 三轴陀螺仪在物联网系统中检测重力加速度的方案分享
三轴陀螺仪在物联网系统中检测重力加速度的方案分享
物联网系统中使用姿态传感器是因为它们能够提供高精度、实时性和可靠性的姿态测量数据,广泛应用于航空航天、机器人技术、智能家居、安防监控等多个领域,为物联网系统的发展提供了重要支持。姿态传感器通常应用于以下场景:
航空航天:在航空航天领域,姿态传感器用于实现精确的导航和飞行控制,确保飞行器的稳定性和安全性。
机器人技术:在机器人领域,姿态传感器用于实时监测和控制机器人的姿态,实现精确的运动控制和姿态调整。
智能家居:在智能家居领域,姿态传感器可以应用于智能门锁、智能窗帘等设备中,通过感知用户的姿态来实现自动控制和智能化操作。
安防监控:在安防监控领域,姿态传感器可以用于人体姿态识别,通过实时监测人体的动作和姿态来预防潜在的安全风险。
例如:智能物联网设备
电池供电设备通过加速度计进行姿态与运动检测,充分利用加速度传感器内部集成的硬件算法,能更好的平衡性能与耗电这个电池供电设备的重要需求。

电池供电的物联网产品,部分采用不可充电的纽扣电池,而部分需要更强运算功能的需要采用可充电锂电池,在有限的电池资源下如何延长电池寿命,对于传感器部分,常用的方式通常有两种:
采用超低功耗的微处理器,通过利用传感器本身自带的FIFO功能,减少微处理器周期唤醒的次数和唤醒时间。
利用传感器本身的搭载的低功耗边缘计算功能,最大限度的降低微处理器的功耗。
加速度计的运动状态检测常见的用途有:
检测由静到动,比如车辆防盗系统中可以用加速度计判定异常的震动;电表水表汽表检测非法打开测量设备;手机里面依据震动加上角度判断识别手机是否被用户拿起了;车载视频监控检测到车辆启动自动录像操作,遥控器被拿起后进入快速连接状态等等;
检测由动到静,主要是用于依靠这个状态信息进行相应的控制,比如玩具如果在设定时间内是静止的,自动关机节省电源等等;
检测动的方式,比如TWS耳机或者电子烟上使用敲击的方式来实现无按键控制,比如计步检测,撞击检测,双击实现类似电源开关或者打开费电的射频单元等等。
姿态传感器优势
小型设备应用:现代姿态传感器倾向于微型化和集成化,可以在小型设备中实现高性能的姿态测量功能。这种微型特性使得姿态传感器广泛应用于移动终端、智能可穿戴设备等场景。
低功耗设计:姿态传感器通常采用低功耗设计,延长了设备的续航时间,适用于需要长时间运行的物联网系统。
实时性:姿态传感器能够实时输出物体的姿态数据,为物联网系统提供及时的反馈和控制信息。
可靠性:通过定期的错误校正和校准,姿态传感器能够保持其准确性和可靠性,确保物联网系统的稳定运行。
本文会再为大家详解传感器家族中的一员——姿态传感器。
姿态传感器的定义
姿态传感器是一种集成了多种传感器技术的设备,主要用于实时测量和确定物体或系统的空间姿态信息。这些传感器通常包括加速度计、陀螺仪和磁力计等,它们各自提供关于物体运动状态的不同方面的数据。通过综合处理这些数据,姿态传感器能够计算出物体相对于某一参考系(如地球或某个固定点)的方向、倾斜角度、旋转速率等姿态参数
姿态传感器的结构
姿态传感器是基于MEMS(微机电系统)技术的高性能三维运动姿态测量系统,其内部结构通常包含以下几个关键组件:
传感器单元
三轴陀螺仪:用于测量物体绕三个轴的角速度,帮助跟踪物体的旋转方向和速度。
三轴加速度计:测量物体在三个轴向上的加速度,包括重力加速度,从而确定物体的倾斜角度。
三轴电子罗盘(或磁力计):测量地球磁场的方向,提供关于物体绝对方向的信息。
处理器单元
低功耗ARM处理器:负责接收来自传感器单元的数据,进行温度补偿、数据融合和算法处理等,最终输出校准过的姿态数据。数据处理与算法
基于四元数的三维算法:用于实时计算物体的姿态,包括方向、旋转角度等,确保输出的姿态数据具有高精度和稳定性。
特殊数据融合技术:如卡尔曼滤波算法等,用于将来自不同传感器的数据进行融合处理,以消除噪声和误差,提高测量精度。
数据输出接口:提供I2C、SPI、串口等多种接口,方便用户根据自己的需求进行选择和配置。
通信协议:支持标准的通信协议,确保与主控芯片或其他设备的稳定通信。
其他辅助模块
电源模块:为姿态传感器提供稳定的电源供应。
温度补偿模块:用于对传感器数据进行温度补偿,消除温度变化对测量精度的影响。
姿态传感器的工作原理
传感器数据采集
加速度计:
加速度计是一种能够测量物体加速度的传感器。它通常使用微机电系统(MEMS)技术,通过检测物体在空间中的加速度变化来测量姿态角度的方向。加速度计可以测量物体在三个轴(X轴、Y轴、Z轴)上的加速度,包括重力加速度。根据物体的加速度信息,可以计算出姿态参数,如倾斜角度和旋转角度。
以下图为例,中间是一个具有一定质量,左右有弹簧的小滑块,小滑块移动时,滑块上的电位器也跟着移动,通过电位器的电压,就能够知道滑块的加速度值。这个加速度计实际上是一个弹簧测力计,根据牛顿第二定律F=ma,想要测量加速度a,只需要找一个单位质量的物体,测量它所受的力F就行了。

X、Y、Z轴都具有一个加速度计,以下面的图为例,假设芯片里有6个测力的秤组成一个正方体,正方体内部放一个大小正好的单位质量小球,小球压在一个面上,就会产生对应轴的数据输出。如果压在上面为正值,压在下面为负值,6个面测的力就是3个轴的加速度值。
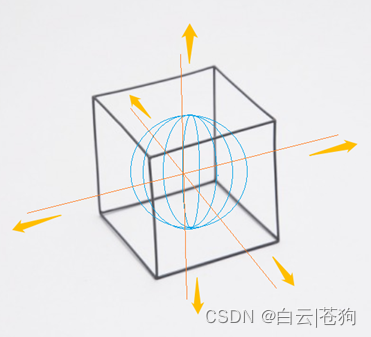
加速度计具有静态稳定性,不具有动态稳定性。假设芯片向左倾斜放置,底面和左面都受力,求一个三角函数,就能得到向左的倾角。但是这个倾角只有在静态时生效。因为加速度分重力加速度和运动加速度,如果此时芯片运动起来,这个三角函数的倾角就会受运动加速度的影响。(向前加速运动时,芯片的底面和左面也受力,无法判断芯片的状态是向左倾斜放置还是向前加速。)
陀螺仪:
陀螺仪是一种能够测量物体旋转速度的传感器。它利用旋转惯性原理,通过检测物体绕不同轴的旋转速度来测量姿态角度的速度和目标。陀螺仪的数据对于确定物体的旋转方向和速度至关重要。
陀螺仪:一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。
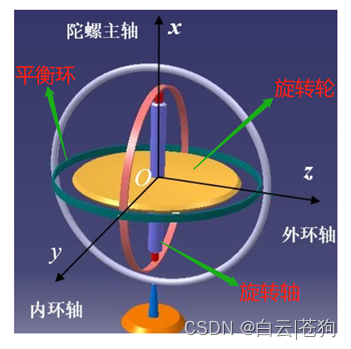
如图所示,中间是一个有一定质量的旋转轮,外面是3个轴的平衡环,当中间的旋转轮高速旋转时,根据角动量守恒原理,这个旋转轮具有保持它原有角动量的趋势。这个趋势可以保持旋转轴方向不变,当外部物体转动时,内部的旋转轴方向不会转动。这会在平衡环连接处产生角度偏差,如果在连接处放一个电位器,测量电位器的电压,就能得到角度了。
但是陀螺仪并不能直接测量角度。芯片内部的陀螺仪测量的时角速度,分别表示了此时芯片绕X、Y、Z轴旋转的角速度。
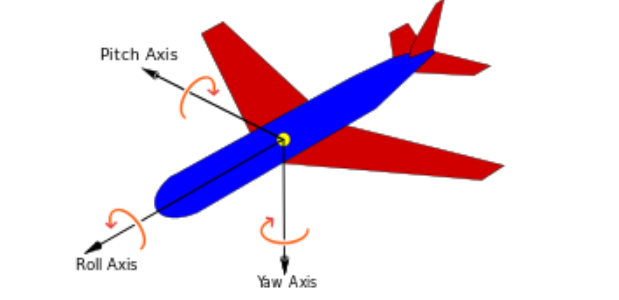
俯仰角θ(pitch):机体坐标系X轴与水平面的夹角。当X轴的正半轴位于过坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负。
偏航角ψ(yaw):机体坐标系xb轴在水平面上投影与地面坐标系xg轴(在水平面上,指向目标为正)之间的夹角,由xg轴逆时针转至机体xb的投影线时,偏航角为正,即机头右偏航为正,反之为负。
滚转角Φ(roll):机体坐标系zb轴与通过机体xb轴的铅垂面间的夹角,机体向右滚为正,反之为负。
对角速度进行积分,就可以得到角度。通过角速度积分得到的角度也有局限性,当物体静止时,角速度会因为噪声无法完全归零,经过积分的累积,噪声会导致计算出来的角速度产生缓慢的偏移。但是这个角度不会受物体运动的影响。
加速度计具有静态稳定性,陀螺仪具有动态稳定性,这两种传感器的特性正好互补。所以取长补短,进行互补滤波,就能获得稳定的姿态角了。
磁力计:
磁力计是一种可以测量地面磁场的传感器。它利用物体周围的地面磁场信息,通过检测磁场方向和强度的变化来测量姿势方向和视角。磁力计的数据用于提供关于物体绝对方向的信息,与加速度计和陀螺仪的数据相结合,可以进一步提高姿态测量的准确性。
磁力计是一种可以测量地面磁场的传感器。它利用物体周围的地面磁场信息,通过检测磁场方向和强度的变化来测量姿势方向和视角。磁力计通常与加速度计和陀螺仪等传感器结合使用,以提供更准确的姿势测量结果。
为了去除噪音和偏差,并获得准确的姿态状态,姿态传感器通常会将上述多个传感器导出的数据进行整合和过滤。
数据融合与算法处理
数据融合:姿态传感器将加速度计、陀螺仪和磁力计等传感器的数据进行融合处理。这通常通过复杂的算法来实现,如卡尔曼滤波算法等。数据融合的目的是消除传感器之间的噪声和误差,提高测量精度和稳定性。
算法处理:基于四元数的三维算法是姿态传感器中常用的算法之一。该算法利用四元数表示物体的旋转和姿态,通过实时计算四元数的变化来跟踪物体的姿态。此外,还有其他算法如欧拉角表示法、旋转矩阵等也常用于姿态传感器的数据处理中。
姿态输出
经过数据融合和算法处理后,姿态传感器可以输出物体的姿态信息。这些信息通常以四元数、欧拉角或旋转矩阵等形式表示,并可以通过I2C、SPI、串口等接口传输给主控芯片或其他设备。
硬件结构
如下图所示为系统硬件总框图
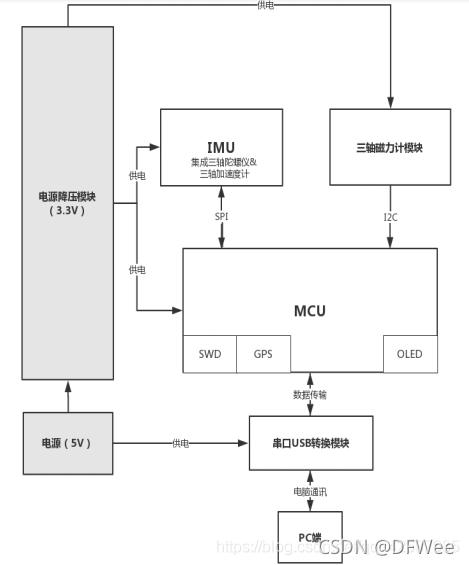
主要分为电源模块、单片机模块、磁传感模块、加速度传感模块和RS-232接口模块。
软件流程
如下图所示为系统软件总框架图
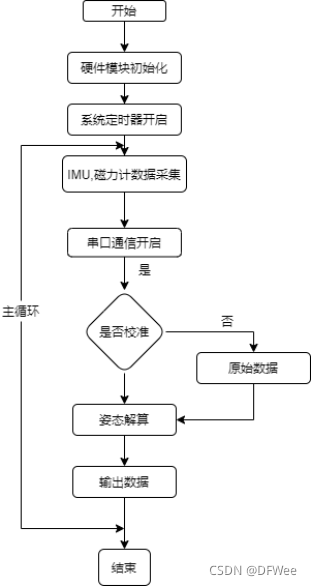
利用基于四元数的三维算法和特殊数据融合技术,实时输出以四元数、欧拉角表示的零漂移三维姿态方位数据。主要可以分为初始化、采集、通信、解析、输出等几个环节,产品配套有成熟的上位机软件可以很简便地直接使用,并且可以根据需求进行功能或界面的修改。
姿态传感器的分类
按集成传感器类型分类
三轴加速度传感器:主要测量物体在X轴、Y轴和Z轴三个方向上的加速度,通过加速度数据可以计算出物体的倾斜角度等姿态信息。
三轴陀螺仪:测量物体绕三个轴的角速度,帮助跟踪物体的旋转方向和速度。
三轴磁力计(电子罗盘):测量地球磁场的方向,提供关于物体绝对方向的信息。
六轴姿态传感器:集成了三轴加速度计和三轴陀螺仪,能够同时测量物体的加速度和角速度,从而更准确地计算物体的姿态。
九轴姿态传感器:在六轴姿态传感器的基础上增加了三轴磁力计,能够同时测量加速度、角速度和磁场信息,进一步提高了姿态测量的精度和稳定性。
按功能特性分类
高精度姿态传感器:采用高精度传感器和先进的数据处理算法,能够提供高精度的姿态信息,适用于对测量精度要求较高的应用场景。
低功耗姿态传感器:通过低功耗设计和优化算法,能够在保证测量精度的同时降低功耗,延长设备的使用时间。
小型化姿态传感器:采用先进的封装技术和微型化设计,使得传感器体积更小、重量更轻,便于在小型设备或嵌入式系统中使用。
按应用场景分类
航空航天姿态传感器:用于飞机、火箭等航空航天器的姿态测量和控制,确保飞行安全。
机器人姿态传感器:用于机器人的姿态感知和控制,实现机器人的自主导航和动作协调。
虚拟现实/增强现实姿态传感器:用于跟踪用户的头部和手部姿态,提供沉浸式的虚拟现实或增强现实体验。
运动追踪姿态传感器:在运动追踪系统中使用,实时测量运动员或运动物体的姿态信息,为运动分析和训练提供数据支持。
医疗设备姿态传感器:在医疗设备中用于监测患者的姿态和运动情况,为医疗诊断和治疗提供辅助信息
姿态传感器的使用注意事项
环境要求
避免强磁场:姿态传感器对磁场敏感,应避免将其放置在磁力较大的区域,以防止磁场干扰导致数据异常。
适宜的温度范围:传感器应在规定的温度范围内使用,避免在温度过高或过低的环境中使用,以保证测量精度和稳定性。
连接与供电
正确连接:在连接姿态传感器时,应确保传感器与目标设备的连接稳固可靠,接口无松动。使用适当的电缆或接口进行连接,避免连接错误导致的数据传输问题。
稳定供电:传感器的供电电压应符合规定范围,并确保电源稳定。避免电压波动或电源不稳定对传感器性能造成影响。
操作与设置
初始化与参数设置:在使用姿态传感器之前,需要进行初始化操作,并根据目标设备的要求设置传感器的相关参数。这包括设置测量范围、采样率、滤波方式等,以确保传感器能够正常工作并满足应用需求。
选择合适的测量模式:根据应用需求选择合适的测量模式,如静态测量、动态测量等。不同的测量模式对数据的处理和输出方式有所不同,需要根据实际情况进行选择。
数据处理与存储
实时读取数据:使用设备的软件或编程接口实时读取传感器提供的姿态数据。确保数据的准确性和实时性,以便进行后续处理和分析。
数据备份与存储:定期备份和存储姿态数据,以防止数据丢失或损坏。同时,对重要数据进行加密处理,确保数据安全。
维护与校准
定期检查与维护:定期检查传感器的连接接口、电缆等部件是否完好,确保传感器处于良好的工作状态。同时,注意传感器的清洁和保养,避免灰尘和污垢对传感器性能造成影响。
定期校准:定期进行传感器的校准工作,以消除传感器的偏差和误差。校准过程应严格按照厂家提供的指南进行,确保校准结果的准确性和可靠性。
其他注意事项
避免液体接触:避免将姿态传感器与水或其他液体接触,以防止传感器内部电路受损或腐蚀。
注意用户安全:在使用姿态传感器时,应注意用户安全。确保传感器不会对人体造成伤害或不适,特别是在涉及高速旋转或剧烈运动的应用场景中。
姿态传感器的选型参数
测量范围
加速度测量范围:常见的范围包括±2g、±4g、±8g、±16g等。根据应用场景的不同,选择合适的加速度测量范围以避免测量误差。
角速度测量范围:通常以度/秒(°/s)为单位,如±250°/s、±500°/s、±1000°/s、±2000°/s等。选择适合应用需求的角速度测量范围。
磁力计测量范围(对于包含磁力计的传感器):通常以微特斯拉(μT)为单位,如±4800μT、±1300μT等。
分辨率
分辨率决定了传感器能够检测到的最小变化量。分辨率越高,测量精度越高,但成本也会相应增加。根据应用需求选择合适的分辨率。
精度
精度是传感器输出值与实际值之间的偏差程度。选择高精度的传感器可以确保测量结果的准确性。
稳定性与漂移
稳定性:指传感器在长时间工作过程中保持测量精度的能力。
漂移:指传感器输出值随时间或环境条件变化而发生的偏移。选择稳定性好、漂移小的传感器可以提高系统的可靠性。
抗干扰能力
在嘈杂环境下,抗干扰能力强的传感器能够减少外部因素对测量结果的影响,提高测量精度。
通信协议
选择与系统兼容的通信协议,如I2C、SPI等,以确保传感器能够顺利与主控芯片或其他设备进行数据传输。
电源需求
考虑传感器的电源需求,包括供电电压、电流消耗等。确保系统能够提供足够的电源支持。
尺寸与重量
根据应用场景的空间限制和重量要求选择合适的传感器尺寸和重量。
附加功能
一些姿态传感器还具备跌落检测、超动态检测等附加功能。根据应用需求选择是否需要这些功能。
示例型号及参数
MPU6050:集成了三轴加速度计和三轴陀螺仪,加速度度量范围±2g/±4g/±8g/±16g,角速度度量范围±250°/s、±500°/s、±1000°/s、±2000°/s,接口类型I2C/SPI。
MPU9250:集成了三轴加速计、三轴陀螺仪和三轴磁力计,加速度度量范围与MPU6050相同,角速度度量范围也相同,磁力计测量范围±4800μT,接口类型同样为I2C/SPI。
BMX055:集成了三轴加速计、三轴陀螺仪和三轴磁力计,加速度度量范围与上述型号相似,角速度度量范围包括±125°/s、±250°/s等更宽的选择,磁力计测量范围±1300μT,接口类型也为I2C/SPI。
姿态传感器的厂商
Honeywell
简介:霍尼韦尔是一家在航空航天、工业自动化、安全系统等多个领域具有领先地位的跨国公司。其姿态传感器产品以高精度、高稳定性和可靠性著称,广泛应用于航空航天、工业自动化等领域。
产品特点:可能包括高精度、高稳定性、低噪声等特点,能够满足复杂环境下的姿态测量需求。
简介:意法半导体是全球领先的半导体解决方案提供商之一,专注于模拟、微控制器和功率半导体等领域。其姿态传感器产品种类丰富,性能优异,广泛应用于消费电子、汽车电子等领域。
产品特点:可能包括集成度高、功耗低、性能稳定等特点,能够满足不同应用场景的需求。
简介:InvenSense是一家专注于运动跟踪解决方案的领先半导体公司,其产品在智能手机、平板电脑、可穿戴设备等消费电子产品中广泛应用。InvenSense的姿态传感器以其高性能和低功耗著称。
产品特点:可能包括高精度、低功耗、快速响应等特点,能够提供实时的姿态数据支持。
NXP Semiconductors(恩智浦半导体)
简介:恩智浦半导体是一家全球领先的半导体公司,专注于高性能混合信号和标准产品解决方案。其姿态传感器产品可能也具有一定的市场份额和竞争力。
产品特点:根据市场定位,可能具备高精度、高集成度等特点,适用于多种应用场景。
简介:博世传感器技术是博世集团旗下的子公司,专注于传感器技术和解决方案的研发与生产。其姿态传感器产品可能具有较高的精度和稳定性,广泛应用于汽车、工业等领域。
产品特点:可能包括耐用性高、适应性强等特点,能够满足复杂环境下的姿态测量需求。
其他厂商
除了上述厂商外,还有如MEMSIC、ADI、Microstrain、KVH Industries等公司在姿态传感器领域也具有一定的实力和市场份额。这些公司可能在不同的应用领域或技术方向上有所专长,为市场提供多样化的姿态传感器解决方案。
供应商A:上海矽睿科技股份有限公司(QST)
www.qstcorp.com
1、产品能力
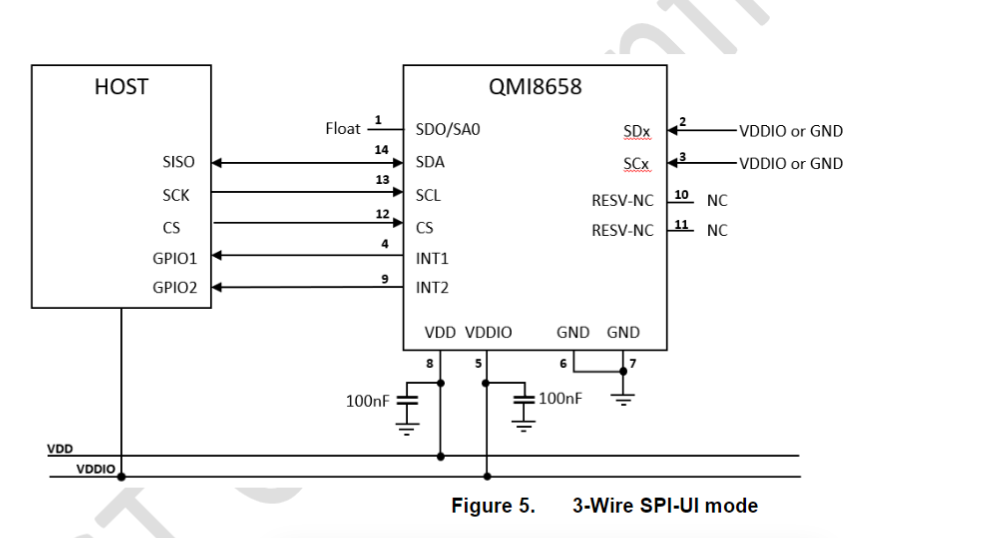
主推型号1:QMI8658
对应的产品详情介绍
QMI8658是一款低噪声、高带宽的六轴惯性测量单元(IMU),包含一个三轴陀螺仪和一个三轴加速计,采用2.5 x 3.0 x 0.86 mm 14-pin LGA 封装。支持多种通讯接口:I3C、I2C和SPI。内置AttitudeEngine,可满足惯性导航高精度低功耗的要求,即使在低速率情况下的数据输出也可保持高精度。
QMI8658带自校准九轴传感器融合和系统级定位精度,是高性能消费品和工业应用的理想选择。
可应用于:智慧手机、智慧可穿戴设备、TWS耳机、游戏手柄、空鼠、无人机、扫地机器人、摄像头、升降桌、二轮电动车、投影仪、平板、T-box等,实现运动姿态解算,手势或头部姿势识别与追踪,倾斜角度检测等作用。
产品特点
· 高集成、小尺寸的封装形式:2.5 x 3.0 x 0.86 mm 14- pin LGA
· 低噪声:陀螺仪低噪声15 mdps/√Hz与低延迟
· 接口可灵活选择:支持MIPI™ I3C, I2C, 和 3-wire 或 4-wire SPI
· 陀螺仪动态范围±16°/s 至 ±2048°/s, 加速度计动态范围±2 g 至 ±16 g
· 运行温度范围广:-40°C~85°C,在高低温环境中,保持灵敏度
· 内置温度传感器与补偿算法
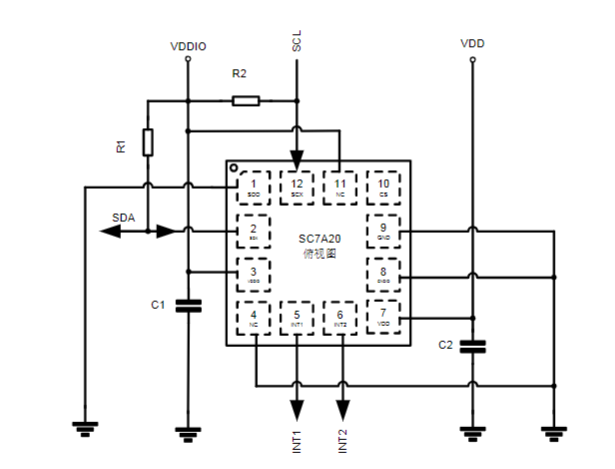
硬件参考设计
2、支撑
技术产品
供应商B:Invensense
https://invensense.tdk.com/
1、产品能力
(1)选型手册
https://invensense.tdk.com/smartmotion/
(2)主推型号1: MPU6050
对应的产品详情介绍
MPU6050是InvenSense推出的集成6轴运动处理组件,即三轴MEMS陀螺仪传感器和三轴MEMS加速度传感器,相较于多组件方案,集成模块可以免除各个组件时间轴之差的问题,还能大大减小封装的空间。它含有一个副IIC接口,可用于连接外部磁力传感器,利用自带数字运动处理器(DMP,Digital Motion Processor的缩写)硬件加速引擎,通过主IIC接口,可以向应用端输出完整的9轴姿态融合演算数据。
MPU6050 的特点
① 以数字形式输出 6 轴或 9 轴(需外接磁传感器)(注2)的旋转矩阵、四元数(quaternion)、欧拉角格式(Euler Angle forma)的融合演算数据(需 DMP 支持)。
② 具有 131 LSBs/°/sec 敏感度与全格感测范围为±250、±500、±1000 与±2000°/sec 的 3 轴角速度感测器(陀螺仪)。
③ 集成可程序控制,范围为±2g、±4g、±8g 和±16g 的 3 轴加速度传感器。
④ 移除加速器与陀螺仪轴间敏感度,降低设定给予的影响与感测器的飘移。
⑤ 自带数字运动处理引擎可减少MCU复杂的融合演算数据、感测器同步化、姿势感应等的负荷。
⑥ 内建运作时间偏差与磁力感测器校正演算技术,免除了客户须另外进行校正的需求。
⑦ 自带一个数字温度传感器。
⑧ 带数字输入同步引脚(Sync pin)支持视频电子影像稳定技术与 GPS。
⑨ 可程序控制的中断(interrupt),支持姿势识别、摇摄、画面放大缩小、滚动、快速下降中断、high-G 中断、零动作感应、触击感应、摇动感应功能。
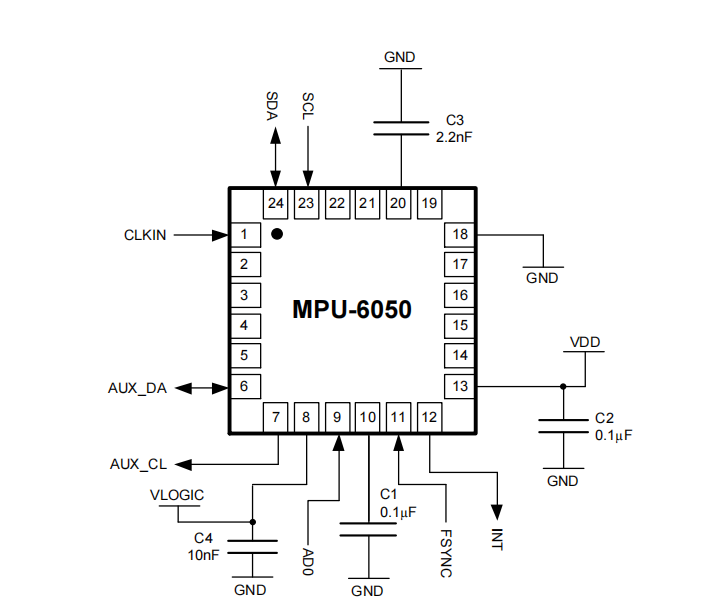
⑩ VDD 供电电压为 2.5V±5%、3.0V±5%、3.3V±5%;VLOGIC 可低至 1.8V± 5%。
⑪ 陀螺仪工作电流:5mA。
⑫ 自带 1024 字节 FIFO,有助于降低系统功率。
⑬ 400Khz 的 IIC 通信接口。
注2:三轴 = 3轴陀螺仪
六轴 = 3轴加速度计 + 3轴陀螺仪
九轴 = 3轴加速度计 + 3轴陀螺仪 + 3轴磁力计

硬件参考设计
核心料(哪些项目在用)
奇迹物联叉车监控项目
2、支撑
技术产品
技术资料
本文章源自奇迹物联开源的物联网应用知识库Cellular IoT Wiki,更多技术干货欢迎关注收藏Wiki:Cellular IoT Wiki 知识库(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
欢迎同学们走进AmazIOT知识库的世界!
这里是为物联网人构建的技术应用百科,以便帮助你更快更简单的开发物联网产品。
Cellular IoT Wiki初心:
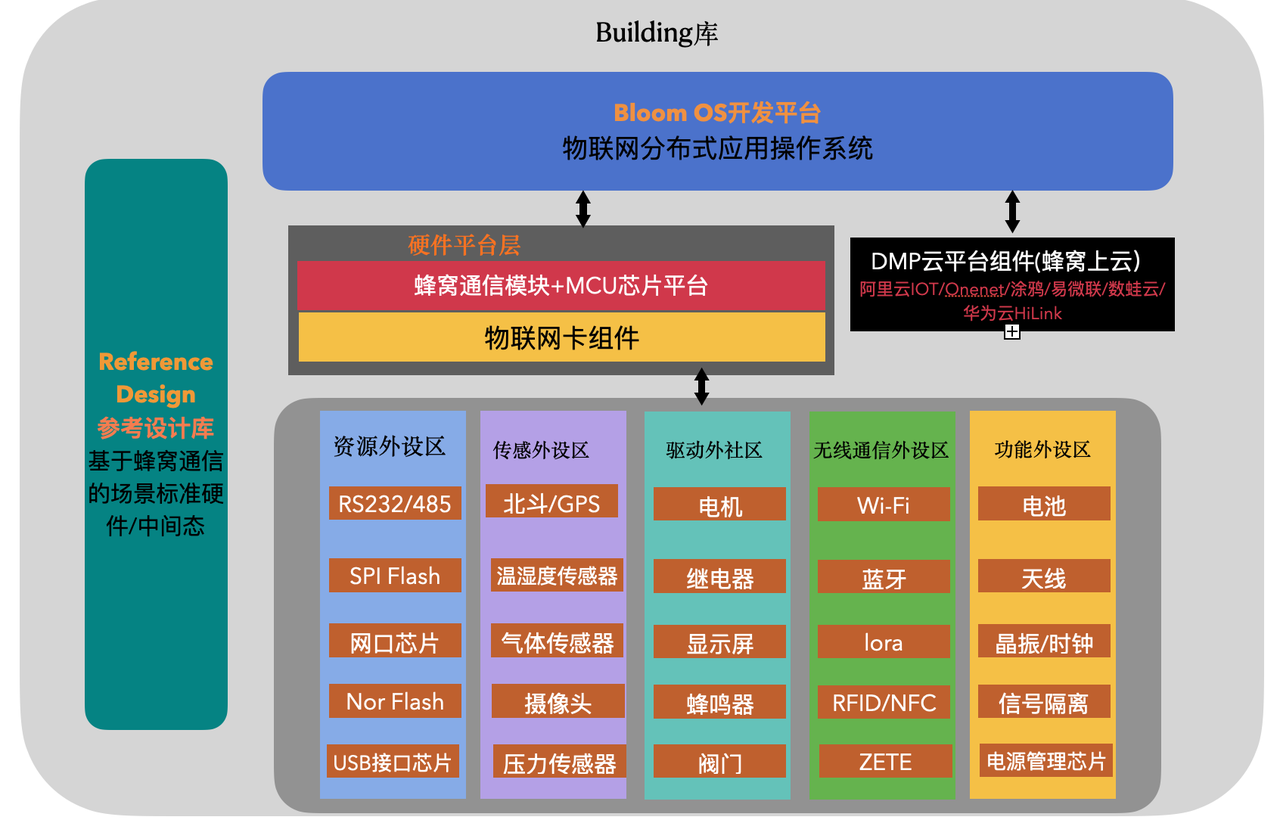
在我们长期投身于蜂窝物联网 ODM/OEM 解决方案的实践过程中,一直被物联网技术碎片化与产业资源碎片化的问题所困扰。从产品定义、芯片选型,到软硬件研发和测试,物联网技术的碎片化以及产业资源的碎片化,始终对团队的产品开发交付质量和效率形成制约。为了减少因物联网碎片化而带来的重复开发工作,我们着手对物联网开发中高频应用的技术知识进行沉淀管理,并基于 Bloom OS 搭建了不同平台的 RTOS 应用生态。后来我们发现,很多物联网产品开发团队都面临着相似的困扰,于是,我们决定向全体物联网行业开发者开放奇迹物联内部沉淀的应用技术知识库 Wiki,期望能为更多物联网产品开发者减轻一些重复造轮子的负担。
Cellular IoT Wiki沉淀的技术内容方向如下:
奇迹物联的业务服务范围:基于自研的NB-IoT、Cat1、Cat4等物联网模组,为客户物联网ODM/OEM解决方案服务。我们的研发技术中心在石家庄,PCBA生产基地分布在深圳、石家庄、北京三个工厂,满足不同区域&不同量产规模&不同产品开发阶段的生产制造任务。跟传统PCBA工厂最大的区别是我们只服务物联网行业客户。
连接我们,和10000+物联网开发者一起降低技术和成本门槛
让蜂窝物联网应用更简单~~
哈哈你终于滑到最重要的模块了,
千万不!要!划!走!忍住冲动!~
欢迎加入飞书“开源技术交流群”,随时找到我们哦~
点击链接如何加入奇迹物联技术话题群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以获取加入技术话题群攻略
Hey 物联网从业者,
你是否有了解过奇迹物联的官方公众号“eSIM物联工场”呢?
这里是奇迹物联的物联网应用技术开源wiki主阵地,欢迎关注公众号,不迷路~
及时获得最新物联网应用技术沉淀发布
(如有侵权,联系删除)
审核编辑 黄宇
-
陀螺仪
+关注
关注
44文章
791浏览量
98944 -
物联网
+关注
关注
2913文章
44915浏览量
376698
发布评论请先 登录
相关推荐
十轴姿态传感器模块 | 集成加速度计、陀螺仪、磁力计,自带BLE5.0蓝牙

飞凌嵌入式ElfBoard ELF 1板卡-运动追踪之六轴传感器icm20607介绍
XC1011SD (X2E0000210002) 爱普生汽车用角速度_加速度组合传感器选型资料
陀螺仪LSM6DSV16X与AI集成(11)----融合磁力计进行姿态解算

爱普生(EPSON) 惯性测量单元(IMU)、陀螺仪传感器等模块应用领域选型介绍

爱普生(EPSON)陀螺仪传感器的特点和应用领域介绍
用ADXL354C的8g量程测量时,静态加速度测量值与理论不符是什么原因?
陀螺仪传感器-它们是如何工作的,未来会发生什么
陀螺仪传感器,IMU和加速度计的产品和选型






 工商网监
工商网监
评论