 凤凰动力资深工程师必须了解的AGV/AMR硬件组成部分
凤凰动力资深工程师必须了解的AGV/AMR硬件组成部分
AGV(Automated Guided Vehicle,自动导引车)和AMR(Autonomous Mobile Robot,自主移动机器人)虽然在智能化程度上有显著区别,但它们在硬件组成部分上有很多共性,主要包括以下几个关键部分:
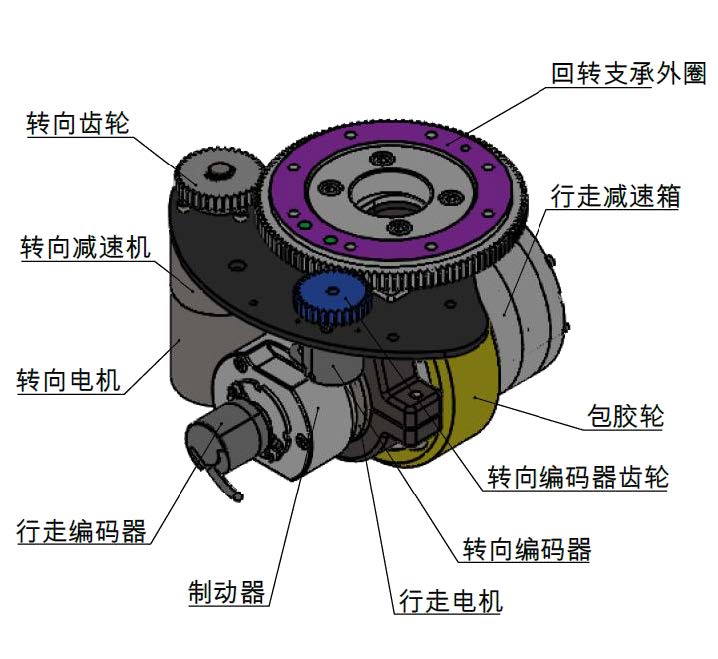
1.驱动装置:通常包含电动机、减速器、制动器和速度控制器,这些组件共同作用来驱动AGV/AMR的车轮或履带,确保其能够按照预定路线或者自主规划的路径进行移动。
2.导航系统:AGV可能使用磁条、光学引导、激光引导、二维码等预设路径导航方式。
AMR更倾向于采用SLAM(Simultaneous Localization and Mapping,同步定位与建图)技术,通过激光雷达、视觉传感器或其他类型的传感器构建环境地图,并实时进行自身定位和路径规划。
3.传感器:包括但不限于激光雷达、摄像头、超声波传感器、红外传感器等,用于环境感知、避障和物体识别,特别是AMR依赖这些传感器实现高度的自主性和灵活性。
4.车载控制器:车辆控制系统在叉式AGV中使用的是舵轮电机,具有行走和转弯两种功能,货叉的提升动作有油泵电机和控制器来完成;潜伏式AMR多使用差速轮,利用两侧车轮的速度差来完成直行和旋转的动作。这是AGV/AMR的核心部件之一,负责处理传感器数据,执行路径规划算法,控制机器人的运动和任务操作。
5.能源系统:大多数现代AGV/AMR采用锂电池供电,确保长时间连续工作和便捷的充电管理。
6.通信模块:通讯系统用于AGV/AMR与上位系统交互通讯,包括无线通讯模块和操控面板等,目前主要有5G和wifi两种方式,用于与中央管理系统、其他机器人或生产设备进行无线通信,实现任务分配、状态报告和协同作业。
7.机械结构:包括承载平台、举升机构(如在叉式移动机器人中)、转向装置等,满足物料搬运、装配等不同应用场景需求。
8.安全防护装置:安全防护系统包括安全传感器、光电开关、安全护边、急停按钮、声光报警、碰撞检测传感器等,最大程度地保证车辆安全、货物安全和人员安全,特别是在人车混行的场合中,确保机器人在遇到突发状况时能迅速停止以保证人员和设备的安全。
综上所述,无论是AGV还是AMR,其硬件组成部分都是为了支持其基本的移动功能、导航能力、感知环境变化、智能决策以及安全可靠地执行搬运任务。随着技术的发展,AMR在硬件配置上越来越注重计算能力和自主导航性能的提升。
作为AGV/AMR行业资深的电驱动专家,凤凰动力融合了电驱动(舵轮、驱动轮)、伺服技术(inagv)、专用脚轮(重步)、驱动控制程序及高精密齿轮传动(Miestype)等多元化领域的专业优势。通过旗下品牌间的深度整合与协同,我们提供一站式的AGV车辆解决方案,旨在推动物流自动化领域的创新发展。

审核编辑 黄宇
-
AMR
+关注
关注
3文章
440浏览量
30394 -
AGV
+关注
关注
27文章
1343浏览量
41313
发布评论请先 登录
相关推荐


凤凰动力AGV舵轮安装与调试

嵌入式系统的硬件组成部分
凤凰动力AGV舵轮大揭秘!
凤凰动力告诉你,为什么要用AGV专用脚轮
凤凰动力为你详解AGV舵轮的工作原理
凤凰动力-AGV差速驱动轮的工作原理

嵌入式软件工程师和硬件工程师的区别?






 工商网监
工商网监
评论