 物联网系统中的高精度测距方案_单点TOF激光雷达
物联网系统中的高精度测距方案_单点TOF激光雷达
物联网系统中为什么要使用单点TOF激光雷达
物联网系统中使用单点TOF(Time of Flight,飞行时间)激光雷达的原因主要基于其独特的优势和应用场景的需求。以下是详细的解释:
单点TOF激光雷达的优势
高精度测距:
TOF激光雷达通过测量光脉冲往返目标的时间来计算距离,这种方法能够提供高精度的距离数据。在物联网系统中,精确的距离测量是许多应用的基础,如自动导航、环境建模和路径规划等。
抗干扰能力强:
由于使用主动光源,TOF激光雷达在光源不伤害人眼的情况下,抗干扰能力相对较强。这意味着它可以在复杂的环境中稳定工作,减少因外部干扰而导致的误差。
成本相对较低:
相比于其他类型的激光雷达,如相干探测激光雷达,TOF激光雷达的系统构建相对简单,因此成本也相对较低。这对于大规模部署在物联网系统中的设备来说是一个重要的考虑因素。
探测距离灵活:
TOF激光雷达的探测距离可以根据需求进行调节,通过调整光源的强度或接收器的灵敏度,可以实现从短距离到中长距离的不同探测需求。
物联网系统中的应用需求
环境感知:
物联网系统需要实时感知周围环境的变化,包括障碍物的位置、形状和大小等。单点TOF激光雷达能够提供精确的距离信息,帮助系统构建环境的三维模型,从而实现精准的环境感知。
自主导航:
在自动驾驶、机器人等领域,自主导航是物联网系统的重要功能之一。单点TOF激光雷达可以通过测量与周围物体的距离,为系统提供导航所需的精确位置信息,帮助系统实现自主避障和路径规划。
安全监控:
在安全监控领域,物联网系统需要实时监测特定区域的安全状况。单点TOF激光雷达可以部署在关键位置,通过测量与周围物体的距离变化来检测潜在的入侵行为或异常情况。
工业测量:
在工业自动化领域,用于精确测量物体的位置和尺寸。
综上所述,物联网系统中使用单点TOF激光雷达的原因在于其高精度测距、抗干扰能力强、成本相对较低以及探测距离灵活等优势。这些优势使得单点TOF激光雷达成为物联网系统中实现环境感知、自主导航和安全监控等功能的重要工具。同时,随着技术的不断进步和成本的进一步降低,单点TOF激光雷达在物联网系统中的应用前景将更加广阔。
本文会再为大家详解激光雷达家族中的一员——单点TOF激光雷达。
激光雷达介绍
激光雷达最基本的工作原理与无线电雷达没有区别,即由雷达发射系统发送一个信号,打到被测目标物上,引起散射,经目标反射后被接收系统收集,通过测量反射光的运行时间而确定目标的距离。
至于目标的径向速度,可以由反射光的多普勒频移来确定,也可以测量两个或多个距离,并计算其变化率而求得速度,这也是直接探测型雷达的基本工作原理。激光雷达的作用就是精确测量目标的位置(距离与角度)、形状(大小)及状态(速度、姿态),从而达到探测、识别、跟踪目标的目的。激光雷达是一种雷达系统,是一种主动传感器,所形成的数据是点云形式。其工作光谱段在红外到紫外之间,主要发射机、接收机、测量控制和电源组成。
如今,激光雷达已被广泛应用于机器人、无人驾驶、AR/VR、3D打印等多个领域,根据应用领域的不同,激光雷达的类型也存在一定差异,机器人是目前激光雷达应用最为火热的领域之一。
激光雷达测距原理
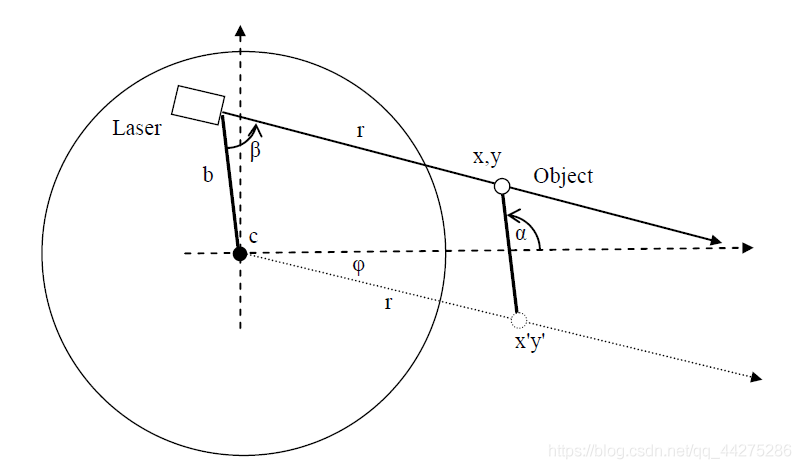
1、三角测距原理
三角测距原理如上图:


这样就可得到物体到激光发射器的距离 d dd 了,激光雷达将这样的发射器和接收器组装在一起,经过机械旋转360°即可得到一周障碍物的距离。
2、TOF测距原理
由三角测距的计算公式不难发现,当距离 d dd 很大时,每变化 δ d delta dδd 引起的 x xx 变化很小,导致精度下降,这就限制了测量范围。
而TOF(Time of flight)原理克服了测量距离这一难点,并且提高了精度:
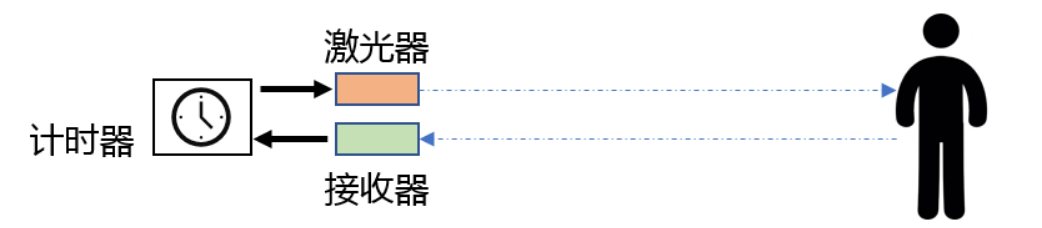
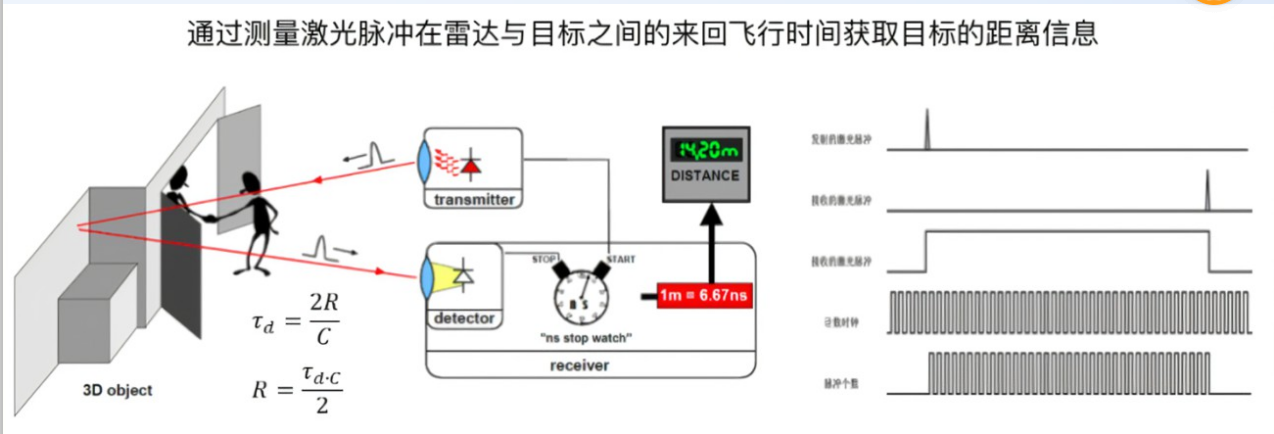
TOF原理十分简单,就是利用光速测距。首先激光发射器发射激光脉冲,计时器记录发射时间;脉冲经物体反射后由接收器接受,计时器记录接受时间;时间差乘上光速即得到距离的两倍。
TOF原理看似简单,但是实现起来确有很多难点:
计时问题:由于光速过快,测量时间会变得很短。据网上数据得:1cm的测量距离对应65ps的时间跨度。这需要计时器的精确度很高。
脉冲问题:发射器需要发射高质量的脉冲光,接收器接受脉冲光的时候需要尽量保持信号不失真。
对于同一距离的物体测距时,得到的回波信号可能不一样,如下图的黑白纸,这就需要特殊的处理方式来处理。但总的来说TOF原理的精度远远超过三角测距,只是由于诸多难点导致成本略高。像大一立项时因为没钱,所以用的三角测距的思岚A1,精度不是很高。而ROBOCON战队里的sick激光雷达就是TOF原理,精度非常高,贵是有道理的。
单点激光雷达是基于TOF即时间飞行法,采用相位法实现测距功能。产品发出经调制的近红外光,遇物体后反射,单点激光雷达通过计算调制红外光的发射、反射后产生的相位差,来换算与被测目标物体之间的距离,以产生深度信息。
单点激光雷达具有IP65高防尘防水等级,抗强光干扰。它体积小,操作简单,能精准探测快速移动车辆,准确性高达99%。单点激光雷达无需具备2D激光雷达的二次开发能力,内置独立算法可同时测出车速、车长、车宽、车高等多项数据,成本较低,后期维修简单,整体性价比非常高。
tof激光雷达原理
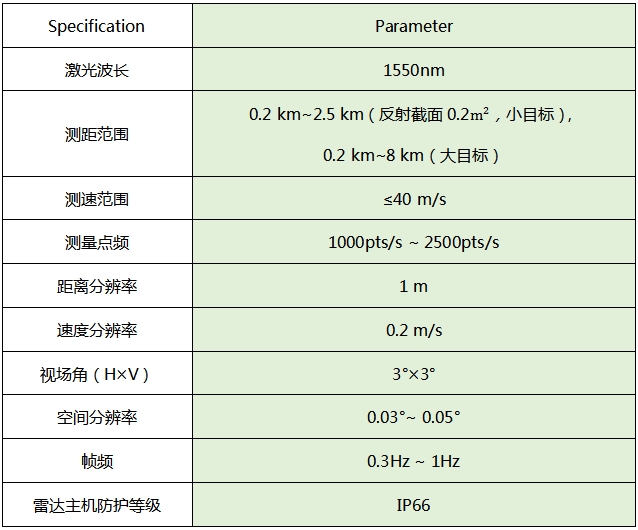
单点TOF激光雷达选型参数
单点TOF激光雷达的选型参数通常包括以下几个方面:
测量范围:这是激光雷达能够测量的最大和最小距离。例如,某些型号可能具有20米至180米不等的测量范围。
测量精度:指激光雷达测量距离的准确度,通常以厘米为单位表示,如±3cm或±5cm。
测量频率:即激光雷达每秒能够进行的测量次数,这决定了其响应速度和数据处理能力。常见的测量频率范围从几百Hz到几千Hz不等。
抗环境光能力:表示激光雷达在强光环境下的工作能力,通常以Klux为单位表示,如100Klux。
激光束发散角和接收视场角:这两个参数影响激光雷达的探测范围和精度。发散角越小,激光束越集中;接收视场角越大,激光雷达能够接收到的反射光范围越广。
激光波长:常见的激光波长有850nm和905nm等,不同波长的激光在穿透力和反射特性上有所不同。
防护等级:表示激光雷达的防尘防水能力,如IP65等级表示设备能够防止灰尘进入并具有一定的防水能力。
供电电压和功耗:这些参数决定了激光雷达的能源需求和续航能力。
通信接口:包括LVTTL、TTL、IIC、RS232、RS485等多种类型,用于与控制系统进行数据交换。
单点TOF激光雷达使用注意事项
环境评估:在使用前评估环境的光照和气象状况,确保激光雷达能够在正常条件下工作。
避免遮挡:尽量选择开阔的测量位置,减少高墙、大树等遮挡物的干扰。
目标识别:确保正确识别目标,并根据目标表面特性选择合适的测量模式。
固定角度:保持激光雷达与目标之间的固定角度,避免角度变化过大导致测距误差增大。
安全使用:激光雷达发出的激光束可能对眼睛和皮肤造成伤害,因此在使用时应佩戴适当的防护装备。
单点TOF激光雷达优缺点
优点:
高精度:能够实现亚毫米级的测量精度。
高速度:能够以很高的速率进行测量,适用于高速移动物体的测距。
大测量范围:测量范围通常较大,适用于不同距离范围内的测量需求。
抗干扰能力强:对光照、颜色和表面反射性质的影响较小。
缺点:
成本较高:相对于其他测距技术,单点TOF激光雷达的成本较高。
受多路径干扰影响:当光脉冲与目标物体的反射光同时经过多个路径到达传感器时,会影响测量精度。
功耗较大:在进行高速测量时需要较大的能量消耗。
视场较小:只能测量单个点的距离,不能提供目标物体的三维形状信息。
单点TOF激光雷达厂商
目前市场上有多家生产单点TOF激光雷达的厂商,如杭州光珀智能科技有限公司、氪见(南京)科技有限公司、苏州镭智传感科技有限公司等。这些厂商在激光雷达领域具有丰富的技术积累和产品研发经验,能够提供高质量的单点TOF激光雷达产品。请注意,以上列举的厂商仅供参考,具体选择时还需根据实际需求进行评估和比较。
供应商A:北醒(北京)光子科技
1、产品能力
对应的产品详情介绍
产品功能
TFmini-I²C 是一款小型激光雷达模组。主要实现实时、无接触式的距离测量功能,具有测量准
确、稳定、高速的特点。
测距原理
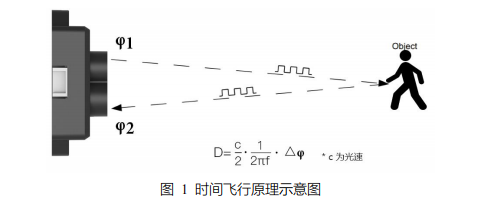
TFmini-I²C 基于 TOF(Time of Flight)即飞行时间原理。具体为产品周期性的向外发出近红外
光调制波,调制波遇物体后反射。产品通过测量调制波往返相位差,得到飞行时间,再计算出产品
与被测目标之间的相对距离,如图 1 所示。
关键特性参数
参数名称 参数值
测距范围 0.3m~12m①
测量准确度 ±6cm@(0.3-6m)② ±1%@(6m-12m)
默认距离单位 cm
距离分辨力 1cm
接收半角 1.15°
发射半角 1.5°
测量频率 100H
2、支撑
(1)技术产品
本文章源自奇迹物联开源的物联网应用知识库Cellular IoT Wiki,更多技术干货欢迎关注收藏Wiki:Cellular IoT Wiki 知识库(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
欢迎同学们走进AmazIOT知识库的世界!
这里是为物联网人构建的技术应用百科,以便帮助你更快更简单的开发物联网产品。
Cellular IoT Wiki初心:
在我们长期投身于蜂窝物联网 ODM/OEM 解决方案的实践过程中,一直被物联网技术碎片化与产业资源碎片化的问题所困扰。从产品定义、芯片选型,到软硬件研发和测试,物联网技术的碎片化以及产业资源的碎片化,始终对团队的产品开发交付质量和效率形成制约。为了减少因物联网碎片化而带来的重复开发工作,我们着手对物联网开发中高频应用的技术知识进行沉淀管理,并基于 Bloom OS 搭建了不同平台的 RTOS 应用生态。后来我们发现,很多物联网产品开发团队都面临着相似的困扰,于是,我们决定向全体物联网行业开发者开放奇迹物联内部沉淀的应用技术知识库 Wiki,期望能为更多物联网产品开发者减轻一些重复造轮子的负担。
Cellular IoT Wiki沉淀的技术内容方向如下:
奇迹物联的业务服务范围:基于自研的NB-IoT、Cat1、Cat4等物联网模组,为客户物联网ODM/OEM解决方案服务。我们的研发技术中心在石家庄,PCBA生产基地分布在深圳、石家庄、北京三个工厂,满足不同区域&不同量产规模&不同产品开发阶段的生产制造任务。跟传统PCBA工厂最大的区别是我们只服务物联网行业客户。
连接我们,和10000+物联网开发者一起降低技术和成本门槛
让蜂窝物联网应用更简单~~
哈哈你终于滑到最重要的模块了,
千万不!要!划!走!忍住冲动!~
欢迎加入飞书“开源技术交流群”,随时找到我们哦~
点击链接如何加入奇迹物联技术话题群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以获取加入技术话题群攻略
Hey 物联网从业者,
你是否有了解过奇迹物联的官方公众号“eSIM物联工场”呢?
这里是奇迹物联的物联网应用技术开源wiki主阵地,欢迎关注公众号,不迷路~
及时获得最新物联网应用技术沉淀发布
(如有侵权,联系删除)
审核编辑 黄宇
-
物联网
+关注
关注
2913文章
44915浏览量
376389 -
激光雷达
+关注
关注
968文章
4024浏览量
190328 -
TOF
+关注
关注
9文章
485浏览量
36444
发布评论请先 登录
相关推荐
全场景适用!TS Spectrum高速数字化仪在激光雷达系统中的应用
激光雷达在安防监控中的优势
激光雷达在农业中的创新应用
如何提升激光雷达数据的精度

物联网系统中的自动驾驶的“眼睛”_纯固态激光雷达


引爆行业热潮,飞芯电子相干4D FMCW无人机侦测激光雷达震撼发布!
又一厂商展出FMCW激光雷达,从PPT走向样品

晶振在激光雷达系统中的作用有哪些
基于FPGA的激光雷达控制板


激光雷达的应用场景
硅基片上激光雷达的测距原理






 工商网监
工商网监
评论