 智驾进程发力?小鹏、蔚来端到端模型上车
智驾进程发力?小鹏、蔚来端到端模型上车
编者语:「智驾最前沿」微信公众号后台回复:C-0546,获取本文参考文档:小鹏、蔚来端到端模型上车,智驾拐点加速到来pdf下载方式。
近年来,全球汽车行业正处于从传统燃油车向电动化、智能化转型的关键时期,而智能驾驶技术的发展被视为这场变革的核心动力。作为自动驾驶的支撑技术之一,端到端大模型凭借其感知、规划和控制的一体化能力,大幅提升了智能驾驶的效率和稳定性。不同于传统的模块化自动驾驶系统,端到端大模型通过深度学习算法实现了驾驶决策过程的高度集成,能够在复杂的城市环境中自适应调整驾驶策略。
端到端大模型的技术原理与传统系统的对比
1.1端到端大模型的技术原理
端到端大模型的基础是深度学习和人工智能,它通过统一的神经网络架构来实现从环境感知到车辆控制的自动化操作。该模型通过摄像头、激光雷达、雷达等传感器收集的原始数据,使用卷积神经网络(CNN)进行图像识别与处理,再通过循环神经网络(RNN)对时间序列进行处理,最终生成控制指令,从而完成感知、决策、控制的闭环操作。
传统的自动驾驶系统将感知、规划、决策和控制拆分为多个独立模块,每个模块需要单独进行训练和优化,这导致了系统的复杂性增加,且各模块间的协作存在瓶颈。而端到端大模型则通过统一的网络结构,实现了各模块之间的紧密结合,减少了复杂性并提升了系统的整体响应速度。例如,在城市拥堵路段,端到端大模型能够快速识别车辆、行人等信息,并基于实时数据选择最优路径和速度,从而确保驾驶的平稳与安全。
1.2端到端大模型的优势
端到端大模型的最大优势在于它能够通过大量真实的驾驶数据不断学习,进而提升对复杂环境的适应能力。它无需为每种场景单独编写规则,而是通过数据驱动不断优化算法。这使得端到端大模型在应对未知或变化的路况时具有更高的灵活性和鲁棒性。例如,在无车道标记的城市道路上,端到端大模型可以通过对道路边界的自动学习与识别,实现对车辆的精确控制。
此外,端到端大模型还通过减少感知、规划、决策等多模块之间的接口问题,降低了系统的调试与维护成本。对于车企而言,这意味着更短的研发周期和更低的运营成本。以小鹏XNGP系统为例,通过端到端大模型的引入,小鹏成功实现了从城市到高速的全域智能驾驶,使得智能驾驶功能在更多复杂路况中具备了较高的稳定性和可靠性。
小鹏的技术发展路径:从NGP到XNGP
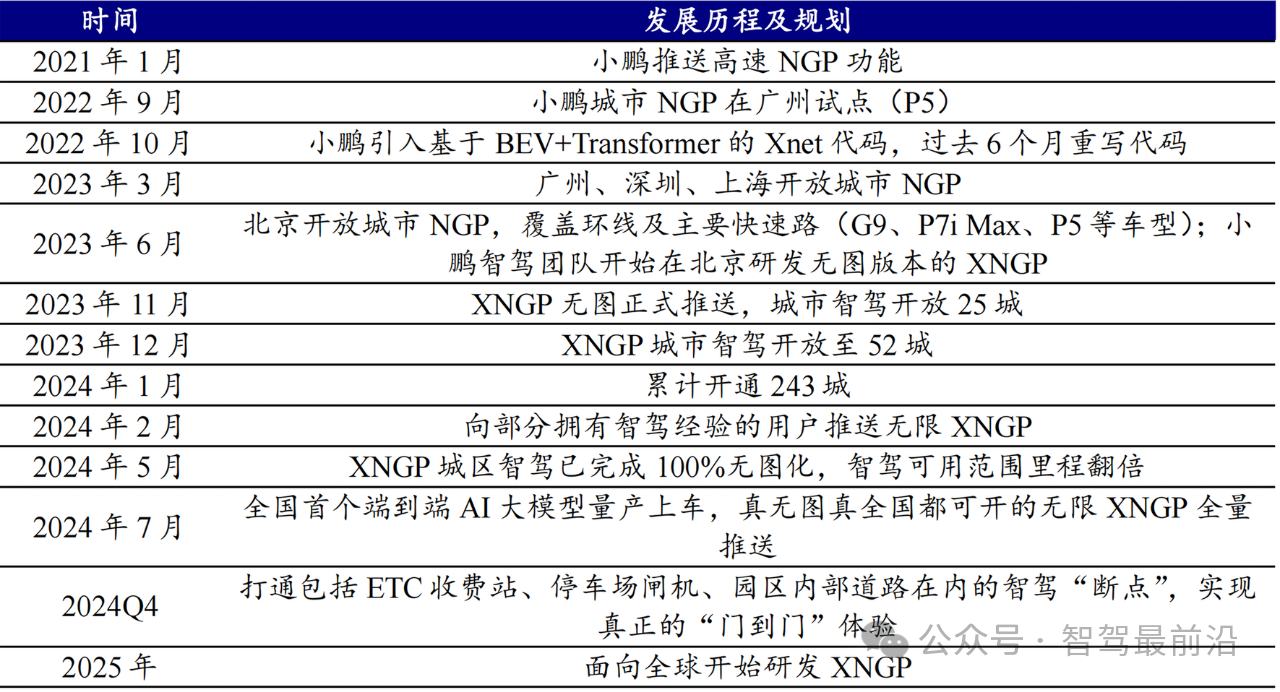
小鹏XNGP发展规划
2.1高速NGP:小鹏的起步
小鹏汽车的智能驾驶技术首先体现在其高速NGP(Navigation Guided Pilot)系统中,该系统支持车辆在高速公路环境下的自动驾驶,包括自动变道、超车、车道保持等功能。通过高精地图与传感器融合,NGP系统为用户提供了高度自动化的驾驶体验,并极大地降低了驾驶疲劳。
然而,高速NGP的应用场景较为有限,仅能在高速公路这种相对规则的环境中使用。为进一步提升用户的智能驾驶体验,小鹏通过引入端到端大模型,开始向更复杂的城市场景扩展。
2.2 XNGP:城市智驾的全面覆盖
小鹏的XNGP(eXpand Navigation Guided Pilot)是基于端到端大模型的智能驾驶系统,该系统不仅实现了高速公路自动驾驶,还覆盖了复杂的城市道路环境。在端到端大模型的支持下,XNGP能够在没有高精地图支持的情况下,通过车辆传感器和实时数据处理,完成对城市复杂路况的自动识别与决策。
根据小鹏的实车测试数据,XNGP系统已覆盖全国2595个城市,累计测试行驶里程达到756万公里。这些数据不仅证明了小鹏在智能驾驶领域的技术实力,也展示了端到端大模型的强大适应能力。XNGP的另一个显著特点是“全国都好用”,这一目标意味着车辆在任何道路环境下都能通过实时学习与调整,实现安全稳定的自动驾驶。无论是狭窄的城市小道、环岛,还是没有清晰标线的道路,XNGP都能凭借端到端大模型的“脑补”能力,确保行驶的准确性和安全性。

小鹏汽车AI智驾技术发布会
2.3“门到门”体验的实现
XNGP的另一项重要突破在于实现了真正的“门到门”智能驾驶体验,即车辆能够从起点到终点的全程自动驾驶,包括园区、停车场、城市道路等多种场景的无缝衔接。该功能依托于端到端大模型的实时感知和动态决策能力,能够在ETC收费站、园区内部道路等复杂环境中进行精准的路径规划和驾驶控制。
这种“门到门”体验不仅提升了用户的出行便捷性,也展示了端到端大模型在多场景下的广泛适用性。通过这一技术,小鹏成功将智能驾驶功能从单一场景应用扩展到了多场景全覆盖,为行业提供了一个全新的发展方向。

蔚来的NIO World Model与智能驾驶的创新
3.1 NIO World Model的定义与技术架构
蔚来在智能驾驶领域的探索与小鹏不同,其核心技术聚焦于NIO World Model(NWM),即世界模型。NWM通过生成式神经网络,能够对车辆周围的环境进行全面建模与预测。该系统不仅能够感知当前的道路信息,还能够对未来的场景进行预测,从而提高了自动驾驶系统的决策能力与安全性。
NWM的关键优势在于其对动态场景的预测能力。通过对环境信息的深度理解与推演,NWM能够预测未来几秒内其他车辆、行人的行为,并提前调整行驶策略。例如,当车辆接近交叉路口时,NWM可以预测对面车辆的可能转向行为,从而提前选择最佳的行驶路径。

3.2 NOP+ 2.0的功能提升
蔚来的智能驾驶技术进一步体现在其NOP+ 2.0系统中。该系统基于NWM的能力,显著提升了车辆在复杂场景下的自动驾驶性能。NOP+ 2.0不仅能够在高速公路上实现自动驾驶,还支持城市道路的点到点全域领航辅助。通过对动态环境的精确理解,NOP+ 2.0系统可以自主选择最优路径,并在路况复杂的环境中自主调整车辆行驶速度和路线。
此外,NOP+ 2.0还增强了系统的智能安全辅助功能,通过对其他车辆的行为预测和预判,极大提高了行驶的安全性。NWM的这种深度学习和场景推演能力,赋予了蔚来智能驾驶系统强大的适应性和可靠性,进一步提升了用户体验。
端到端大模型对行业发展的影响
4.1快速迭代与系统升级
端到端大模型的引入大大加快了智能驾驶系统的迭代速度。传统的自动驾驶系统在进行软件更新和功能扩展时,往往需要数月甚至数年的开发和调试周期,而端到端大模型通过数据驱动和自监督学习,能够实现快速的模型优化与升级。
以小鹏为例,其XNGP系统通过OTA(Over-the-Air)系统的快速更新,每两周就能够进行一次功能体验升级。相较于传统的自动驾驶系统,这一模式的高效性极大地提升了用户体验,并使得车企能够在市场竞争中保持技术领先。
4.2全球化布局与市场扩展
随着端到端大模型技术的成熟,智能驾驶系统的应用不再局限于单一市场。小鹏和蔚来都已开始布局全球市场,计划将其先进的智能驾驶技术推广至更多国家和地区。例如,小鹏计划到2025年在全球30个国家实现XNGP的商业化落地,并根据不同市场的需求和法规进行技术调整。
这一全球化扩展战略不仅有助于提升品牌的国际影响力,也推动了端到端大模型在全球范围内的广泛应用。通过在不同国家积累的数据,端到端大模型将不断提升其泛化能力,进一步推动智能驾驶的全球化进程。
行业挑战与未来机遇
5.1数据安全与隐私问题
随着智能驾驶系统的广泛应用,数据安全与隐私问题成为行业关注的焦点。端到端大模型需要依赖海量的驾驶数据进行训练与优化,这些数据涉及用户的位置信息、驾驶习惯等敏感信息。如何在保障智能驾驶技术快速发展的同时,确保用户数据的隐私与安全,是车企和监管机构面临的重大挑战。
5.2法规与政策的适应性
全球各国对自动驾驶技术的法律法规仍处于不断完善的阶段,如何在不同市场满足监管要求,成为车企推广智能驾驶技术的关键因素。例如,欧洲国家对数据隐私保护和安全性要求较高,这可能影响端到端大模型在该地区的推广进度。未来,车企需要在技术开发过程中与各国政府保持密切合作,确保智能驾驶技术的合规性与安全性。
结论
端到端大模型的出现为智能驾驶技术的发展带来了革命性的变化。通过对小鹏和蔚来在这一领域的成功实践进行分析,可以看到端到端大模型不仅提升了自动驾驶系统的性能,还加速了智能驾驶的商业化进程。未来,随着数据积累和技术的不断完善,端到端大模型将进一步推动全球智能驾驶的普及,为出行方式带来新的变革。
审核编辑 黄宇
-
自动驾驶
+关注
关注
784文章
13778浏览量
166344 -
深度学习
+关注
关注
73文章
5497浏览量
121094
发布评论请先 登录
相关推荐
“端到端”智驾芯片,英伟达DRIVE Thor接棒,车企自研芯片对标行业领先
特斯拉带火“端到端”智驾,国内车企加速上车


黑芝麻智能端到端算法参考模型公布

爆火的端到端如何加速智驾落地?

连接视觉语言大模型与端到端自动驾驶

智己汽车“端到端”智驾方案推出,老司机真的会被取代吗?

消息称小鹏汽车自研智驾芯片流片成功
国产车企自研智驾芯片加速落地,蔚来小鹏等领跑赛道
端到端必然是高阶自驾的未来


端到端模型卷入智驾圈 周光:今年上车!






 工商网监
工商网监
评论