 低功耗智能云台驱动板方案在电力巡检机器人的技术应用介绍
低功耗智能云台驱动板方案在电力巡检机器人的技术应用介绍
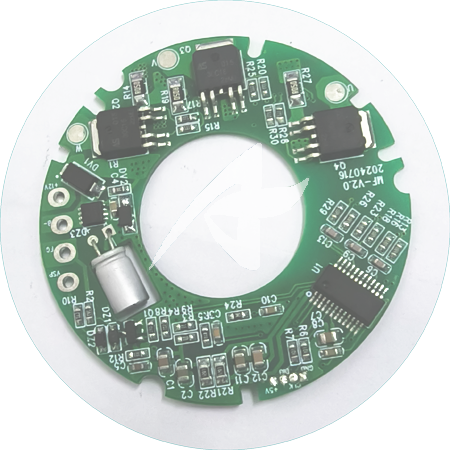
电力巡检机器人作为电力系统自动化和智能化的重要组成部分,其在提高巡检效率、降低人力成本以及保障电力系统安全稳定运行方面发挥着重要作用。低功耗智能云台驱动板作为电力巡检机器人的核心组件之一,对于提升机器人的续航能力和稳定性具有关键意义。本文将详细介绍低功耗智能云台驱动板的技术方案及其在电力巡检机器人中的应用。
1. 技术背景
电力巡检机器人通常需要在户外长时间工作,面临恶劣天气和复杂地形的挑战。因此,机器人的能源效率和稳定性至关重要。低功耗智能云台驱动板能够降低机器人的能耗,延长其在野外的工作时间,同时保证巡检任务的高效完成。
2. 技术特点
低功耗设计:通过优化电路设计和控制算法,减少能量损耗,提高能源利用效率。
智能控制:集成先进的控制算法,如PID控制,实现对云台的精确控制。
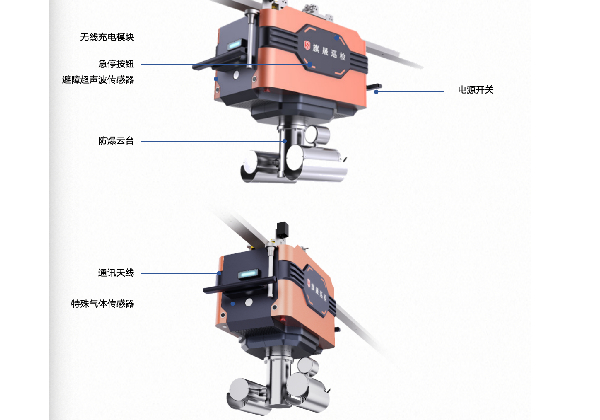
环境适应性:设计能够适应户外环境的防护措施,如防水、防尘、耐高低温。
稳定性:确保在长时间工作中的稳定性和可靠性,减少故障率。
远程控制:支持远程控制,便于操作人员监控和操作。
3. 设计要点
电源管理:采用高效的电源管理方案,如使用低功耗微控制器和高效的电源转换模块。
电机选择:选择高效率、低能耗的电机,以减少能量损耗。
控制算法:开发智能控制算法,如自适应PID控制,提高云台控制的精确度和响应速度。
通信协议:设计低功耗的通信协议,如使用ZigBee或LoRa,以减少通信过程中的能量损耗。
环境适应性:设计防水、防尘、耐高低温的外壳,以适应户外环境。
4. 技术实现
硬件设计:
选择合适的低功耗电机和驱动器。
设计高效的电源管理电路。
集成低功耗通信模块。
软件编程:
编写智能控制算法,实现对云台的精确控制。
实现低功耗通信协议。
设计用户友好的远程控制界面。
系统集成:
将驱动板与机器人的其他系统(如传感器、摄像头)集成。
进行系统测试,确保各部分的兼容性和稳定性。
现场调试:
在实际的电力巡检环境中进行调试。
根据实际应用的反馈进行优化。
5. 实际应用案例
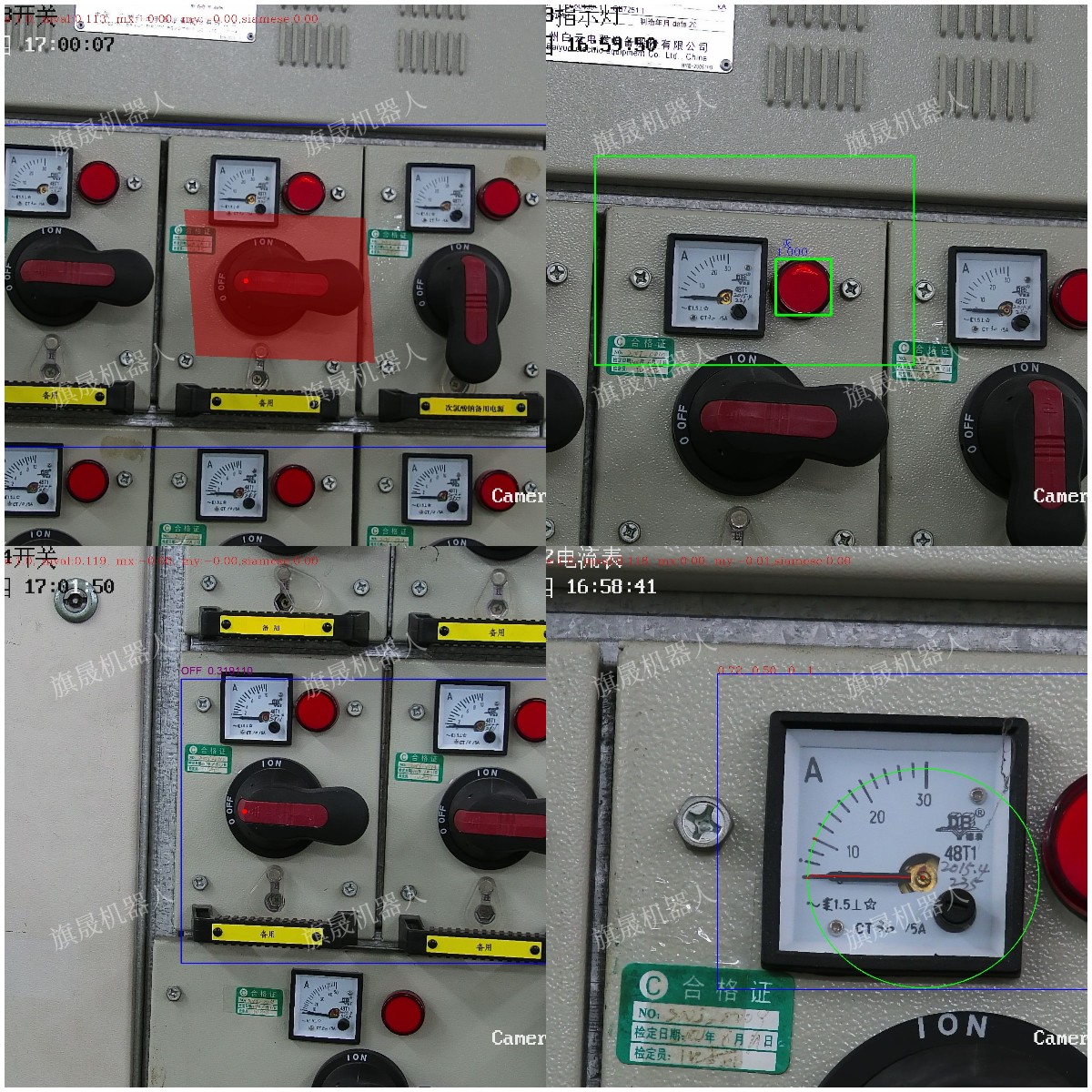
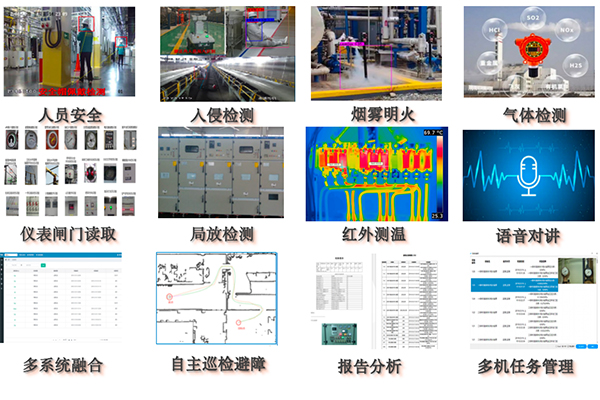
电力线路巡检:机器人搭载低功耗智能云台驱动板,搭载高清摄像头,实现对电力线路的自动巡检,及时发现线路故障和异常。
变电站监控:在变电站内,机器人可以搭载传感器,实现对设备状态的实时监控,如温度、湿度、气体浓度等。
故障诊断:机器人可以搭载红外热像仪,通过云台驱动板控制,实现对电力设备的故障诊断,如过热、短路等。
6. 设计参数
低功耗与性能的平衡:通过优化电路设计和控制算法,实现低功耗与高性能的平衡。
环境适应性:采用高性能材料和密封设计,提高机器人在恶劣环境下的适应性。
远程控制的可靠性:通过使用稳定的通信协议和信号增强技术,提高远程控制的可靠性。
| 云台参数表 | |||
| 电机类型: | 步进电机,无刷直流电机,无感电机,伺服电机 | 电机轴承: | 进口 |
| 额定电压:(V): | 12V | 中心孔直径(mm): | >4.3 |
| 额定电流(A): | 0.7A±20% | 堵转电流(A): | 2.2±20% |
| 额定转速(rpm): | <1700 | 堵转扭矩(Nm): | 0.065士20% |
| 额定扭矩(Nm): | 0.02士20% | 转子惯量(gcm~2): | 30士20% |
| 最大空载转速(rpm): | <3500 | 磁铁极对数(对): | 7(6-8) |
| 三相线电阻(2): | 5士20% | 磁片/磁环: | 磁片 |
| 相间电感(mH): | 1.7士20% | 电机尺寸(mm): | Ф26.3*13 |
| 扭矩常数(Nm/A): | 0.06 | 电机重量(g): | <24g |
低功耗智能云台驱动板在电力巡检机器人中的应用,不仅提高了机器人的工作效率,还降低了能耗。随着技术的不断进步,未来的电力巡检机器人将更加智能化、自动化,为电力行业的安全和稳定运行提供更加强大的支持。
审核编辑 黄宇
-
机器人
+关注
关注
210文章
28180浏览量
206315 -
电力巡检
+关注
关注
0文章
36浏览量
10617
发布评论请先 登录
相关推荐



巡检机器人有哪些功能和应用场景


电力巡检机器人厂家-旗晟机器人
综合管廊挂轨巡检机器人:安全高效管理的新力量
巡检机器人的分类和种类有哪些

巡检机器人有哪些功能和作用?





 工商网监
工商网监
评论