 物联网行业中的电机家族成员解密(二)_步进电机篇
物联网行业中的电机家族成员解密(二)_步进电机篇
物联网系统中使用电机可以提高设备的智能化水平,实现远程控制、自动化控制、故障诊断、预测维护等功能,从而提高生产效率、降低维护成本、提高生活质量。
物联网系统中的电机应用方案通常涉及到电机控制、监测和维护等方面。以下是一些常见的物联网电机应用方案:
智能家居:在智能家居中,物联网电机可以用于控制窗帘、窗户、门锁等设备的开关。通过物联网技术,可以实现远程控制、定时控制、场景控制等功能,提高家居的智能化水平。
工业自动化:在工业自动化中,物联网电机可以用于控制生产线、物流输送线等设备的运行。通过物联网技术,可以实现设备的远程监控、故障诊断、预测维护等功能,提高生产效率和降低维护成本。
智能交通:在智能交通中,物联网电机可以用于控制信号灯、路灯、广告牌等设备的开关。通过物联网技术,可以实现设备的远程控制、自适应控制等功能,提高交通的安全性和效率。
智能农业:在智能农业中,物联网电机可以用于控制灌溉系统、通风系统、遮阳系统等设备的运行。通过物联网技术,可以实现设备的远程监控、自动化控制等功能,提高农业的生产效率和降低劳动成本。
本文会再为大家详解电机家族中的重要成员——步进电机。
步进电机的定义
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,这个固定的一个角度称为步距角,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。
根据电源的不同,电机可以分为交流电机和直流电机。而步进电机则属于直流电机,因为步进电机有一个固定的磁极方向,需要反复改变电流的流向才能实现旋转,而直流电机则是利用直流电流产生磁力而旋转的。虽然步进电机需要使用驱动器产生脉冲信号,但仍然是属于直流电机的一种。总之,步进电机是属于直流电机的一种,它具有精准控制、高速稳定运动、重量小等特点,适用于许多精密运动控制领域。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
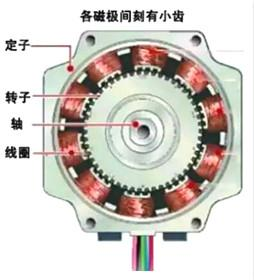
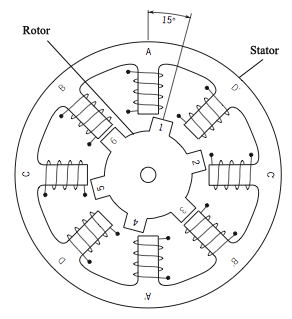
步进电机是一种同步电机,其结构同其它电机一样,由定子(定子铁心+绕组)和转子组成;定子为激磁场,其激磁磁场为脉冲式;转子通常为永磁体。
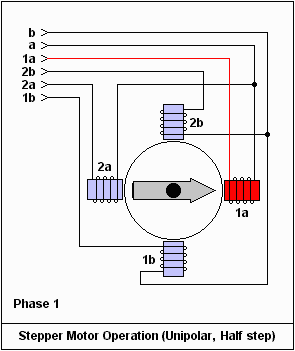
当电流流过定子绕组时,定子绕组产生一矢量磁场。由于同极互斥,该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度,转子也随着该磁场转一个角度。
步进电机的分类
按照转子分类
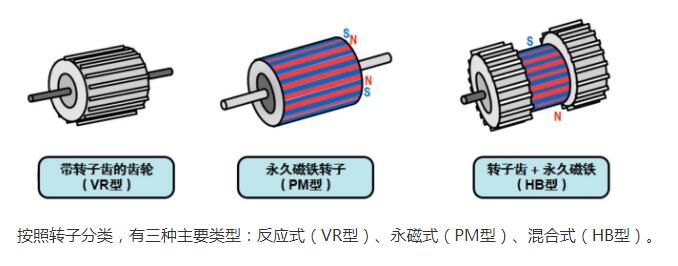
(1) 反应式步进电机(VR):定子上有绕组,绕组由软磁材料组成。其结构简单、成本低、步距角小,可达1.2度,但动态性能差,效率低、发热大,可靠性难以保证。
(2) 永磁式步进电机(PM):永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机度差,步距角大(一般为7.5度或15度)。
(3) 混合式步进电机(HB)。混合式步进电机综合了反应式、永磁式步进电动机两者的优点,其定子上有很多相绕组,转子上采用永磁材料,转子和定子均有多个小齿以提高步距精度。其特点是输出力矩大、动态性能好、步距角小,但结构复杂、成本相对较高。
按照定子上绕组分类:
共有二相、三相和五相等系列。目前受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
步进电机的性能
a. 控制精度: 步进电机的相数和拍数越多,它的精确度就越高(步距角越小,精度越高)。
b. 低频特性: 步进电机在低速时易出现低频振动现象,当它工作在低速时一般采用阻尼技术或细分技术来克服低频振动现象。
c. 矩频特性: 步进电机输出力矩随转速的升高而下降,高速时会急剧下降。
d. 过载能力: 步进电机不具备过载能力。
e. 运行性能: 步进电机的控制为开环控制,启动频率过高或负载过大易丢步或堵转的现象,停止时转速过高易出现过冲现象。
f. 速度响应性能: 步进电机从静止加速到工作转速需要上百毫秒。
步进电机的基本参数
a.步距角:
表示控制系统每发一个步进脉冲信号,电机所转动的角度。
θ s = 180 ° / P N r
其中,θs为步进电机步距角;P为定子相数;Nr为转子极对数(即转子极数除以2)。
注:在反应式步进电机中,步距角不能用上式计算,而是上式的两倍。即分辨率与永磁式及混合式相比,虽然转子齿数相同,但反应式只有一半。
注:在混合式步进电机中,Nr为转子齿数。
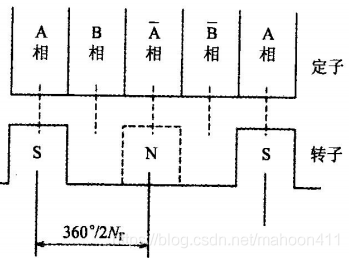
上述公式的物理意义为:转子旋转一周的机械角度为360°,如用极数2Nr去除,相当于一个极所占的机械角度为180°/Nr。也就是说,一个极的机械角度用定子相数去分割,就得到了步距角.
又由上式可知,要提高步进电机的分辨率,就要增加转子极对数Nr或增加定子相数P。而增加Nr收到机械加工的限制,所以要制造高分辨率的步进电机需要两种方法并用。
b. 相数:
指定子相数,即可独立通电的定子电磁圈数,x相即有x个绕组。电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72°。在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己步距角的要求。如果使用细分驱动器,则‘相数’将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。
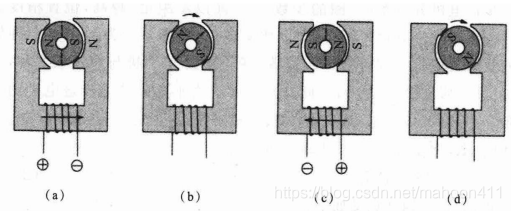
单相步进电机
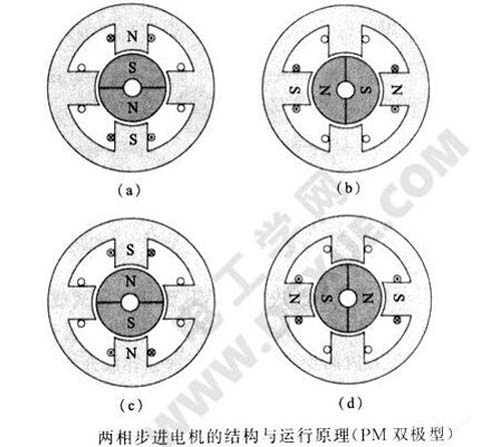
两相步进电机
c.拍数:
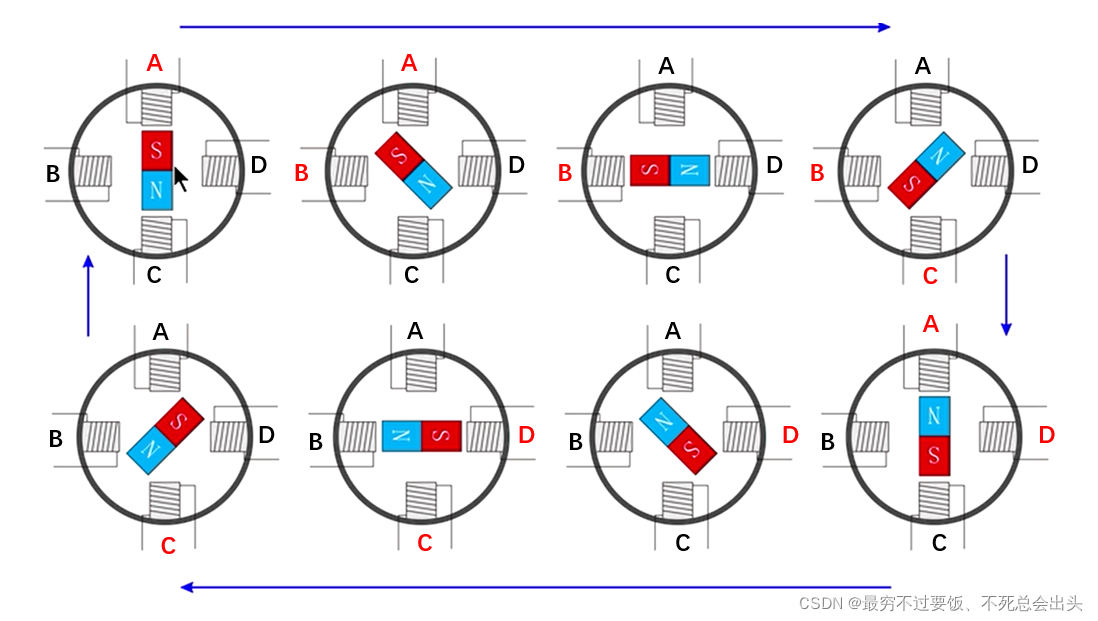
完成一个磁场周期性变化所需脉冲数或导电状态,用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
四拍驱动:这是最简单的步进电机驱动方式。这种方式,电机在每个瞬间只有一个线圈导通。
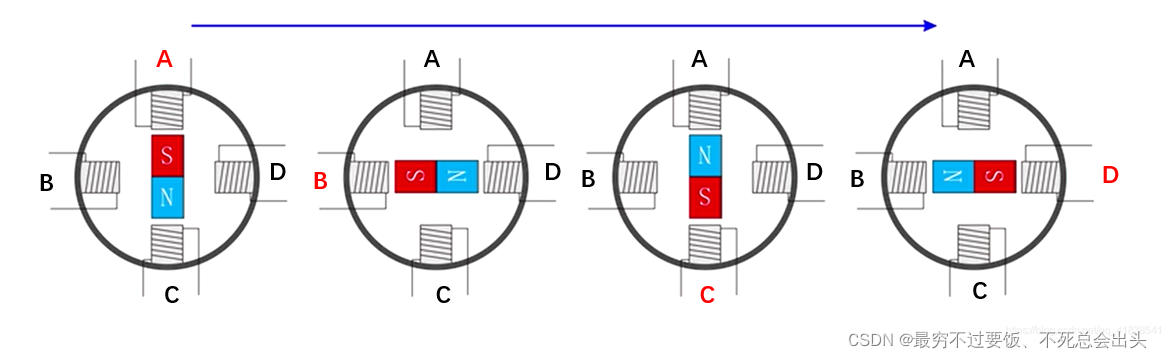

按顺序给相应引脚拉高(1)拉低(0)。 一个拉高,其他三个拉低。
八拍驱动:就是在上述四拍切换过程中穿插两个线圈同时拉高的情况。

d.保持转矩(最大静力矩):
是指步进电机通电但没有转动时,定子锁住转子的力矩。通常步进电机在低速时的力矩接近保持转矩。保持转矩是衡量步进电机最重要的参数之一。
e.DETENT TORQUE:指步进电机没有通电的情况下,定子锁住转子的力矩。由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE(定位力矩)。
f.额定电流:
指电机可以长期连续工作的电流。比如说某个电机的额定电流为4A,你如果在驱动器上面选的是2.25A,那么电机的力气不能达到它本来的力矩,但你设成5A,力气虽然大了,但相对的电机发热也变大了,电流这个设置需要根据实际情况来设置。一般小负载低转速设小电流,而高负载改转速则需大电流。没有什么数学公式,都是根据实际情况来设定的。
g.额定电压:
指电机可以长期连续工作的电压。
h.空载启动频率:
电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。如果脉冲频率高于该值,电机不能正常启动,可能发生失步或堵转。
i.空载运行频率:
电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
j.矩频特性:
电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。其它特性还有惯频特性、起动频率特性等。
电机一旦选定,电机的静力矩确定,而动态力矩却不然。电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。要使平均电流大,尽可能提高驱动电压,采用小电感大电流的电机。步进电机的动态转矩与驱动器的形式有很大的关系,因而选用时必须了解给出的性能指标是在何种型式的电源及驱动下测定的。
步进电机细分驱动控制
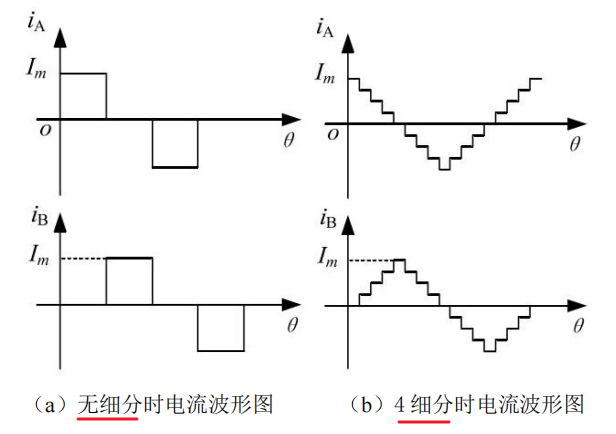
细分驱动技术通过控制各相绕组中的电流,使它们按一定的规律上升或下降,即在零电流到最大电流之间形成多个稳定的中间电流状态,相应的合成磁场矢量的方向也将存在多个稳定的中间状态,且按细分步距旋转。
随着细分数的增加,绕组电流的波形由原来的方波变为更平滑的拟正弦波,减小电机每一步运行的距离。
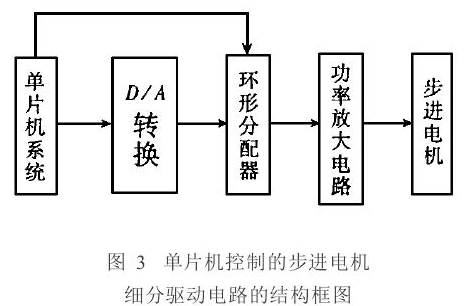
步进电机细分驱动电路大多数都采用单片微机控制,它们的构成框图如图2所示。单片机根据要求的步距角计算出各项绕组中通过的电流值,并输出到数模转换器(D/A)中,由D/A把数字量转换为相应的模拟电压,经过环形分配器加到各相的功放电路上,控制功放电路给各相绕组通以相应的电流,来实现步进电机的细分。
步进电机细分驱动电路大多数都采用单片微机控制,它们的构成框图如图2所示。单片机根据要求的步距角计算出各项绕组中通过的电流值,并输出到数模转换器(D/A)中,由D/A把数字量转换为相应的模拟电压,经过环形分配器加到各相的功放电路上,控制功放电路给各相绕组通以相应的电流,来实现步进电机的细分。
细分的优点:
1)细分提高了定位精度,使步距角减小,从而使步进电机每一步的运行更加平稳。
2)细分还能能够大大提高电机的运转性能,减小或者消除了低频振动和噪声。以二相混合式步进电机为例,如果电机额定电流是5A,采用常规驱动方式时,电机每运行一次,其绕组相电流将从0突变至5A或从5A变为0,这种电流的突然变化,势必会引起电机运行的振动。若采用细分技术,如果是50细分的话,电机运行一步,其绕组相电流变化只要0.1A,这样可以大大改善电机的振动情况。
3)同时细分后,电机的输出力矩实际上是增加的,特别是对于三相式反应时电机,其力矩比不细分时提高约30-40%。
8、步进电机控制系统
步进电机控制系统通常由步进电机控制器、步进电机驱动器、步进电机三部分组成。
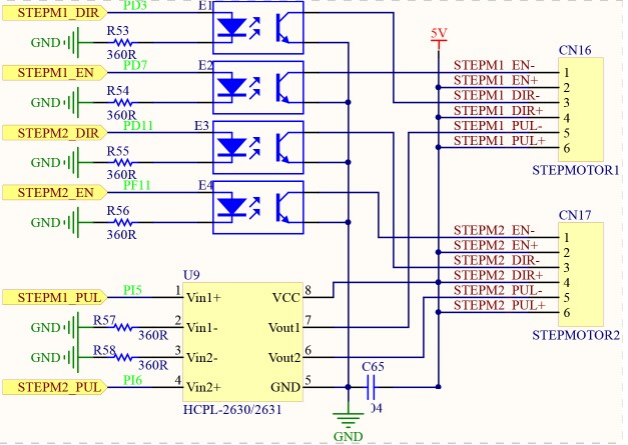
由于步进电机具有电磁特性,容易给单片机的控制电路带来干扰,影响控制系统的稳定性。因此系统选用光耦隔离电路使控制器的输出端与驱动器的输入端实现电气隔离。
控制器输出的控制信号包括,步进脉冲信号 PUL、方向信号 DIR、使能信号 EN。控制信号经过光耦隔离作为 TB6600 驱动器的输入。
其中脉冲信号需要选用高速光耦 HCPL-2630/2631 做隔离,对于 DIR 和 EN 这样一般性的电平信号,选用低速光耦 PC817 做隔离。
主流型号步进电机介绍
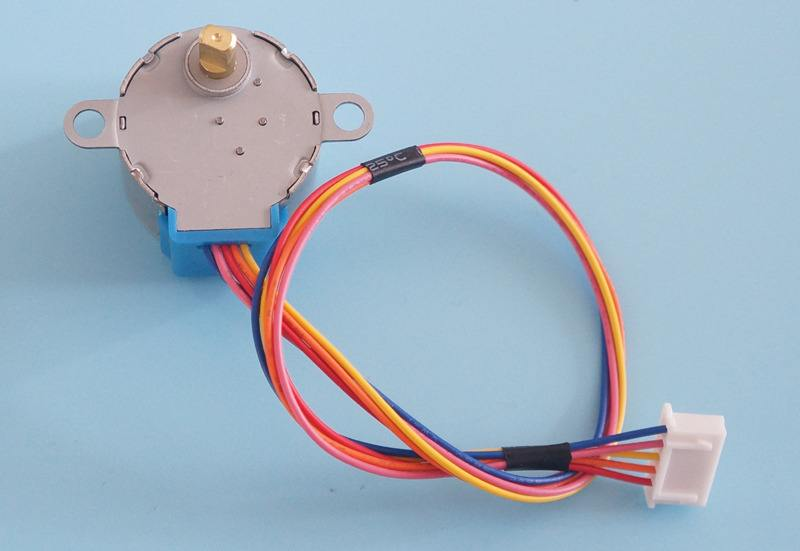
步进电机28BYJ-48名称含义:
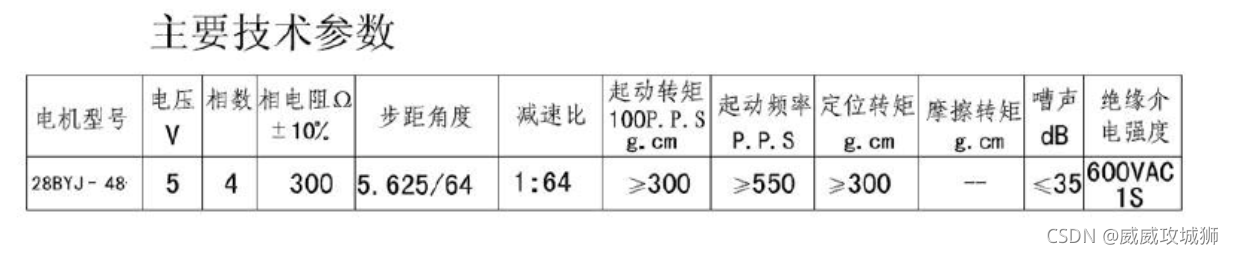
28:表示步进电机的有效最大外径为28毫米
B: 表示步进电机“步”字汉语拼音首字母
Y: 表示永磁式“永”字汉语拼音首字母
J: 表示减速型“减”字汉语拼音首字母
BYJ: 组合即为永磁式减速步进电机
48:表示四相八拍
5V:表示额定电压为5V,且为直流电压
步进角:5.625度,就是1个脉冲信号转5.625度,64个信号转360度。
减速比:1/64,电机壳里边的电机转64圈,电机壳外边的部分转1圈。
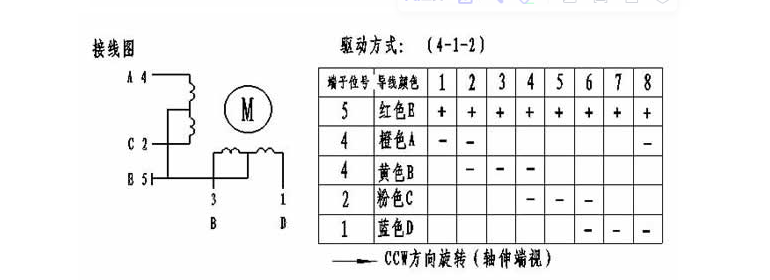
四相:ABCD四相(电机定子上有8个齿,相对的2个齿是1相),
八拍:(A-AB-B-BC-C-CD-D-DA-A)。
一拍就是一个脉冲信号,完成一个循环用8个脉冲信号。
当通电状态的改变完成一个循环时,转子转过一个齿距。转8个齿距就是一圈,8×8=64
64拍,64个脉冲信号转一圈360度。
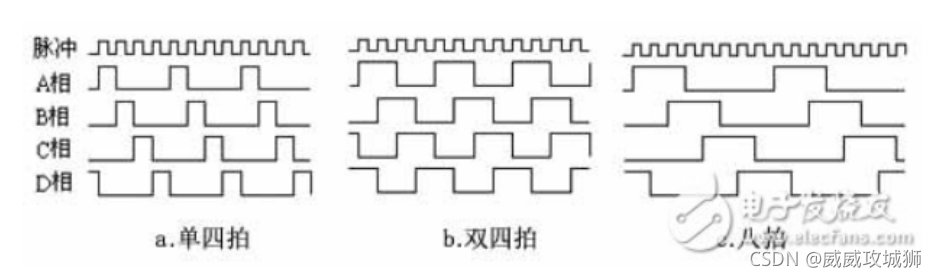
我们使用的28BYJ-48是一种4 相 5 线的步进电机,是减速步进电机 ,减速比为 1:64,步进角为 5.625/64 度。如果需要转动1圈,那么需要360/5.625*64=4096 个脉冲信号。四相步进电机按照通电顺序的不同,可分为单四拍(单拍)、双四拍(双拍)、八拍三种工作方式。单四拍与双四拍的步距角相等,但单四拍的转动力矩小。八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
驱动步进电机的方法
①1相励磁法:
每一瞬间只有一个线圈相通,其它休息。
优点:简单,耗电低,精确性良好。
缺点:力矩小,振动大,每次励磁信号走的角度都是标称角度。
1相励磁法 A->B->C->D
②2相励磁法:
每一瞬间有两个线圈导通。
优点:力矩大,震动小。
缺点:每励磁信号走的角度都是标称角度。
2相励磁法 AB->BC->CD->DA
③1-2相励磁法:
1相和2相交替导通。
优点)精度较高,运转平滑,每送一个励磁信号转动1/2标称角度,称为半步驱动。(前两种称为4相4拍,这一种称为4相8拍)
1-2相励磁法 A-->AB-->B->BC->C-->CD->D-->DA
正转和反转代码(1-2相励磁法)
逆时针:
u8 phasecw[8] =
{0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09};
//1000,1100,0100,0110,0010,0011,0001,1001
顺时针:
u8 phaseccw[8]=
{0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08};
// 顺时针
//1001,0001,0011,0010,0110,0100,1100,1000
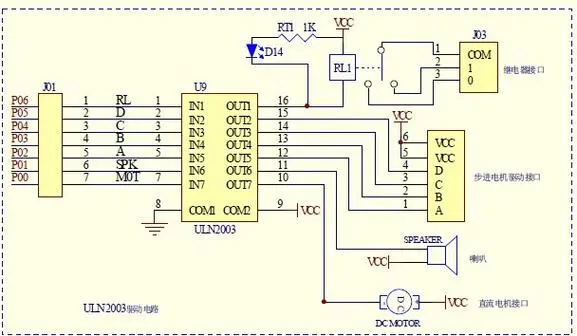
上图是ULN2003步进电机驱动模块,可以看到上面的标号分别是A,B,C,D,因此代码我们可以按这个顺序来理解。比如:AB是1100,BC是0110,CD是0011等
因为stm32的电流还达不到步进电机所需的最小电流,而ULN2003可以增大stm32的电流,提高驱动能力。
ULN2003是高耐压、大电流复合晶体管阵列,由七个硅NPN 复合晶体管组成,每一对达林顿都串联一个2.7K 的基极电阻,在5V 的工作电压下它能与TTL 和CMOS 电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
步进电机采用五线四相直流电速电机其中:电压为5V,步进角度为5.625°,减速比为1/64,所以步距角为5.625/64=0.087°。意思就是,电机内部的转自转过5.626°,但是由于减速64倍所以外部的轴只转动0.087°。所需脉冲是360/0.087=4096个,由于采用四相八拍驱动,因此八个脉冲为一个周期,所以外部转动一周需要4096/8=512个周期。
步进电机的厂商
以下是对步进电机十大名牌的介绍:
日本信浓:年销量超过 2400 万台,是 HB 步进电机的领先品牌。
日本美蓓亚三美:拥有超过 70 年的机电产品制造经验。
中国鸣志电器:作为国产 HB 步进电机的龙头企业,排名第三。
日本尼得科:成立于 1973 年,市值达到 4400 亿元。
日本山洋电气工业设备:电机巨头,排名第五。
日本东方马达:成立于 1885 年,是工业机器人和汽车电机的巨头。
日本多摩川:主要针对机器人行业应用。
美国阿美特克:因其步进电机精度高、推力大、所需空间小,广泛应用于医疗和实验室自动化。
瑞士 Sonceboz:汽车仪表步进电机供应商。
德国西门子:工业自动化电机的巨头,排名第十。
以上品牌在全球步进电机市场中占据领先地位,它们的产品广泛应用于数控机床、印刷设备、医疗器械、机器人等领域,以其高性能、高效率和稳定性而著称。
供应商A:步进电机-深圳市诚信电机有限公司
http://www.szcxmotor.com/
1、产品能力
(1)选型手册
http://www.szcxmotor.com/11/
(2)主推型号1:
对应的产品详情介绍
产品名称:24BYJ48
产品型号:24BYJ48
产品类别:BYJ永磁式步进电机
子型号详细参数:
表格 还在加载中,请等待加载完成后再尝试复制
硬件参考设计
2、支撑
(1)技术产品
技术资料
http://www.szcxmotor.com/352/65.html
本文章源自奇迹物联开源的物联网应用知识库Cellular IoT Wiki,更多技术干货欢迎关注收藏Wiki:Cellular IoT Wiki 知识库(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
欢迎同学们走进AmazIOT知识库的世界!
这里是为物联网人构建的技术应用百科,以便帮助你更快更简单的开发物联网产品。
Cellular IoT Wiki初心:
在我们长期投身于蜂窝物联网 ODM/OEM 解决方案的实践过程中,一直被物联网技术碎片化与产业资源碎片化的问题所困扰。从产品定义、芯片选型,到软硬件研发和测试,物联网技术的碎片化以及产业资源的碎片化,始终对团队的产品开发交付质量和效率形成制约。为了减少因物联网碎片化而带来的重复开发工作,我们着手对物联网开发中高频应用的技术知识进行沉淀管理,并基于 Bloom OS 搭建了不同平台的 RTOS 应用生态。后来我们发现,很多物联网产品开发团队都面临着相似的困扰,于是,我们决定向全体物联网行业开发者开放奇迹物联内部沉淀的应用技术知识库 Wiki,期望能为更多物联网产品开发者减轻一些重复造轮子的负担。
Cellular IoT Wiki沉淀的技术内容方向如下:
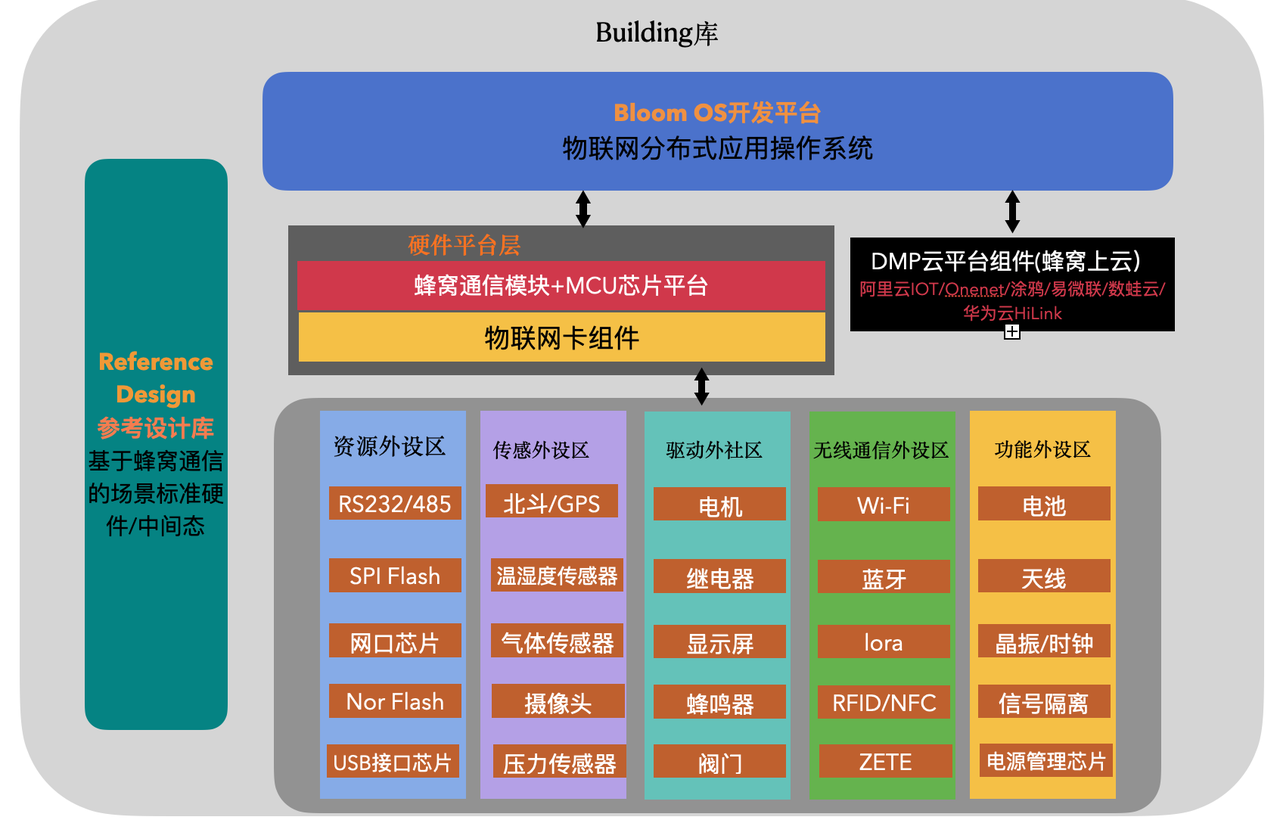
奇迹物联的业务服务范围:基于自研的NB-IoT、Cat1、Cat4等物联网模组,为客户物联网ODM/OEM解决方案服务。我们的研发技术中心在石家庄,PCBA生产基地分布在深圳、石家庄、北京三个工厂,满足不同区域&不同量产规模&不同产品开发阶段的生产制造任务。跟传统PCBA工厂最大的区别是我们只服务物联网行业客户。
连接我们,和10000+物联网开发者一起降低技术和成本门槛
让蜂窝物联网应用更简单~~
哈哈你终于滑到最重要的模块了,
千万不!要!划!走!忍住冲动!~
欢迎加入飞书“开源技术交流群”,随时找到我们哦~
点击链接如何加入奇迹物联技术话题群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以获取加入技术话题群攻略
Hey 物联网从业者,
你是否有了解过奇迹物联的官方公众号“eSIM物联工场”呢?
这里是奇迹物联的物联网应用技术开源wiki主阵地,欢迎关注公众号,不迷路~
及时获得最新物联网应用技术沉淀发布
(如有侵权,联系删除)
审核编辑 黄宇
-
物联网
+关注
关注
2916文章
45259浏览量
380453 -
步进电机
+关注
关注
152文章
3132浏览量
148282
发布评论请先 登录
相关推荐
行星减速步进电机与步进电机的区别

步进电机如何自适应控制?步进电机如何细分驱动控制?

什么是步进电机?步进电机的类型和结构
步进电机是什么意思
如何调整二相步进电机的步进角度,控制步进角度的功能?
二相步进电机步进角度调节,在各种精密控制系统的关键应用







 工商网监
工商网监
评论