 快速读懂工业机器人与plc的绝对关系
快速读懂工业机器人与plc的绝对关系
作为初学者,出现这类问题是比较常见的,慢慢的看完下面这篇通俗易懂的文章,大家大概就能懂工业机器人与plc的绝对关系。
我们先来了解一下工业机器人的基本结构和原理,工业机器人的硬件结构简单地讲一般是由3-6台伺服驱动系统协作来完成各种各样的动作,而控制工业机器人本质上就是控制那几个电机正转、反转、转快点或者转慢点,这个我相信大家都是可以理解的。
那么学过电气控制的人都明白,为了控制这几个电机按你的意思动作,自然就需要一个类似于PLC的设备作为一个控制平台,给你编写程序,一个类似于触摸屏的人机界面用来发号施令。这里的"PLC"就是机器人的集成控制器,"触摸屏"就是示教器了。
实际上,在整个工业机器人产业,机器人本体的价值大致占到了1/3,那么另外的2/3去了哪里?
这2/3主要是机器人周边的集成设备和工业软件占据了。众所周知,工业机器人越来越像是一个标准件,要想把工业机器人按照现场实际灵活的运用起来,就需要周边设备和工业软件的配合参与了,工业机器人不是孤立工作的,一个机器人工作站,往往需要外围设备的配合,比如工装夹具、传送带、焊接变位机、移动导轨等等,这些角色相互之间要怎么配合,需要PLC进行协调。
而一个生产线又需要多个工业机器人工作站协作,而且生产线还包括其他相对独立的自动化设备,比如AGV小车、自动化立体仓库、喷涂设备、装配设备等等。这个时候工作站与工作站之前就需要更高一层的PLC来进行协调。
举个最简单的例子:
一条输送生产线,在A,B,C三个位置有三个工业机器人工作站,代表三个工位需要进行三种工艺操作,PLC首先控制传送带运动,工件到达工位A,工位A的位置传感器检测到工件到位了,发送信号给PLC,PLC接收到此输入信号,同时综合其他一些外部信号判断此时工位A的机器人可以开始工作了,则通过PLC输出发送一个信号给机器人A:丫你可以开始干活了,赶紧的。机器人A干完活后,再反馈一个完成信号给PLC:兄弟我的活干完了,你继续。PLC接受此信号后继续开动电机控制传送带把工件运到工位B,重复以上逻辑过程。
各位看官,看完上面的这段话,我想您的疑问至少解决一半了。现在到了该下结论的时候,那就是工业机器人的应用离不开PLC的参与,而且今后在工业机器人行业真正有所作为的领域是个性化的工业机器人解决方案,所以学习工业机器人技术仅仅会操作使用,那你只是一个操作技工而不是应用工程师!对于新进入或者跨行进入的工业机器人学习者,最好要有电气自动化的基础理论,如果没有电气基础那就必须从基本的电工电路以及PLC编程开始学了。
>>>机器人是如何与PLC通讯连接的?
工业机器人真正的应用是用在生产线上(如汽车组装生产线、半导体硅片搬运等),机器人单机各种搬运动作轨迹等都调试好了,还要配合生产线上的动作要求,也就是还要和PLC连接进行通讯,双方交互信号,PLC什么时候让机器人去搬运,机器人搬运完成通知PLC,通过这样的交互通讯,机器人即可作为整条生产线上的“一员”,和生产线的上的其他机构完成整个生产任务。
>>>工业机器人与PLC的通讯连接
如果我们既掌握了工业机器人的编程,又掌握了PLC的 控制技术,那么通过PLC控制机器人就显得非常简单了。只要将工业机器人和PLC有效地连接起来并进行相互之间的信号传输即可。工业机器人与PLC之间的通讯传输有“I/O”连接和通讯线连接两种,下面以最常用的机器人与PLC之间使用“I/O”连接的方式介绍其控制方法。
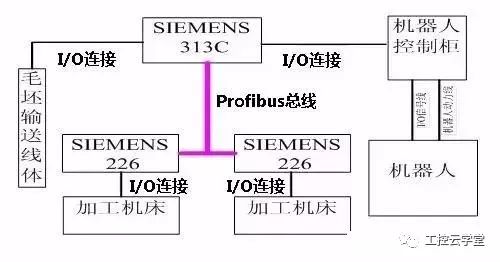
▲图一:PLC与机器人系统构成
上图PLC采用西门子品牌,S7-300作为上位机,S7-200与机床通过I/O信号相连;S7-300与S7-200使用Profibus总线相连;S7-300与工业机器人使用I/O信号相连;工业机器人主体和控制器之间使用自带通讯电缆(直接接插)连接。
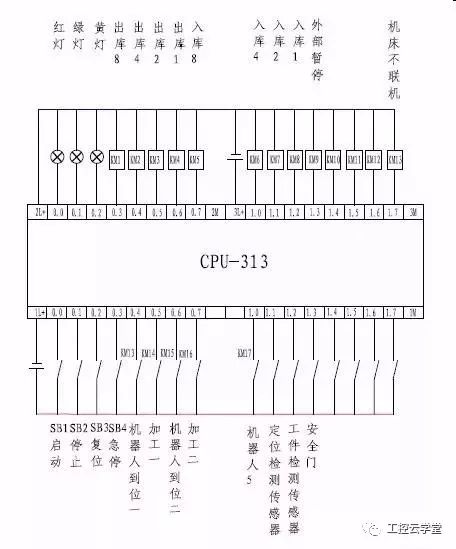
▲图二:S7-300(CPU-313)输入输出信号

▲图三:S7-200输入输出信号(控制车床)
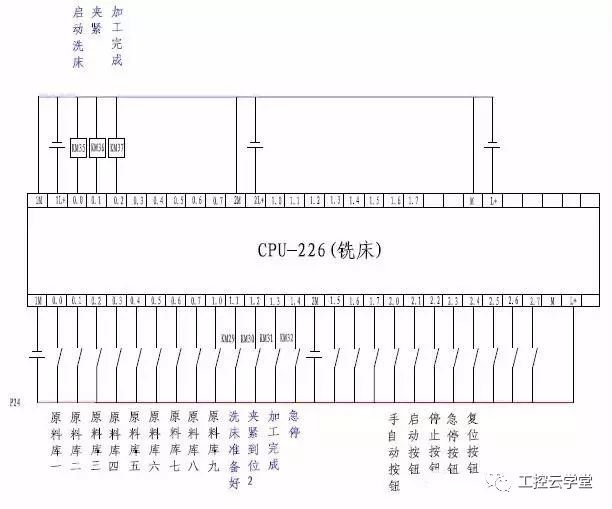
▲图四:S7-200输入输出信号(控制洗床)
-
plc
+关注
关注
5011文章
13286浏览量
463216 -
工业机器人
+关注
关注
91文章
3363浏览量
92638
原文标题:作为机器人工程师,不懂PLC怎么行!
文章出处:【微信号:GKYXT1508,微信公众号:工控云学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论