 CW32模块使用 红外循迹传感器
CW32模块使用 红外循迹传感器
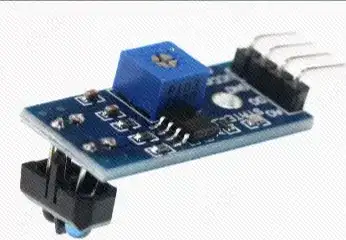
红外循迹传感器采用TCRT5000红外反射传感器,一种集发射与接收于一体的光电传感器,它由一个红外发光二极管和一个NPN红外光电三极管组成。检测反射距离1mm-25mm适用,传感器特设M3固定安装孔,调节方向与固定方便易用,使用宽电压LM393比较器,信号干净,波形好,驱动能力强,超过15mA。可以应用于机器人避障、机器人进行白线或者黑线的跟踪,可以检测白底中的黑线,也可以检测黑底中的白线,是寻线机器人的必备传感器。
01模块来源
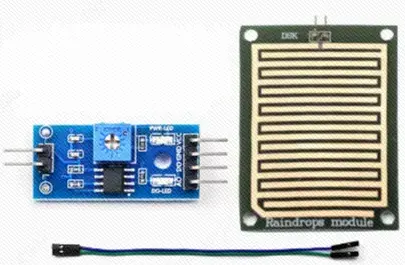
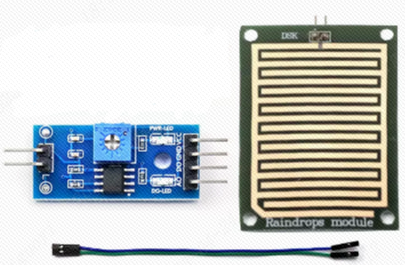
模块实物展示:
资料下载链接:https://pan.baidu.com/s/1Tjd2iHMtNVgwhqqCU_PmTQ
资料提取码:8zul
工作电压:3.3V-5V
检测反射距离:1mm~25mm适用
读取方式:ADC
以上信息见厂家资料文件
03移植过程
我们的目标是将例程移植至CW32F030C8T6开发板上【能够实现检测黑线的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
3.1查看资料
TCRT5000 传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和,此时模块的输出端为低电平,指示二极管被点亮。
其对应的原理图见下图,AO输出为红外循迹传感器直接输出的电压,所以为模拟量;DO为经过LM393进行电压比较后,输出高低电平,所以为数字量。
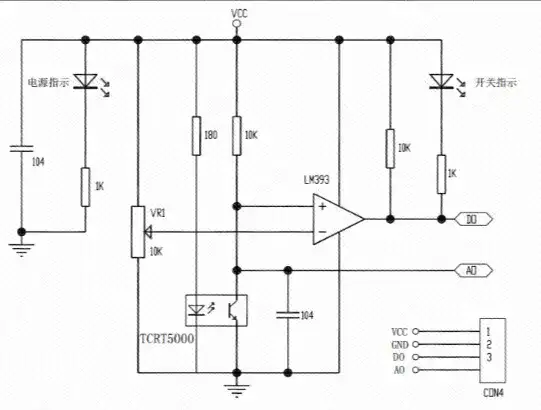
传感器原理图
因此DO引脚可以配置为GPIO的输入模式,AO引脚需要配置为ADC模拟输入模式。
3.2引脚选择
想要使用ADC,需要确定使用的引脚是否有ADC外设功能。可以通过手册进行查看。在用户手册439页。
这里选择使用PA5的附加ADC功能。
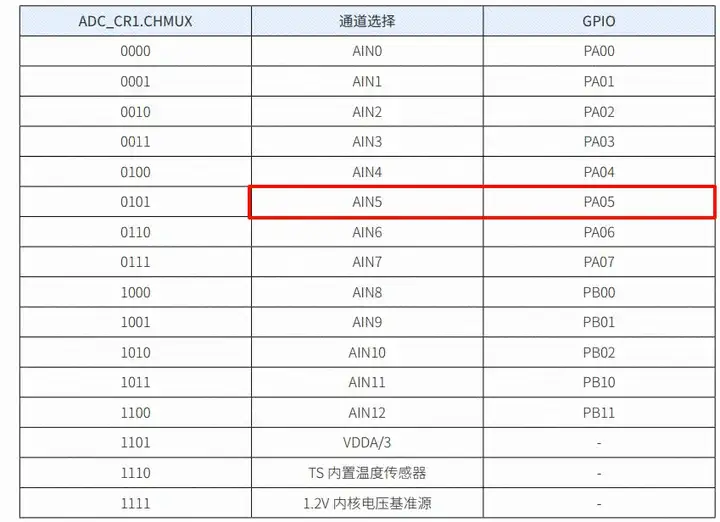
有ADC功能的引脚
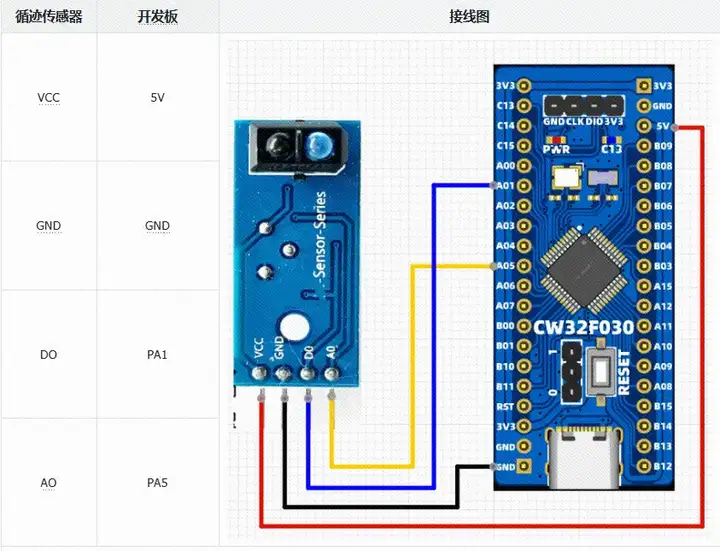
接线表
3.3移植至工程
移植步骤中的导入.c和.h文件与【CW32模块使用】DHT11温湿度传感器相同,只是将.c和.h文件更改为bsp_IRtracking.c与bsp_IRtracking.h。这里不再过多讲述,移植完成后面修改相关代码。
在文件bsp_IRtracking.c中,编写如下代码。
/* * Change Logs: * Date Author Notes * 2024-06-19 LCKFB-LP first version */ #include "bsp_IRtracking.h" #include "stdio.h" /****************************************************************** * 函 数 名 称:IRtracking_GPIO_Init * 函 数 说 明:红外循迹模块引脚初始化 * 函 数 形 参:无 * 函 数 返 回:无 * 作 者:LC * 备 注:AO引脚必须有ADC功能 ******************************************************************/ void IRtracking_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化结构体 RCC_IR_GPIO_ENABLE(); // 使能GPIO时钟 RCC_IR_ADC_ENABLE(); // 使能ADC时钟 GPIO_InitStruct.Pins = GPIO_IR_AO|GPIO_IR_DO; // GPIO引脚 GPIO_InitStruct.Mode = GPIO_MODE_INPUT_PULLUP; // 上拉输入 GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 输出速度高 GPIO_Init(PORT_IR, &GPIO_InitStruct); // 初始化 GPIO_ANALOG_ENABLE(); // PA05设定为模拟输入 /* ADC配置 */ ADC_InitTypeDef ADC_InitStructure; // ADC初始化结构体 ADC_WdtTypeDef ADC_WdtStructure; // ADC看门狗结构体 ADC_SingleChTypeDef ADC_SingleChStructure; // ADC单通道转换结构体 // 配置ADC初始化结构体 ADC_InitStructure.ADC_OpMode = ADC_SingleChOneMode; //单通道单次转换模式 ADC_InitStructure.ADC_ClkDiv = ADC_Clk_Div4; // 时钟频率 = PCLK / 4 = 64MHz / 4 = 16MHz ADC_InitStructure.ADC_SampleTime = ADC_SampTime5Clk; //5个ADC时钟周期 ADC_InitStructure.ADC_VrefSel = ADC_Vref_VDDA; //VDDA参考电压 ADC_InitStructure.ADC_InBufEn = ADC_BufDisable; //关闭跟随器 ADC_InitStructure.ADC_TsEn = ADC_TsDisable; //关闭内置温度传感器 ADC_InitStructure.ADC_DMAEn = ADC_DmaDisable; //不触发DMA ADC_InitStructure.ADC_Align = ADC_AlignRight; //ADC转换结果右对齐 ADC_InitStructure.ADC_AccEn = ADC_AccDisable; //转换结果累加不使能 //ADC模拟看门狗通道初始化 ADC_WdtInit(&ADC_WdtStructure); //配置单通道转换模式 ADC_SingleChStructure.ADC_DiscardEn = ADC_DiscardNull; // 单通道ADC转换结果溢出保存 ADC_SingleChStructure.ADC_Chmux = IR_ADC_CHANNEL; // 选择ADC转换通道 ADC_SingleChStructure.ADC_InitStruct = ADC_InitStructure; // ADC初始化结构体 ADC_SingleChStructure.ADC_WdtStruct = ADC_WdtStructure; // ADC看门狗结构体 ADC_SingleChOneModeCfg(&ADC_SingleChStructure); // 初始化配置 ADC_Enable(); //ADC使能 ADC_SoftwareStartConvCmd(ENABLE); //启动ADC转换 } /********************************************************** * 函 数 名 称:ADC_GET * 函 数 功 能:读取一次ADC值 * 传 入 参 数:无 * 函 数 返 回:测量到的值 * 作 者:LCKFB * 备 注: **********************************************************/ uint32_t ADC_GET(void) { ADC_SoftwareStartConvCmd(ENABLE); //启动ADC转换 uint32_t adcValue = ADC_GetConversionValue(); // 获取数据 return adcValue; } /****************************************************************** * 函 数 名 称:Get_ADC_Value * 函 数 说 明:对ADC值进行平均值计算后输出 * 函 数 形 参: * 函 数 返 回:对应扫描的ADC值 * 作 者:LC * 备 注:无 ******************************************************************/ unsigned int Get_ADC_Value(void) { unsigned char i = 0; unsigned int AdcValue = 0; /* 因为采集 SAMPLES 次,故循环 SAMPLES 次 */ for(i = 0; i < SAMPLES; i++) { /* 累加 */ AdcValue += ADC_GET(); } /* 求平均值 */ AdcValue = AdcValue / SAMPLES; return AdcValue; } /****************************************************************** * 函 数 名 称:Get_DO_Num * 函 数 说 明:读取传感器识别状态 * 函 数 形 参:无 * 函 数 返 回:1=识别为黑色 0=识别的不是黑色 * 作 者:LC * 备 注:可以通过模块上的可调电阻调整识别黑色的阈值 ******************************************************************/ unsigned char Get_DO_Num(void) { if( IR_DO == 1 )//识别为黑色 { return 1; } else//识别的不是黑色 { return 0; } }
在文件bsp_IRtracking.h中,编写如下代码。
/* * Change Logs: * Date Author Notes * 2024-06-19 LCKFB-LP first version */ #ifndef _BSP_IRTRACKING_H_ #define _BSP_IRTRACKING_H_ #include "board.h" #define RCC_IR_GPIO_ENABLE() __RCC_GPIOA_CLK_ENABLE() #define RCC_IR_ADC_ENABLE() __RCC_ADC_CLK_ENABLE() #define GPIO_ANALOG_ENABLE() PA05_ANALOG_ENABLE() // PA05设定为模拟输入 #define IR_ADC_CHANNEL ADC_ExInputCH5 #define PORT_IR CW_GPIOA #define GPIO_IR_AO GPIO_PIN_5 #define GPIO_IR_DO GPIO_PIN_1 #define IR_DO GPIO_ReadPin( PORT_IR, GPIO_IR_DO ) //采样次数 #define SAMPLES 30 void IRtracking_GPIO_Init(void);//初始化 unsigned int Get_ADC_Value(void);//读取AO值 unsigned char Get_DO_Num(void);//读取DO值 #endif
04移植验证
在自己工程中的main主函数中,编写如下。
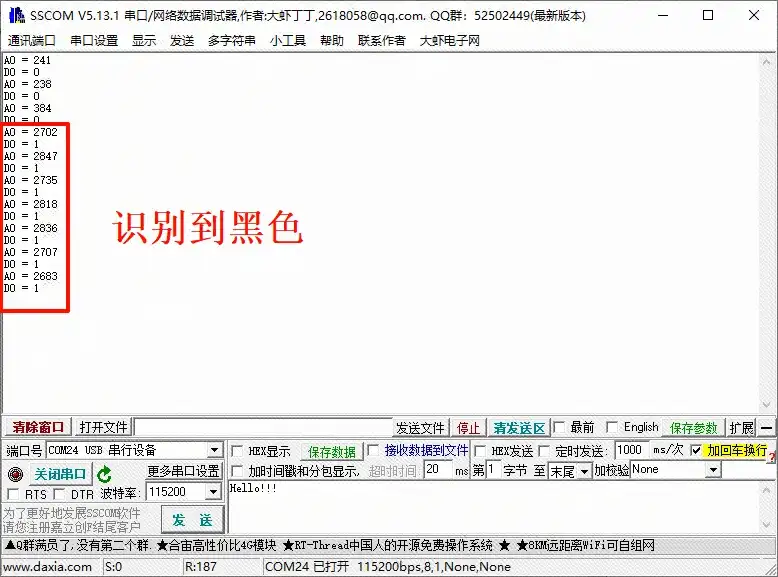
/* * Change Logs: * Date Author Notes * 2024-06-19 LCKFB-LP first version */ #include "board.h" #include "stdio.h" #include "bsp_uart.h" #include "bsp_IRtracking.h" int32_t main(void) { board_init(); // 开发板初始化 uart1_init(115200); // 串口1波特率115200 IRtracking_GPIO_Init(); printf("IRtracking demo startrn"); while(1) { printf("AO = %drn", Get_ADC_Value() ); printf("DO = %drn",Get_DO_Num() ); delay_ms(1000); } }
移植现象:输出AO值和DO值。
模块移植成功案例代码:
链接:https://pan.baidu.com/s/1fKt5ewsEwof8kme0Itvrng?pwd=LCKF
提取码:LCKF
审核编辑 黄宇
-
传感器
+关注
关注
2550文章
51000浏览量
752963 -
CW32
+关注
关注
1文章
203浏览量
625
发布评论请先 登录
相关推荐
CW32模块使用 人体红外传感器

【CW32模块使用】微波多普勒无线雷达传感器

【CW32模块使用】雨滴传感器
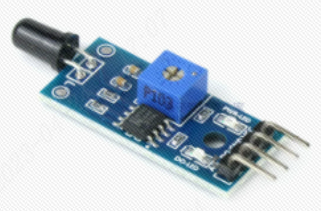
基于CW32模块的火焰传感器设计
CW32模块使用 MLX90614无接触测温传感器

【CW32模块使用】红外测距传感器

CW32模块使用 指纹识别传感器

【项目展示】基于CW32的遥控循迹小车



基于CW32的门禁综合系统

CW32单片机在智能马桶的应用介绍

CW32单片机在智能马桶的应用介绍
CW32单片机在智能马桶的应用介绍






 工商网监
工商网监
评论