 水下高速激光通信系统的组网技术分析
水下高速激光通信系统的组网技术分析
关键词: 激光通信;激光驱动;光电探测;水下组网
中图分类号: TN929.1
文献标识码: A
DOI:10.16157/j.issn.0258-7998.170371
中文引用格式: 张军,蔡文郁,温端强. 水下高速激光通信系统及组网技术研究[J].电子技术应用,2017,43(9):53-56,60.
英文引用格式: Zhang Jun,Cai Wenyu,Wen Duanqian. Research on technology of underwater high speed laser communication system and networking[J].Application of Electronic Technique,2017,43(9):53-56,60.
0 引言
水声技术是目前最为成熟的水下通信技术之一,但声波在水中的传输速率极低,不及光速的二十分之一,而且功耗较大,很难搭载在水下机器人上进行水下数据通信。光学通信技术可以克服水下声学通信带宽窄、受环境影响大、可适用载波频率低和传输时延大等不足,因此在一些应用场景中,水下光学通信可以替代水下声学通信,以应对高传输速率、高带宽、中短距离通信的需求。水下光通信可分为LED光通信与激光通信,LED作为光源存在发散角度大、传输距离近等缺点[1],因此激光更适合作为水下光通信光源。而且,为水下传感器组网提供可靠的通信方式也成为光通信的一种应用场景。在中短距离范围内的传感器节点,水下光通信可以为节点间通信提供一种高速率、低硬件开销、高稳定性的通信方式。水声通信可以作为长距离范围的节点间通信方式,作为节点间通信方式的一种补充,从而更好地实现水下多传感器的无线组网[1]。
1 系统工作原理
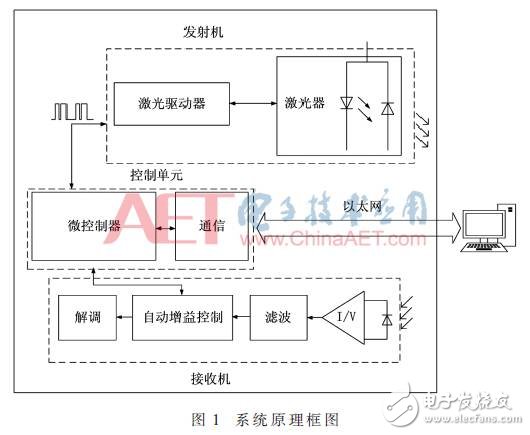
本文提出了一种基于激光通信的水下中短距离无线通信方案,总体设计框架如图1所示,主要由电源、控制单元、发射机、接收机构成。其中控制单元主要用于对外围模块的控制以及与外接的PC等设备进行基于以太网的数据交互;发射机主要用于将激励信号加载至激光器产生对应的光信号;接收机主要实现了将接收到的光信号转换为电信号,并对信号进行相应的处理,同时实现增益的自动控制,降低光信号强弱变化对电路的影响。
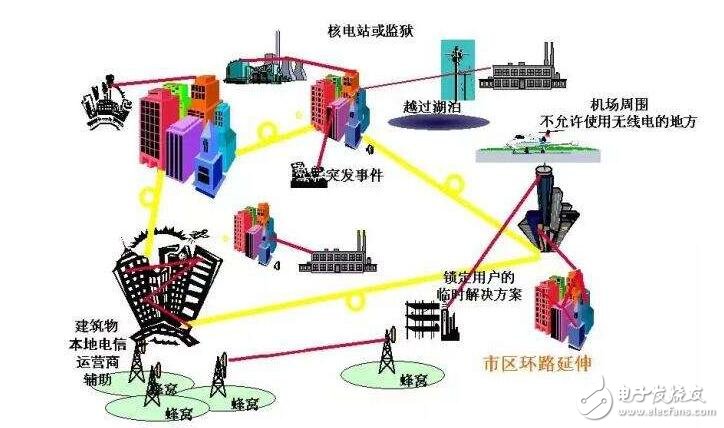
针对水下传感器组网的应用场景,本文提出了一种基于激光通信的水下传感器组网系统,如图2所示。每一个激光通信终端与传感器网络上的各种类型传感器通过RS-232总线相连。每一片区域所有的激光通信终端都通过POE(Power Over Ethernet)[3]连接至次接驳盒交换机上,POE供电最大功率达到12.95 W。此外,管理多片区域的次接驳盒交换机由一个主接驳盒交换机所管控,主接驳盒交换机通过光纤模块将网络信号转换为光纤信号,传送至岸基站。除此之外,通过配备光通信系统的AUV在水下的运动过程去收集所需要区域传感器所连接的激光通信终端设备发送来的传感器数据。随后,AUV通过多种通信方式将数据发送给海面上的浮标中转,通过卫星通信将数据传送给岸基站。

2 系统硬件设计
2.1 发射电路设计
激光器是一种敏感的光源器件,输入电流的稳定性直接影响激光器的工作寿命,纹波大或者毛刺大的电流将直接导致器件的安全使用甚至损坏器件。而电压源驱动电路无法提供一个稳定的电流,因此激光驱动电路应选用电流源驱动模式。本系统选用ADI公司的AD9660芯片作为激光驱动芯片。AD9660具有最大120 mA的偏置电流、180 mA的调制电流、1.5 ns/2 ns的超低上升/下降时间、最高达200 MHz的调制频率和高效的光功率控制环等特点。AD9660驱动电路原理如图3所示。

2.2 接收电路设计
接收电路主要包含光电转换电路、低通滤波器电路、自动增益控制电路。光电转换电路负责将光电二极管的微弱电流信号转换为电压信号,低通滤波器电路在将微弱电压信号放大的同时将干扰噪声过滤掉,自动增益控制电路将过滤后的信号控制在可控的幅值。
2.2.1 光电转换电路
光电二极管的输出信号是电流信号,电流-电压变换使用互阻抗放大器电路来实现。激光驱动芯片的光功率监测可获取光的强度,因此对于互阻抗放大器的选择要求较高,主要要求包括高输入阻抗、带宽大、高压摆率、低噪声、频率响应优秀等特点。本系统选用TI OPA657跨导放大器作为光电转换电路的核心器件,互阻抗放大器电路如图4所示。

2.2.2 光电转换电路
自动增益控制电路的核心由压控放大器VCA810、运算放大器OPA820以及单片机的D/A输出组成。VCA810是一款宽带的压控放大器,支持单端和差分输入,增益控制在-40 dB~40 dB的范围内线性变化。OPA820是一款单位增益稳定低噪声电压反馈运算放大器。自动增益控制电路原理如图5所示,通过对D/A输出的控制,将自动增益电路的输出控制在Vpp为1 V左右。

2.3 解调电路设计
解调电路的核心由高速并行A/D转换芯片ADS830E与FIFO芯片IDT7204构成,其原理如图6所示。A/D芯片的采样时钟由30 MHz有源晶振提供,晶振产生的波形经过74HC08构成的门电路进行整形,得到稳定的时钟信号。ADS830E芯片的输入模拟电压范围为1.5 V~3.5 V,因此需要将输入的电压偏置至2 V,由ADS830E的REFT与REFB通过电阻分压得到。同时输入信号由自动增益控制电路将峰峰值控制在1.5 V以内,以免超出安全输入范围,导致A/D芯片损坏。ADS830E的输入信号即为OPA691构成的电压跟随器的输出信号。

3 系统软件设计
3.1 软件总体设计
系统嵌入式软件部分包括主程序,主要实现系统初始化、LwIP协议栈、各类外设模块初始化以及控制系统协调工作;激光驱动控制程序主要驱动激光驱动芯片,将调制信号加载至激光器上,实现电信号到光信号的转换;自动增益控制程序主要通过反馈环路动态调节电路增益,实现自适应功能;解调数据读取程序主要实现定时读取FIFO缓存器IDT7204中保存的解调电路输出的数据,同时需要保证数据不丢失不覆盖;网络数据传输程序主要实现以太网服务器端与水下系统之间的数据交互。
3.2 软件设计
激光驱动代码主要依赖于对微控制器I/O根据AD9660操作时序对芯片进行的控制,从而实现激光驱动以及自动功率控制等功能。AD9660的驱动代码主要涉及到单片机对应GPIO口的初始化、配置环路的建立、写电流环路的建立等。
具体操作流程如下:
(1)使能AD9660芯片,即将DISABLLE引脚置为“0”;
(2)打开并建立偏置环路,即将BIAS CAL引脚置为“1”后再置为“0”;
(3)打开并建立调制环路,即将WRITE CAL与WRITE PULSE引脚置为“1”;
(4)将调制信号加载到激光二极管上,即将调制信号对应的高低电平对应置WRITE CAL与WRITE CAL引脚“1”或“0”;
(5)定期重新建立偏置环路;
(6)当不使用时失能AD9660,即将DISABLE引脚置为“1”。
3.3 以太网软件设计
以太网协议LwIP协议栈[4]针对PHY芯片的配置修改底层代码,使其支持DP83848的相关配置操作。然后开启控制器以太网DMA数据接收中断,使得微控制器能够保存接收到的临时数据。在硬件驱动都配置完毕后,开始初始化LwIP内核,随后运行应用程序的相关函数进行数据收发工作。程序流程如图7所示。

3.4 组网协议设计
本文设计的报文类型主要包括数据报文、控制报文、状态报文。报文主要由主节点序号、次节点序号、报文类型、数据段等字段组成。
序号主要为区分不同节点发送的数据,协议为在水下的每个传感器节点分配了一个唯一的节点号,节点号由主节点号与次节点号构成。主节点号代表了传感器区域,以一个次接驳盒交换机为一个区域,主节点序号从1开始,每增加一个次接驳盒交换机,主节点序号累加1。而次节点号代表了一个次接驳盒交换机下所连接的传感器,次节点号从1开始,每增加一个传感器,次节点号累加1,AUV发送至光通信终端的主次节点序号均为0。这种主次节点序号的分配方式,可以更好地对数据进行分类,优先检索主序列号,再根据主序列号检索次序列号。基于上述组网协议,AUV与传感器节点所连接的光通信终端的连接流程如图8所示。

4 综合调试
通信测试包含陆地测试与水下测试,通信从1 m~40 m,每隔2 mm测试一次传输误码率。误码率与接收距离的关系曲线如图9所示,其中实曲线代表陆地环境,虚曲线代表水下环境。横向对比可以发现,同种环境下,随着传输距离的增长,误码率同样也在增加;纵向对比可以发现,不同环境相同距离下,陆地环境的误码率要优于水下环境;同一环境相同距离下,随着传输速率的增高,误码率也在增加。

5 总结
本文设计并研制了一套水下高速蓝绿激光通信系统,同时为水下传感器观测网提供了一种组网解决方案。提出了系统软硬件设计及其实现方式,最终研制出一套体积较小、功耗较低、高速率的激光通信系统,克服了传统声学通信的缺陷,为水下传感器观测网络提供了一种有效的组网方式。
-
组网技术
+关注
关注
3文章
18浏览量
10427 -
光发射机
+关注
关注
0文章
16浏览量
10166 -
激光驱动芯片
+关注
关注
0文章
1浏览量
2163
原文标题:【论文精选】水下高速激光通信系统及组网技术研究
文章出处:【微信号:ChinaAET,微信公众号:电子技术应用ChinaAET】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
多孔径发射对大气激光通信系统误码率的影响
PPM水下激光通信同步技术的研究
激光通信技术详解_激光通信技术分哪几种_激光通信技术的分类






 工商网监
工商网监
评论