 CW32模块的使用 SR04超声波测距传感器
CW32模块的使用 SR04超声波测距传感器
01模块来源
模块实物展示:

资料下载链接:
https://pan.baidu.com/s/1sSah9PvLBrmbA7So-6YcSw
资料提取码:qq35
工作电压:3-5.5V
工作电流:5.3MA
感应角度:小于15度
探测距离:2CM-600CM
探测精度:0.1CM+1%
输出方式: GPIO
管脚数量:4 Pin
以上信息见厂家资料文件
03移植过程
我们的目标是将例程移植至CW32F030C8T6开发板上【能够判断前方障碍物距离的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
3.1查看资料
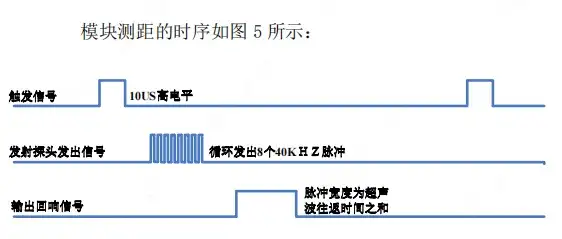
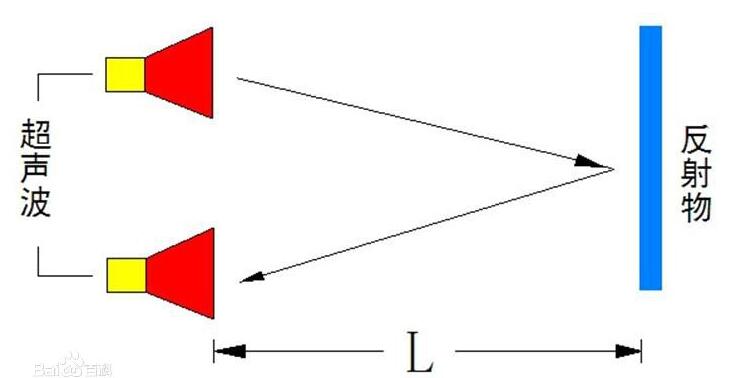
只需要在 Trig 管脚(触发信号)输入一个 10US 以上的高电平,系统便可发出 8 个 40KHZ 的超声波脉冲,然后检测回波信号。当检测到回波信号后,通过 Echo 管脚输出。根据 Echo 管脚输出高电平的持续时间可以计算距离值。即距离值为:(高电平时间*340m/s)/2。
当测量距离超过 HC-SR04 的测量范围时,仍会通过 Echo管脚输出高电平的信号,高电平的宽度约为 66ms。如图所示:
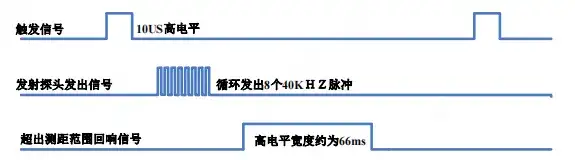
测量周期:当接收到 HC-SR04 通过 Echo 管脚输出的高电平脉冲后,便可进行下一次测量,所以测量周期取决于测量距离,当距离被测物体很近时,Echo 返回的脉冲宽度较窄,测量周期 就很短;当距离被测物体比较远时,Echo 返回的脉冲宽度较宽,测量周期也就相应的变长。最坏情况下,被测物体超出超声波模块的测量范围,此时 返回的脉冲宽度最长,约为 66ms,所以最坏情况下的测量周期稍大于 66ms 即可(取 70ms 足够)。
3.2引脚选择
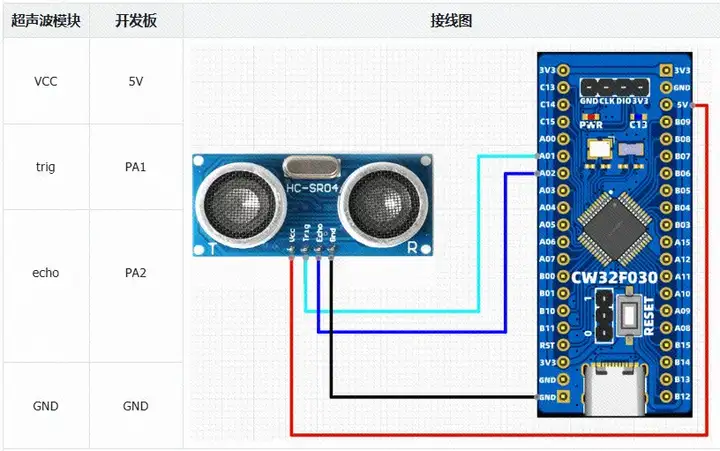
接线表
3.3移植至工程
工程模板参考入门手册的工程模板
移植步骤中的导入.c和.h文件与【CW32模块使用】DHT11温湿度传感器相同,只是将.c和.h文件更改为bsp_ultrasonic.c与bsp_ultrasonic.h。这里不再过多讲述,移植完成后面修改相关代码。
在文件bsp_ultrasonic.c中,编写如下代码。
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #include "bsp_ultrasonic.h" unsigned char msHcCount = 0;//ms计数 float distance = 0; /****************************************************************** * 函 数 名 称:bsp_ultrasonic * 函 数 说 明:超声波初始化 * 函 数 形 参:无 * 函 数 返 回:无 * 作 者:LC * 备 注:TRIG引脚负责发送超声波脉冲串 ******************************************************************/ void Ultrasonic_Init(void) { GPIO_InitTypeDef GPIO_InitStructure; BTIM_TimeBaseInitTypeDef BTIM_TimeBaseInitStruct; // 定时器基本初始化结构体 RCC_SR04_ENABLE(); // 使能GPIO时钟 RCC_TIMER_ENABLE(); // 使能定时器时钟 // GPIO配置参数 GPIO_InitStructure.Pins = GPIO_TRIG; GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出 GPIO_InitStructure.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_SR04, &GPIO_InitStructure); GPIO_InitStructure.Pins = GPIO_ECHO; GPIO_InitStructure.Mode = GPIO_MODE_INPUT_PULLUP; // 上拉输入 GPIO_Init(PORT_SR04, &GPIO_InitStructure); // 禁止中断,以安全地配置NVIC __disable_irq(); // 开启BTIM1中断,并关联到NVIC NVIC_EnableIRQ(TIMER_IRQ); // 允许中断,恢复中断状态 __enable_irq(); // 配置定时器模式、周期和预分频器 BTIM_TimeBaseInitStruct.BTIM_Mode = BTIM_Mode_TIMER; // 设置为定时器模式 BTIM_TimeBaseInitStruct.BTIM_Period = 1000 - 1; // 设置周期,使得定时器每1ms产生一次溢出中断 BTIM_TimeBaseInitStruct.BTIM_Prescaler = BTIM_PRS_DIV64; // 预分频器设置为64,以降低时钟频率 // 使用上述配置初始化定时器BTIM1 BTIM_TimeBaseInit(PORT_TIMER, &BTIM_TimeBaseInitStruct); // 使能BTIM1的溢出中断 BTIM_ITConfig(PORT_TIMER, BTIM_IT_OV, ENABLE); // // 启动定时器BTIM1 // BTIM_Cmd(PORT_TIMER, ENABLE); } /****************************************************************** * 函 数 名 称:Open_Timer * 函 数 说 明:打开定时器 * 函 数 形 参:无 * 函 数 返 回:无 * 作 者:LC * 备 注: ******************************************************************/ void Open_Timer(void) { BTIM_SetCounter(PORT_TIMER, 0); // 清除定时器计数 msHcCount = 0; BTIM_Cmd(PORT_TIMER, ENABLE); // 使能定时器 } /****************************************************************** * 函 数 名 称:Get_TIMER_Count * 函 数 说 明:获取定时器定时时间 * 函 数 形 参:无 * 函 数 返 回:数据 * 作 者:LC * 备 注: ******************************************************************/ uint32_t Get_TIMER_Count(void) { uint32_t time = 0; time = msHcCount*1000; // 得到us time += BTIM_GetCounter(PORT_TIMER); // 得到ms BTIM_SetCounter(PORT_TIMER, 0); // 清除定时器计数 delay_ms(10); return time ; } /****************************************************************** * 函 数 名 称:Close_Timer * 函 数 说 明:关闭定时器 * 函 数 形 参:无 * 函 数 返 回:无 * 作 者:LC * 备 注: ******************************************************************/ void Close_Timer(void) { BTIM_Cmd(PORT_TIMER, DISABLE); // 关闭定时器 } /****************************************************************** * 函 数 名 称:TIMER_IRQHandler * 函 数 说 明:定时器中断服务函数 * 函 数 形 参:无 * 函 数 返 回:无 * 作 者:LC * 备 注:1ms进入一次 ******************************************************************/ void TIMER_IRQHandler(void) { if (BTIM_GetITStatus(CW_BTIM1, BTIM_IT_OV)) // 检查定时器中断发生 { msHcCount++; BTIM_ClearITPendingBit(PORT_TIMER, BTIM_IT_OV); // 清除中断标志 } } /****************************************************************** * 函 数 名 称:Hcsr04GetLength * 函 数 说 明:获取测量距离 * 函 数 形 参:无 * 函 数 返 回:测量距离 * 作 者:LC * 备 注:无 ******************************************************************/ float Hcsr04GetLength(void) { /*测5次数据计算一次平均值*/ float length = 0; float t = 0; float sum = 0; unsigned int i = 0; while(i != 10) { SR04_TRIG(1);//trig拉高信号,发出高电平 delay_1us(20);//持续时间超过10us SR04_TRIG(0);//trig拉低信号,发出低电平 /*Echo发出信号 等待回响信号*/ /*输入方波后,模块会自动发射8个40KHz的声波,与此同时回波引脚(echo)端的电平会由0变为1; (此时应该启动定时器计时);当超声波返回被模块接收到时,回波引 脚端的电平会由1变为0; (此时应该停止定时器计数),定时器记下的这个时间即为 超声波由发射到返回的总时长;*/ while(SR04_ECHO() == GPIO_Pin_RESET);//echo等待回响 Open_Timer(); //打开定时器 i++; while(SR04_ECHO() == GPIO_Pin_SET); Close_Timer(); // 关闭定时器 t = Get_TIMER_Count(); // 获取时间,分辨率为1us length = (float)t / 58.0f; // cm sum += length; } length = sum/10;//五次平均值 distance = length; return length; }
在文件bsp_ultrasonic.h中,编写如下代码。
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #ifndef _BSP_ULTRASONIC_H_ #define _BSP_ULTRASONIC_H_ #include "board.h" #define RCC_SR04_ENABLE() __RCC_GPIOA_CLK_ENABLE() #define PORT_SR04 CW_GPIOA #define GPIO_TRIG GPIO_PIN_1 #define GPIO_ECHO GPIO_PIN_2 #define RCC_TIMER_ENABLE() __RCC_BTIM_CLK_ENABLE() #define PORT_TIMER CW_BTIM1 #define TIMER_IRQ BTIM1_IRQn #define TIMER_IRQHandler BTIM1_IRQHandler #define SR04_TRIG(x) GPIO_WritePin( PORT_SR04, GPIO_TRIG, x?GPIO_Pin_SET:GPIO_Pin_RESET) #define SR04_ECHO() GPIO_ReadPin( PORT_SR04, GPIO_ECHO ) void Ultrasonic_Init(void);//超声波初始化 float Hcsr04GetLength(void );//获取超声波测距的距离 #endif
04移植验证
在自己工程中的main主函数中,编写如下。
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #include "board.h" #include "stdio.h" #include "bsp_uart.h" #include "bsp_ultrasonic.h" int32_t main(void) { board_init(); // 开发板初始化 uart1_init(115200); // 串口1波特率115200 Ultrasonic_Init(); printf("Start.......rn"); while(1) { printf((const char *)"距离为 = %.2fCMrn",Hcsr04GetLength() ); delay_ms(500); } }
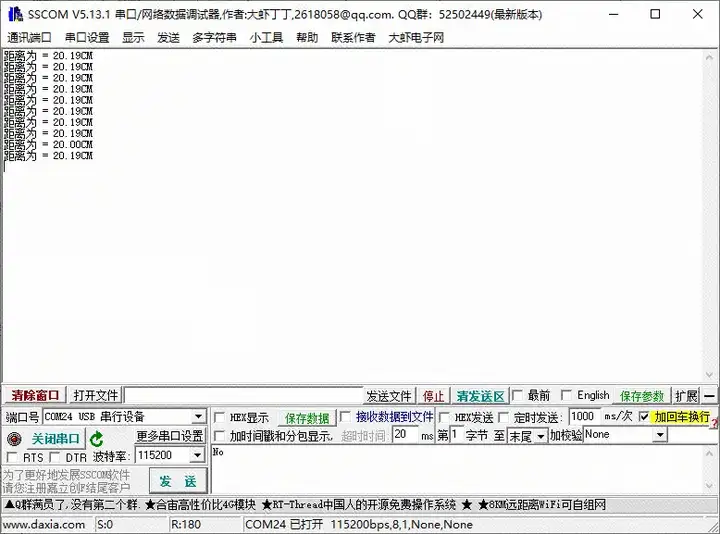
移植现象:距离20CM处摆放障碍物,输出换算后的实际距离。
模块移植成功案例代码:
链接:https://pan.baidu.com/s/1AwXOFbLryUoYPW-ueRZ_qA?pwd=LCKF
提取码:LCKF
审核编辑 黄宇
-
超声波
+关注
关注
63文章
3048浏览量
138790 -
开发板
+关注
关注
25文章
5158浏览量
98502 -
测距传感器
+关注
关注
0文章
76浏览量
20260 -
SR04
+关注
关注
0文章
6浏览量
7008 -
CW32
+关注
关注
1文章
218浏览量
765
发布评论请先 登录
相关推荐
超声波传感器HC-SR04测距实例软件
简单的超声波测距模块制作_HC-SR04超声波测距模块及制作图详解
HC-SR04超声波传感器模块的示例代码资料合集
使用超声波传感器HC SR04和Arduino Uno制作超声波距离传感器

基于CW32模块的SR04超声波测距传感器设计






 工商网监
工商网监
评论