 基于 onsemi NCV78343 & NCV78964的汽车矩阵式大灯方案
基于 onsemi NCV78343 & NCV78964的汽车矩阵式大灯方案
一、方案描述
大联大世平集团针对汽车矩阵大灯,推出 基于 onsemi NCV78343 & NCV78964的汽车矩阵式大灯方案。
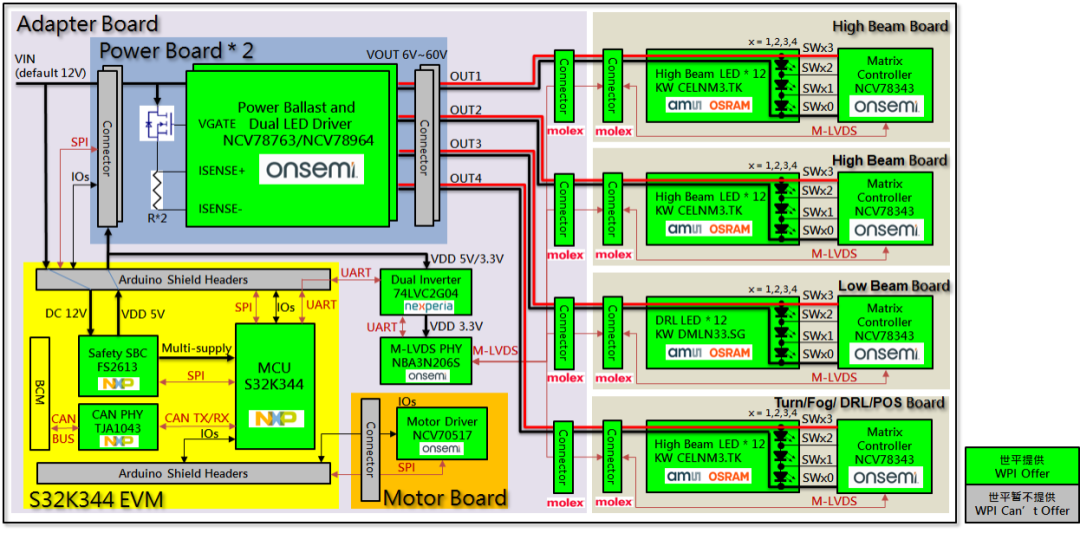
开发板搭载的主要器件有 onsemi 的 Matrix Controller NCV78343、LED Driver NCV78964、Motor Driver NCV70517、以及 NXP 的 MCU S32K344。
二、开发套件包括
1. S32K344 MCU 主控板 x 1: 采用WPI现有的 S32K344 MCU board 作为主控板, 板上采用车身域最广泛使用的 NXP S32K3 MCU 作为主控芯片, 搭配 FS26 电源安全芯片可满足各级别功能安全要求. MCU 主控板可依据终端客户本身需求自行替换, 或者选用 NXP S32K31 现有各类型开发板来进行矩阵大灯功能开发
2. NCV78343 LED 灯板 x 4: LED 灯珠控制采用 onsemi NCV78343 芯片, 可实现 1-12 个灯珠独立亮灭与 PWM 调光控制, 具开路, 短路与过压诊断保护
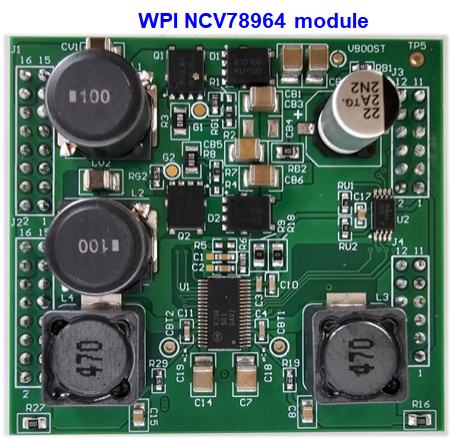
3. NCV78964 LED 驱动模块 x 2: 模块采用双相 Boost-Buck 架构的第四代大灯 LED 驱动芯片, 提供两路 Buck 输出, 每路可输出 60V/1.6A 供电LED灯串, 并具备 PWM 调光功能,
LED 驱动模块化设计的特点是:① 用户可根据自己选用的芯片自行设计 LED 驱动模块进行替换. ② 采用 onsemi 原厂现有提供的第二代芯片 NCV78763 模块. ③ 直接使用 WPI 提供的NCV78964 模块. 弹性的模块替换设计提供用户快速便利方式进行矩阵大灯应用布署与开发
4. MCU 转接控制板 x 1: MCU 控制与通信号透过此板连接到板上芯片, 并与 LED 驱动模块板, 灯板对等连接, 实现矩阵大灯功能, 界面为标准 Arduino UNO 接口, 可对接市面上各类型 MCU 开发板, 用户可以自行选用符合自己需求的 MCU 板来实现大灯功能
5. NCV70517 大灯转向步进电机控制板 x 1: 采用 onsemi NCV70517 来驱动双极步进马达,用来实现车头灯转向功能(Adaptive Frontlight System)
三、参考文献
[1] NCV78343.PDF
[2] NCV78964.PDF
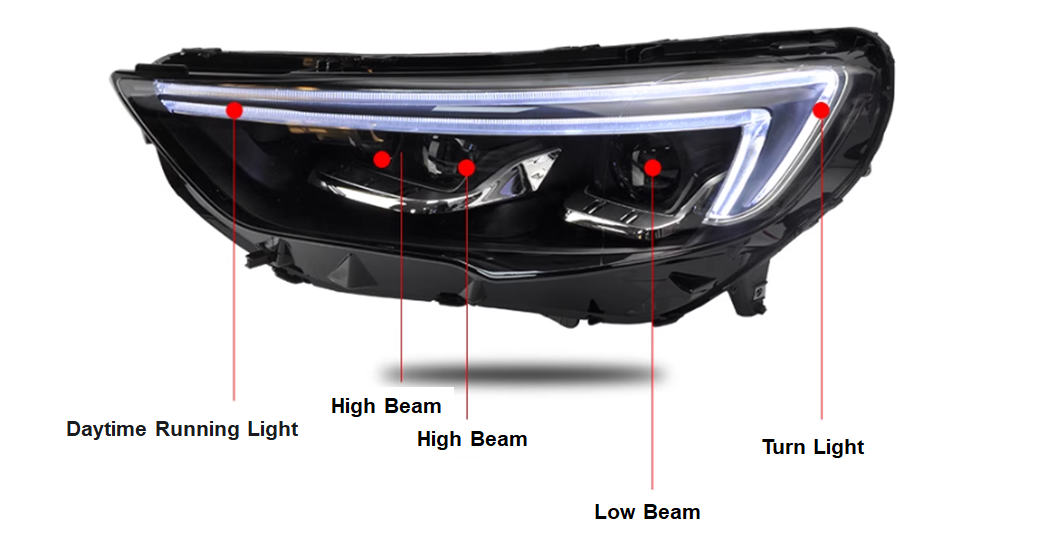
►场景应用图
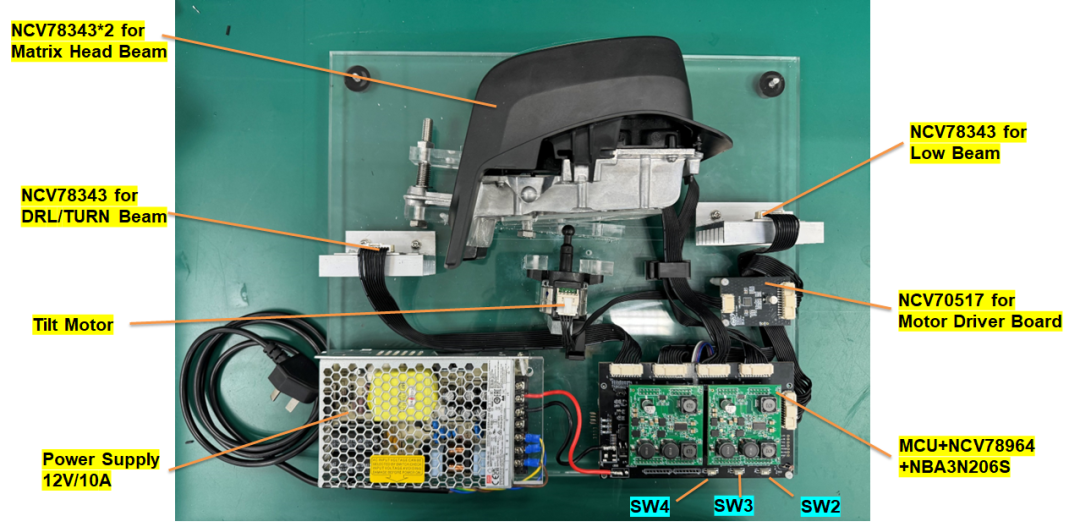
►产品实体图
►展示板照片
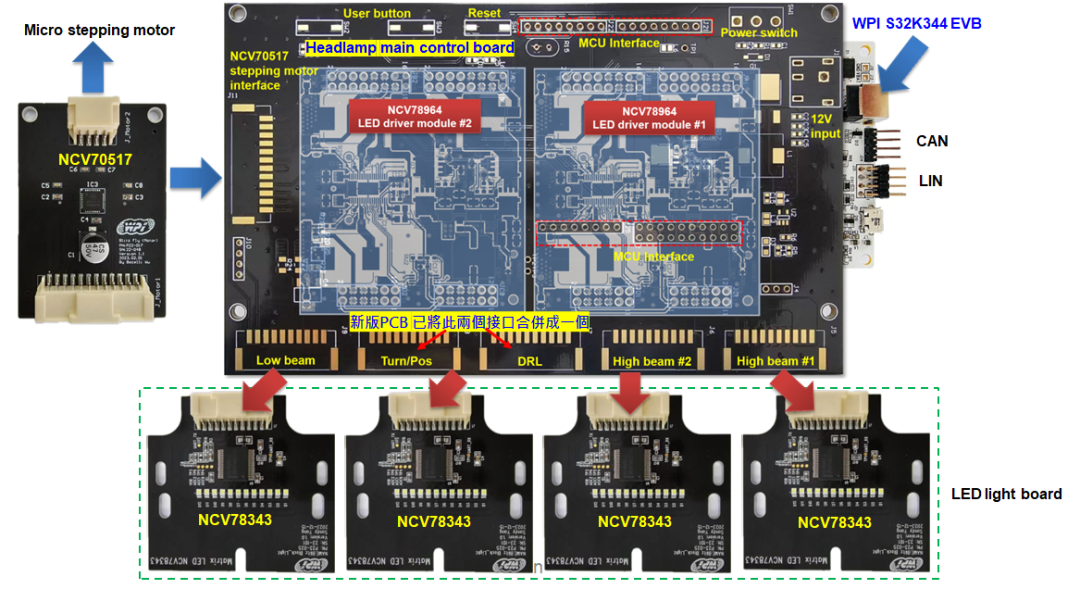
►方案方块图
►核心技术优势
1. NCV78343 可实现 1-12 个灯珠独立亮灭与 PWM 调光控制, 具开路, 短路与过压诊断保护
2. NCV78964 采用双相 Boost-Buck 架构,具备 PWM 调光功能
3. MCU 转接控制板界面为标准 Arduino UNO 接口, 可对接市面上各类型 MCU 开发板
4. 采用 onsemi NCV70517 来驱动双极步进马达,用来实现车头灯转向功能
►方案规格
软件:
1. S32K344 前照灯应用演示软件
2. NCV78964 和 NCV78763 驱动程序
3. NCV78343 驱动器
4. NCV70517 驱动器
技术支持:WPI 矩阵大灯平台用户使用手册,培训文档,软件开发手册等等
开发环境需求:
1. IDE: NXP S32DS 3.4.3 or S32DS 3.5.12
2. NXP S32K3 RTD 2.0.0
3. Debugger: PEMICRO multilink universal, Segger J-link, or WPI LPCLink
登录大大通搜索:基于 onsemi NCV78343 & NCV78964的汽车矩阵式大灯方案,查看原文,提问/评论,获取技术文档等更多资讯!
-
汽车大灯
+关注
关注
0文章
18浏览量
2931 -
汽车
+关注
关注
13文章
3493浏览量
37250 -
矩阵灯
+关注
关注
0文章
2浏览量
1356
发布评论请先 登录
相关推荐
北美运营商AT&T认证中的VoLTE测试项

北美运营商AT&amp;amp;T认证的费用受哪些因素影响

onsemi LV/MV MOSFET 产品介绍 &amp;amp; 行业应用

思瑞浦车规级产品矩阵,全面覆盖汽车级CAN&amp;amp;LIN、LDO需求

FS201资料(pcb &amp; DEMO &amp; 原理图)
北美运营商AT&amp;amp;T认证入库产品范围名单相关
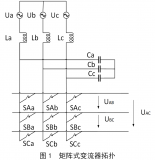
矩阵式变频驱动技术的基本原理
解读北美运营商,AT&amp;amp;T的认证分类与认证内容分享
Open RAN的未来及其对AT&amp;T的意义
小鹏汽车宣布与阿联酋经销商集团Ali&amp;Sons建立战略合作伙伴关系

R&amp;S基于Analog Devices的技术打造无线电池管理系统生产测试解决方案

矩阵式变换器的拓扑结构和工作原理 矩阵式变换器的控制策略和仿真分析





 工商网监
工商网监
评论