 从小鹏M03自动泊车撞上奥迪聊聊智驾现状
从小鹏M03自动泊车撞上奥迪聊聊智驾现状
最近有一位网友在微博上发文称,在使用小鹏MONA M03自动泊车功能时,撞到了别人的车,其中特别强调了在自动泊车过程中,已经检测到了对方车辆,但还是直直地往对方车辆上撞,并表示之前也体验过很多品牌的自动泊车功能,太信任这个功能了,根本不相信这种基础功能还会出问题。
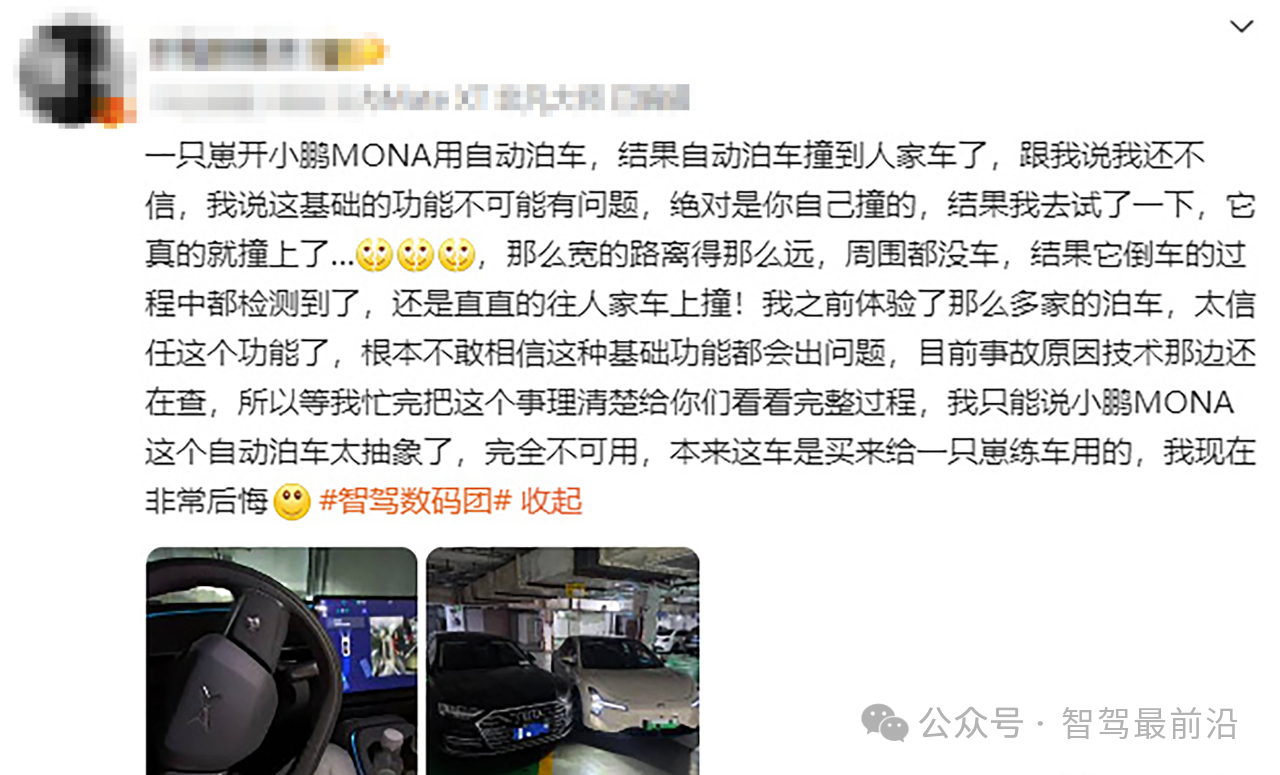

此事在网络发酵后,获得了众多网友的热烈讨论,对此小鹏汽车相关负责人回应媒体称:公司售后同学已经联系上客户,在积极处理解决中。关于自动泊车状态下发生车辆剐蹭的原因。该名负责人回应,不排除因光线及其他因素导致的弱势场景,具体原因还要结合具体的数据进行分析。此事件不仅让人们对自动驾驶技术的安全性产生了疑虑,也引发了关于当前智能驾驶技术现状及未来发展的深思。近年来,自动驾驶技术取得了显著进展,从初级的驾驶辅助功能到高级别的自动驾驶,技术不断成熟。然而,尽管在技术层面取得了诸多突破,自动驾驶系统在实际应用中的表现仍然存在一定的不确定性。以小鹏MONA M03的自动泊车功能为例,这类功能已经被视为相对成熟的自动驾驶应用之一,但此次事故表明,技术在某些情况下仍可能无法应对复杂或弱势场景。自动泊车功能依赖于多传感器融合技术,包括超声波雷达、摄像头和有时配备的激光雷达,这些传感器共同工作以感知车辆周围的环境。通过实时处理这些传感器收集的数据,车辆能够计算出最佳的停车路径,并自动控制转向、加速和制动,以完成泊车操作。然而,传感器的有效性和可靠性是自动泊车成功的关键。例如,超声波雷达的检测范围和精度在不同光线条件下可能会有所变化,摄像头在低光环境中的表现也可能受到影响。此次事故中,小鹏汽车的自动泊车系统可能由于光线不足或传感器检测精度下降,未能正确感知周围环境,导致车辆与障碍物发生碰撞。由此可见自动驾驶技术虽然在迅速发展,但仍旧无法确保完全可靠,尤其是在低速复杂环境中,传感器的感知能力和算法的决策能力可能会受到多种因素的影响。
环境感知的局限性:传感器的精度和覆盖范围是自动驾驶系统感知环境的基础。低光照、强反光、复杂障碍物等情况可能会导致传感器无法正确感知,从而影响系统的决策。
算法的复杂性:自动驾驶系统依赖复杂的算法来处理大量的传感器数据,并作出实时决策。然而,算法的设计和实现需要考虑到无数的边缘场景和异常情况,这对系统的可靠性提出了极高的要求。
数据的不足与质量:自动驾驶技术的发展高度依赖于海量高质量的数据。然而,获取和标注这些数据的过程不仅昂贵且耗时,而且在某些情况下,特定场景的数据可能不足,导致算法在这些场景下的表现不佳。
系统整合与测试:即便是单个传感器或算法表现良好,将这些技术集成到一个全面的自动驾驶系统中仍然面临巨大的挑战。系统的整合需要确保各个组件能够无缝协作,并在各种情况下都能保持稳定。
自动驾驶技术的进一步发展,仍需要在多个方面进行改进和优化:
多传感器融合与冗余设计:为应对复杂的驾驶环境,自动驾驶系统应当采用多传感器融合技术,确保在单一传感器失效或性能下降时,系统仍能正常工作。此外,增加冗余设计,提高系统的容错能力,可以进一步提升自动驾驶的安全性。
提升算法的鲁棒性:针对弱势场景和边缘情况,自动驾驶算法需要不断优化。通过大规模的仿真测试和真实场景数据的积累,算法可以在更广泛的条件下保持稳定的表现。
增强实时数据处理能力:随着自动驾驶系统对数据量的需求不断增加,系统需要具备更强的实时数据处理能力,以确保在复杂环境下的实时决策。
用户教育与预期管理:在自动驾驶技术尚未完全成熟之前,汽车制造商应加强对用户的教育,帮助他们理解自动驾驶系统的能力与局限性,并正确设定对系统的预期。这样可以减少因误解而导致的不必要风险。
此次事故提醒我们,随着技术的不断完善和系统的全面优化,自动驾驶将必然会成为更加安全、可靠的出行选择。然而,在中间的过渡阶段,制造商和用户都需要认识到技术的局限性,慎重使用!
-
智能驾驶
+关注
关注
3文章
2433浏览量
48612 -
自动驾驶
+关注
关注
782文章
13643浏览量
166024 -
小鹏汽车
+关注
关注
4文章
513浏览量
14703
发布评论请先 登录
相关推荐
从小鹏、理想、蔚来布局看自动驾驶发展趋势
小鹏MONA M03新规划:明年二季度集成天玑系统
智驾仿真测试实战之自动泊车HiL仿真测试

小鹏自研芯片,终于发布!
小鹏自研图灵芯片震撼登场:流片成功性能超越行业旗舰
消息称小鹏汽车自研智驾芯片流片成功
今日看点丨小鹏自研芯片流片!算力是同行三倍;加拿大将对中国电动汽车征收100%关税

小鹏汽车与滴滴合作深化,MONA M03量产启航
宏景智驾自动泊车2.0系统征服高难度车位
小鹏MONA M03全球首发:携手滴滴,共绘A级纯电轿跑新篇章
S1C17M02、M03专为数字万用表设计
小鹏汽车智驾总里程假期5天超1800万公里
自动泊车和遥控泊车的区别
智驾、座舱、泊车三合一域控制器解析






 工商网监
工商网监
评论