 华为智能驾驶发展路径探讨
华为智能驾驶发展路径探讨
随着全球科技的迅速发展,汽车产业正经历着从机械化向智能化的发展转型,而智能驾驶技术则是这一变革的核心推动力。全球各大汽车制造商和科技公司纷纷布局智能驾驶,希望在未来出行领域抢占市场先机。据麦肯锡预计,中国未来很可能成为全球最大的自动驾驶市场,至2030年,自动驾驶相关的新车销售及出行服务创收将超过5000亿美元。自动驾驶汽车的普及率必然大幅上升,这也预示着未来出行模式将会发生根本性变革。华为作为信息通信技术领域的领军企业,凭借其在通信、云计算和人工智能(AI)方面的技术积累,迅速切入了智能驾驶领域。自2021年发布ADS 1.0以来,华为通过持续的技术迭代和优化,推出了更为先进的ADS 2.0和ADS 3.0,逐步确立了其在全球智能驾驶领域的竞争优势。
华为ADS的发展历程:从1.0到3.0的技术演进
华为的智能驾驶系统ADS自2021年问世以来,经历了三次重大版本迭代,每个版本的技术演进都反映了华为在智能驾驶领域的创新与突破。从ADS 1.0依赖高精地图的“有图”方案到ADS 2.0的“无图”自主驾驶,再到ADS 3.0引入端到端大模型,华为ADS系统的每一次升级都带来了技术上的质变。通过不断优化传感器融合技术、提升系统算力和算法精度,华为ADS系统在自动驾驶的安全性、稳定性和成本控制方面取得了显著进步。
 华为ADS历史版本特性
华为ADS历史版本特性
1.1ADS 1.0:多传感器融合与高精地图依赖
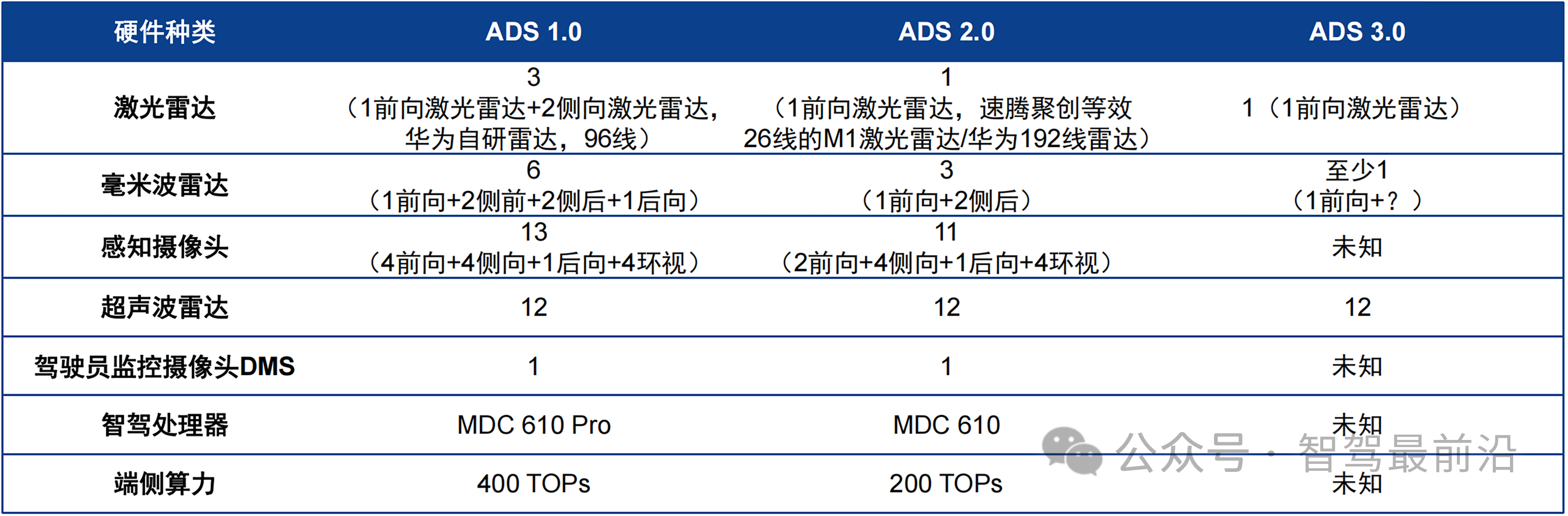
2021年发布的ADS 1.0是华为进入智能驾驶市场的起点。该版本采用了多传感器融合方案,包括激光雷达、毫米波雷达、摄像头等设备的组合,依赖高精地图实现车辆的路径规划和障碍物检测。ADS 1.0的技术核心在于传感器数据的融合,车辆通过采集周围环境信息进行实时分析,从而为驾驶员提供驾驶辅助功能。l高精地图依赖:ADS 1.0高度依赖高精地图进行路径规划,这意味着车辆需要提前获取城市或道路的高精地图数据。这种技术方案在一些特定城市(如上海、广州等)能够实现较为稳定的自动驾驶功能,但在城市拓展性方面存在局限性。l硬件配置:ADS 1.0采用了较为高配的硬件配置,包括3个激光雷达、6个毫米波雷达和13个摄像头。这一组合提供了丰富的环境感知能力,但也使得系统硬件成本居高不下。l技术挑战:高精地图的覆盖和更新成本较高,特别是在新兴城市或新建道路中,地图更新滞后会导致车辆无法获取准确的道路信息。此外,复杂硬件配置也增加了系统的维护难度和成本。
1.2ADS 2.0:自主感知与无图驾驶的突破
ADS 2.0于2023年4月发布,带来了重大技术突破,其最大的亮点在于“无图驾驶”。华为通过自主感知技术和路径规划算法,使车辆能够在没有高精地图的情况下自主识别车道、障碍物及周围环境,从而实现智能驾驶。ADS 2.0标志着华为在智能驾驶技术领域从依赖外部数据到完全自主感知的跨越,华为ADS 2.0在2023年Q2已实现深圳、上海、广州、重庆、杭州的城区NCA落地,并在2024年春节之前实现了无图智驾城区NCA对M5M7智驾版用户的全量推送,2024年3月实现了对问界M9的全量推送。
GOD算法:ADS 2.0采用了GOD(Generalized Occupancy Network)算法,通过将外界环境划分为多个立方体,并判断每个立方体的占用状态,系统能够实时生成精确的环境模型。这种算法极大地提高了系统在复杂城市环境中的泛化能力。
无图驾驶的实现:无图驾驶意味着ADS 2.0不再依赖高精地图进行导航和路径规划,而是通过传感器采集到的实时数据和GOD算法进行自主决策。这一技术的突破大大降低了自动驾驶系统对地图更新的依赖,并且使车辆在任何复杂或未知的环境中都能安全运行。
硬件优化:ADS 2.0进一步优化了硬件配置,激光雷达数量从3个减少到1个,毫米波雷达数量从6个减少到3个,摄像头也从13个减少到11个。这种优化在降低硬件成本的同时,依然保证了系统的感知能力和稳定性。
1.3ADS 3.0:端到端大模型的应用
2024年,华为发布了最新的ADS 3.0版本,进一步提升了智能驾驶系统的感知和决策能力。ADS 3.0引入了端到端大模型架构,有别于特斯拉所宣传的“大一统”模型,华为ADS采用感知+决策分层的GOD+PDP架构,这使得系统能够在不同场景下进行自主感知、决策和路径规划,并实现复杂环境中的智能驾驶。
端到端大模型:ADS 3.0的技术核心在于端到端大模型。通过大规模数据训练,系统能够从传感器输入中直接生成决策和路径规划结果,简化了传统的分阶段处理流程。这一技术显著提升了系统的智能化程度和实时响应能力。
车位到车位的全自动驾驶:与ADS 2.0主要适用于城市道路和高速公路不同,ADS 3.0进一步扩展了功能,支持从停车位到停车位的全自动驾驶,包括自动泊车和复杂环境中的自主导航。
硬件配置:从繁杂到简化的技术优化
智能驾驶系统的性能在很大程度上依赖于硬件配置。华为在ADS系统的发展过程中,通过对传感器配置的优化,实现了从高成本的复杂硬件组合到性能优异的精简方案的转变。通过逐步减少传感器数量、提升硬件性能,华为成功降低了系统的整体成本,并提升了传感器融合的效率。
2.1多传感器融合的必要性与优势
多传感器融合是智能驾驶系统感知环境的关键技术。单一传感器难以应对复杂多变的驾驶环境,特别是在不同光照条件或恶劣天气下,不同类型的传感器具有各自的优缺点,因此必须通过融合技术来实现全面感知。
 华为多传感器融合方案
华为多传感器融合方案
激光雷达:激光雷达通过发射激光束并计算返回的时间差来生成三维环境图像。它的主要优势在于高精度、长距离感知,适用于光线较好且无遮挡的场景,生成的环境模型精确且稳定。
毫米波雷达:毫米波雷达在极端天气和夜间表现优异,它通过电磁波探测物体的距离、速度和角度。毫米波雷达的探测范围较激光雷达广,尤其在夜晚或雾天等条件下,毫米波雷达能够补充激光雷达的感知盲区。
摄像头:摄像头主要用于捕捉车辆周围的图像信息,能够识别车道线、障碍物、行人等细节信息。摄像头与激光雷达、毫米波雷达的融合显著提升了系统的综合感知能力。
2.2从高配到精简:传感器配置的优化历程
ADS 1.0采用了多达3个激光雷达、6个毫米波雷达、13个摄像头及12个超声波雷达的配置,确保了系统具备较高的环境感知能力。然而,这种高配方案导致了硬件成本的上升,增加了整车的制造成本和系统复杂性。为了解决这一问题,ADS 2.0和ADS 3.0逐步减少了传感器数量,并通过传感器的性能优化来弥补数量的减少。
 华为历代ADS硬件方案
华为历代ADS硬件方案
激光雷达的减少:从ADS 1.0的3个激光雷达到ADS 2.0和ADS 3.0的1个激光雷达,虽然传感器数量减少,但华为通过技术提升增加了单个激光雷达的覆盖范围和分辨率,使其感知效果更加出色。
毫米波雷达和摄像头的优化:在ADS 2.0中,华为的毫米波雷达和摄像头也得到了进一步优化。3个毫米波雷达与11个摄像头的组合依然能够提供全面的环境感知能力,并且显著降低了系统的整体硬件成本。
2.3激光雷达的技术进步与成本下降
激光雷达作为智能驾驶系统中最昂贵的传感器之一,其技术进步和成本下降对行业有着重大影响。在ADS 2.0中,华为采用了192线激光雷达,这相比96线激光雷达显著提升了分辨率和扫描频率。激光雷达的分辨率越高,车辆对周围环境的感知精度也越高,能够有效提升自动驾驶的安全性与准确性。此外,随着技术的成熟,激光雷达的制造成本也在逐步下降。以速腾聚创为例,其激光雷达价格从2021年的1万元降至2024年的2600元,这大幅降低了智能驾驶系统的硬件成本,使激光雷达成为大规模商用的可行方案。
2.4毫米波雷达的创新与4D成像
毫米波雷达在ADS系统中发挥了关键作用,特别是在低能见度的条件下,它能够准确识别周围物体的距离、速度和方位。ADS 1.0阶段使用的3D毫米波雷达在探测距离上表现出色,但无法提供物体的高度信息。在ADS 2.0和ADS 3.0中,华为推出了4D毫米波雷达,不仅能够探测物体的二维平面信息,还能够提供物体的高度数据,从而生成更加完整的环境模型。4D毫米波雷达的成像效果接近激光雷达,但成本却低得多。因此,4D毫米波雷达的引入大幅提升了ADS系统的性价比,使其在恶劣天气下依然能够保持较高的环境感知能力。
算法架构:从人工标注到自主决策
在智能驾驶系统中,算法架构是决定车辆如何从感知数据中提取有效信息、做出实时决策的核心因素。华为ADS系统的算法架构经历了从BEV的人工标注、GOD的自主感知,再到ADS 3.0的端到端大模型的逐步升级。每次迭代都标志着华为在智能驾驶算法方面的重大突破,使得系统在感知精度、实时决策和路径规划方面的性能大幅提升。
3.1BEV算法:鸟瞰视角的初步感知
ADS 1.0阶段,华为采用了BEV(Bird's Eye View,鸟瞰视角)算法,该算法通过多传感器融合,将车辆周围环境的数据以三维的方式呈现。车辆通过这一视角进行障碍物识别和路径规划,能够实现较为精准的驾驶辅助功能。然而,BEV算法依赖人工标注的高精地图,这在动态变化的城市环境中存在局限性,特别是在高精地图更新速度较慢的情况下,车辆的路径规划和环境感知能力可能受到影响。
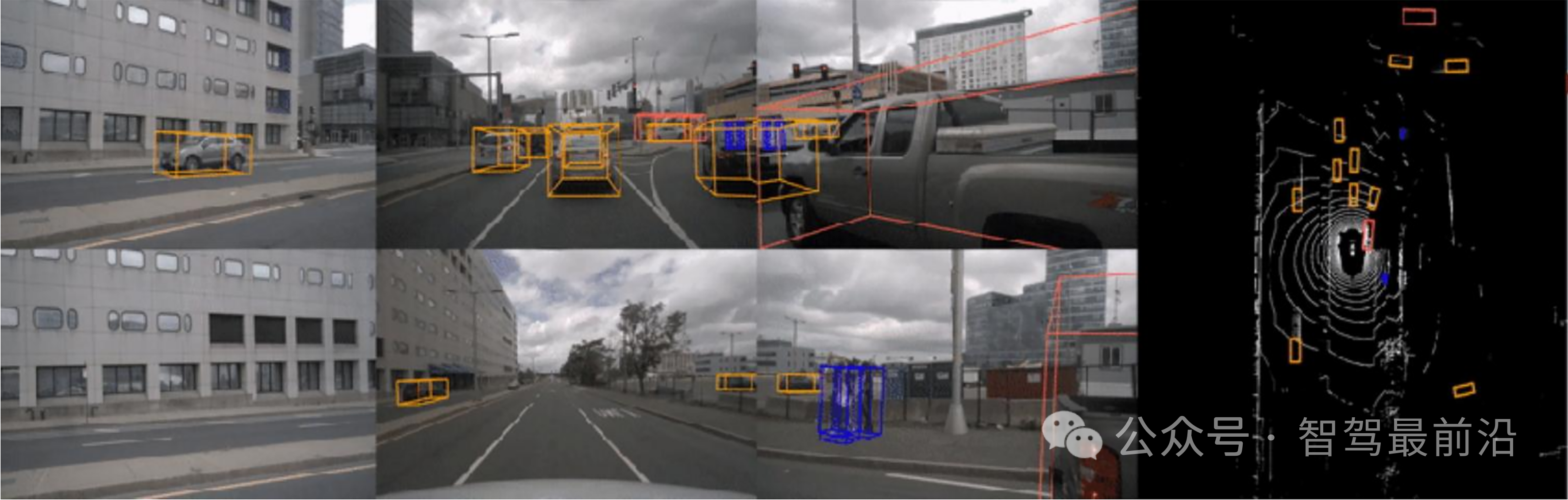 BEV输入及输出示意图
BEV输入及输出示意图
3.2GOD算法:无图驾驶的自主决策
在ADS 2.0中,华为引入了GOD(Generalized Occupancy Network)算法,极大地提升了系统的自主决策能力。GOD算法通过将环境划分为多个小立方体(occupancy grid),并判断每个立方体是否被占用,进而生成一个动态的环境模型。这一算法不再依赖人工标注的高精地图,而是通过实时数据感知环境的变化,并根据道路状况做出自主决策。相比BEV算法,GOD算法大幅提升了系统在复杂城市环境中的泛化能力和适应性。特别是在路况复杂、交通环境多变的城市,GOD算法能够实时识别障碍物、行人、其他车辆等,并自主规划最优路径,极大提升了系统的灵活性。
3.3端到端大模型:深度学习驱动的智能决策
ADS 3.0标志着华为在智能驾驶算法领域的又一次飞跃。与传统的模块化算法不同,ADS 3.0通过引入端到端大模型,实现了从传感器输入到感知、决策、规划的全面一体化。端到端大模型的核心是基于深度学习的算法架构,系统能够通过大量的驾驶数据进行训练,逐步提升其对复杂环境的适应性和自学习能力。端到端大模型的应用不仅提升了系统的计算效率,还使得系统能够在不同的场景下进行更为精准的决策。这一技术突破显著提升了ADS系统的智能化水平,使其在自动驾驶的实时性和响应能力方面达到了新的高度。
算力优化:精准与高效的平衡
智能驾驶系统的算力需求直接影响其处理速度、决策能力和系统功耗。华为ADS系统在算力配置上经历了从超配到精准的优化过程,通过MDC(Mobile Data Center)计算平台的逐步升级,华为实现了智能驾驶系统的算力优化,既提升了系统性能,又降低了不必要的功耗和硬件成本。
4.1MDC计算平台:从高算力到双版本方案
ADS 1.0阶段,华为采用了自研的MDC 610 Pro计算平台,支持400 TOPS的算力,以满足L3级别及更高阶的自动驾驶需求。然而,实际应用中,这种超高的算力配置并未被充分利用,特别是在L2+级别的自动驾驶场景中,算力冗余带来了不必要的功耗和成本增加。

为了优化算力配置,ADS 2.0将算力调整至200 TOPS,满足L2+级别智能驾驶需求,同时大幅降低了系统的功耗。到ADS 3.0阶段,华为进一步引入了“高+低”双版本算力方案,MDC 610平台用于日常驾驶场景,而MDC 810平台则为未来更高阶自动驾驶提供预留空间。这一策略不仅优化了成本,还提升了系统的可扩展性。
4.2算力冗余的解决与优化
算力冗余是自动驾驶系统中普遍存在的问题,特别是在L2和L3级别的驾驶场景中,超高的算力往往会导致不必要的功耗增加。华为通过对MDC平台的算力优化,成功解决了这一问题。ADS 2.0和ADS 3.0通过调整算力配置,使系统更加贴近实际需求,避免了因冗余算力带来的功耗问题,从而进一步提高了系统的稳定性和可靠性。
智能驾驶生态:多元化合作模式与市场扩展
智能驾驶技术的成功不仅依赖于技术突破,还需要一个完整的产业生态系统作为支撑。华为通过与多家车企的合作,逐步构建了以智能驾驶为核心的多元化生态体系。通过零部件供应、Huawei Inside模式(HI模式)以及智选车模式,华为与国内外车企建立了深度合作关系,推动了智能驾驶技术的应用和普及。
5.1合作模式的多样化与成功案例
华为通过以下三大合作模式与车企建立了紧密的合作关系:
零部件供应模式:华为向车企提供智能驾驶相关的零部件,如传感器、计算平台等,帮助车企提升其智能驾驶系统的整体性能。
Huawei Inside模式(HI模式):通过提供完整的智能驾驶解决方案,华为与车企共同研发智能汽车,深度参与汽车制造过程。
智选车模式:华为不仅参与汽车的设计和研发,还通过其渠道帮助车企进行市场推广和销售。
这些合作模式已经在比亚迪、北汽、上汽、吉利等多家知名车企中成功应用。特别是在问界M5、M7等车型上,ADS系统的高阶版本得到了广泛的用户认可,用户选择ADS高阶包的比例已达到70%,这证明了华为智能驾驶技术的市场竞争力和商业化潜力 。
5.2市场数据与扩展前景
截至2023年,华为ADS系统的市场装配量显著增长,特别是在国内市场,华为与国内多家车企的合作使其ADS系统得到了大规模应用。根据行业数据显示,2023年华为ADS系统的销售额超过30亿元,车BU(业务单元)接近盈亏平衡,标志着华为智能驾驶业务的商业化进程取得了显著成功。
结论与展望
通过对华为智能驾驶ADS系统的技术演进、硬件优化、算法创新及生态合作的全面分析,可以看出,华为在智能驾驶领域已经取得了显著的技术突破。ADS系统的每一次迭代都展示了华为在传感器融合、算力优化、算法架构等方面的创新,并通过不断优化硬件配置,降低了系统的整体成本,提升了市场竞争力。然而,智能驾驶技术的普及仍然面临着诸多挑战,包括技术标准的制定、车辆行驶安全性问题以及政策法规的限制等。未来,随着自动驾驶技术的逐步成熟,华为ADS系统将进一步扩展其市场份额,并通过与车企的合作,推动智能驾驶生态的构建。华为有望在全球智能驾驶市场中继续保持领先地位,但同时也需要持续应对技术挑战与市场竞争,确保其技术优势的长期保持。
参考文献:
华金证券:华为智能驾驶方案分析
「智驾最前沿」微信公众号后台回复:C-0537,获取:华为智能驾驶方案分析pdf下载方式。
审核编辑 黄宇
-
华为
+关注
关注
216文章
34473浏览量
252019 -
智能驾驶
+关注
关注
3文章
2534浏览量
48798
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论