 -
高压放大器
+关注
关注
4文章
496浏览量
14361 -
四足爬行机器人
+关注
关注
1文章
3浏览量
1130
发布评论请先 登录
相关推荐
功率放大器基于振动驱动的旋转及攀爬软体机器人的研究
功率放大器基于振动驱动的旋转及攀爬软体机器人的研究
回收发那科放大器,回收发那科机器人,回收发那科CPU

高压放大器在柔性材料测试中的应用
Aigtek:介电弹性体高压放大器在软体机器人研究中的应用

基于DOE的管道爬行机器人轻量化研究
Aigtek高压放大器在柔性爬行机器人驱动性能研究中的应用

安泰ATA-7015高压放大器在机器人测试中的应用研究

ATA-7030高压放大器在电致变形柔性致动器表情机器人实验中的应用

高压放大器在软体机器人特性测试中的应用






 工商网监
工商网监
评论