 新能源整车控制器VCU开发过程详解
新能源整车控制器VCU开发过程详解
汽车轻量化带动车用改性塑料需求,汽车行业已经成为改性塑料需求增速最快的领域。改性塑料下游最大的应用领域是家电和汽车,在汽车轻量化的带动下汽车行业已经成为改性塑料需求增速最快的领域,预计未来几年国内车用改性塑料需求年平均增速将在15%以上。
一款合适的整车控制器需要正确的输入,一般车型不一样整车控制器的接口需求也不一样,因为整车控制器开发周期比较长,所以在整车控制器的研发起始阶段要考虑,所研发的整车控制器要有一定的兼容性,能适应较多车型。
1、从输入来看:需要整车设计需求+整车控制原理图


2、整车电气原理确定后,就确定了整车的控制方案,这时就可以确定整车控制器的接口功能:

3、整车控制接口定义确定后,内部功能也就确定
我们需用飞思卡尔16位双核单片机Mc9s12xep100 112脚作为主处理器,将CAN通讯收发发在协处理器XGATE中,主CPU只经行与控制策略有关的处理,这样就大大提高了控制的实时性。
原理图如下:

PCB图如下:
外观如图:
4、整车硬件部分完成后,接着进行软件的设计,主要包括:
A、底层软件的编写,主要是配置时钟、SPI、CAN、PIT、ECT、IO、interrupt等的寄存器。
B、BootLoader驱动,主要是CAN模块和Flash模块的配置。
C、CCP标定驱动。
D、应用程序包括:数据采集、故障诊断、工况判断、辅机管理、通讯控制;
程序截图:




5、整车控制器调试软件:
5.1、通过CAN总线进行程序下载更新的BootLoader软件,如图:

5.2、通过Busmaster监控,如图:
在编写控制软件前,应制定相应的控制策略、通讯协议:
1、通讯协议:

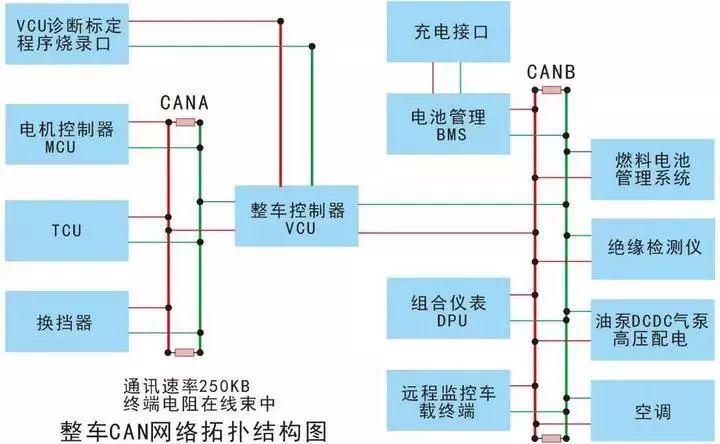
2、CAN通讯网络拓扑结构(此处预留燃料电池)
3、控制策略:

有了以上就可以就行控制软件的编写和调试的工作,调试匹配,本开发主要是针对新能源电动中巴、大巴、物流车车型,本次调试的车型为纯电动考斯特,如图:
1.调试阶段:
2.试车阶段:
试车视频
整个过程经历了1年的时间,过程中总是一个接一个的困难,记得刚开始做这个项目的时候,CAN通讯也不是很精通,急忙恶补了下,CAN底层代码也是修改了好久,还好板子的硬件部分还算比较给力,没出问题,在一些demo的基础上,进行了移植和修改,很快搭建出了具有一定功能的整车控制器,同时根据项目的需要,开发了基于CAN总线下载的Bootloader。也不断的优化换控制策略,这一块对油门、刹车的解析是一个难点,也是废了不少功夫。
经过以上,形成了如下开发包。
-
新能源汽车
+关注
关注
141文章
10530浏览量
99461 -
控制器
+关注
关注
112文章
16350浏览量
177952 -
VCU
+关注
关注
17文章
80浏览量
20549
原文标题:【苏达汇诚·高工纵横】详解新能源整车控制器VCU开发过程
文章出处:【微信号:gh_a6b91417f850,微信公众号:高工锂电技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
光隔离探头在新能源汽车电机控制器的双脉冲测试应用实例

NTC温度传感器:护航新能源汽车电池安全运行
新能源汽车控制器详解:VCU、ECU、MCU和电池BMS
解决方案丨EasyGo新能源系统实时仿真应用
新能源汽车电机控制器(MCU)

解决方案丨PPEC车载DCDC转换器:新能源汽车的高效能源动力系统
新能源汽车之整车控制器VCU到底有什么用?


【换道赛车:新能源汽车的中国道路 | 阅读体验】 新能源到底新在何处?新能源在国内如何发展?
联合电子推出面向跨域融合的新一代整车运动域控制器VCU8.6平台

从0到1实现VCU:新能源汽车整车控制器






 工商网监
工商网监
评论