 单片机SPI通信实现
单片机SPI通信实现

在深入探讨单片机(如基于STM32、AVR、PIC等)如何通过SPI(Serial Peripheral Interface)进行通信之前,我们先概述SPI通信的基本原理,随后以STM32微控制器为例,详细解释如何配置SPI接口,并提供相应的代码示例。
SPI通信基本原理
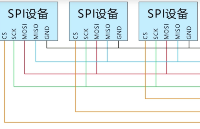
SPI是一种高速、全双工、同步的通信总线,用于微控制器与各种外围设备(如传感器、存储器、显示器等)之间的通信。SPI由以下几根线组成:
- SCK (Serial Clock) : 串行时钟信号,由主设备生成,用于同步数据传输。
- MOSI (Master Out Slave In) : 主设备数据输出,从设备数据输入。
- MISO (Master In Slave Out) : 主设备数据输入,从设备数据输出。
- SS (Slave Select) : 从设备选择信号,由主设备控制,用于选择通信的从设备(有时也写作CS,Chip Select)。
SPI可以配置为多种模式,主要通过时钟极性和相位的不同组合来实现(CPOL和CPHA):
- CPOL (Clock Polarity): 时钟信号的空闲状态(高电平或低电平)。
- CPHA (Clock Phase): 数据采样发生在时钟的哪个边缘(上升沿或下降沿)。
STM32 SPI配置示例
1. 硬件连接
首先,确保你的STM32开发板上的SPI引脚已经正确连接到目标外设的SPI接口。以STM32F103为例,通常SPI1的引脚包括PA5(SCK), PA6(MISO), PA7(MOSI), 和 PA4(NSS)。
2. 软件配置
STM32的SPI配置通常通过HAL库或标准外设库来实现。这里以STM32CubeMX结合HAL库为例。
a. 使用STM32CubeMX配置SPI
- 打开STM32CubeMX,创建一个新项目并选择你的STM32设备。
- 在“Pinout & Configuration”选项卡中,找到SPI接口(如SPI1),点击配置它。
- 设置SPI的基本参数,如SPI模式(Mode)、数据大小(Data Size)、时钟极性(CPOL)、时钟相位(CPHA)、波特率预分频器(Baudrate Prescaler)等。
- 启用中断(如果需要)和DMA(如果处理大量数据)。
- 生成代码,并选择合适的IDE(如Keil uVision, IAR, SW4STM32等)。
b. 编写SPI通信代码
以下是基于HAL库的SPI初始化代码和简单的读写函数示例。
#include "stm32f1xx_hal.h"
SPI_HandleTypeDef hspi1;
void MX_SPI1_Init(void)
{
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi1.Init.CRCPolynomial = 7;
HAL_SPI_Init(&hspi1);
}
void HAL_SPI_MspInit(SPI_HandleTypeDef* hspi)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(hspi- >Instance==SPI1)
{
__HAL_RCC_SPI1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**SPI1 GPIO Configuration
PA5 ------ > SPI1_SCK
PA6 ------ > SPI1_MISO
PA7 ------ > SPI1_MOSI
*/
GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// 如果需要,配置NSS引脚
// ...
}
}
// SPI 发送函数
HAL_StatusTypeDef SPI_SendData(uint8_t *pData, uint16_t Size)
{
return HAL_SPI_Transmit(&hspi1, pData, Size, HAL_MAX_DELAY);
}
// SPI 接收函数
HAL_StatusTypeDef SPI_ReceiveData(uint8_t *pData, uint16_t Size)
{
return HAL_SPI_Receive(&hspi1, pData, Size, HAL_MAX_DELAY);
}
// 可以在主函数或其他地方调用这些函数进行通信
int main(void)
{
HAL_Init();
MX_SPI1_Init();
uint8_t txData[] = {0x01, 0x02, 0x03};
uint8_t rxData[3];
// 发送数据
if(HAL_OK == SPI_SendData(txData, sizeof(txData)/sizeof(txData[0])))
{
// 接收数据(这里假设立即回复)
if(HAL_OK == SPI_ReceiveData(rxData, sizeof(rxData)/sizeof(rxData[0])))
{
// 处理接收到的数据
}
}
while (1)
{
// 循环体
}
}
总结
以上代码示例展示了如何在STM32微控制器上配置和使用SPI接口进行基本的数据发送和接收。在实际应用中,你可能需要根据具体的外设规格调整SPI的配置参数,并处理通信过程中的错误和中断。此外,对于复杂的应用场景,还可能需要实现更高级的通信协议和数据处理逻辑。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6078文章
45618浏览量
674985 -
STM32
+关注
关注
2313文章
11205浏览量
375107 -
SPI通信
+关注
关注
0文章
41浏览量
12018
发布评论请先 登录
相关推荐
热点推荐
LabVIEW串口通信实例:PC机与51单片机串口通信实例
相关课程推荐:《8周LabVIEW视觉项目编程实战特训营》LabVIEW串口通信实例:PC机与51单片机串口通信实例
发表于 06-28 20:04

PC 机与单片机串行通信实现
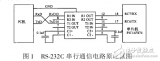
介绍了基于 MATLAB 的 PC 机与 PIC 系列单片机串行通信的实现方法。串行系统主要由 PC 机、RS-232C 电平转换器
发表于 09-03 11:13
•22次下载
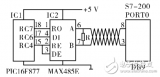
单片机与PLC之间的串行通信实现
本文主要介绍了单片机与PLC之间的串行通信实现,PIC16F877单片机内部集成了串行通信模块即通用同步/异步收发器USART模块,MAX485E芯片进行TTL电平与差分信号之间的转换
发表于 12-28 10:58
•3.4w次阅读
利用SPI实现单片机之间的通信
利用SPI实现单片机之间的通信本次实验是利用Proteus软件模拟两片AT89C52芯片之间的通信。因为AT89C52芯片上没有
发表于 11-24 18:21
•20次下载




评论