 使用u-blox ZED-F9R模块测试高精度定位性能
使用u-blox ZED-F9R模块测试高精度定位性能
精准定位解决方案一直以实施难度大而著称。我们的分步实施指南将通过高效、简便的方式指导您完成整个过程的每一步。
在最近的一篇文章中,我们介绍了 OpenMower 平台,这是使用 u-blox ZED-F9R 模块测试高精度定位性能的一种快速简便的方法。但如果您想从头开始创建一个厘米级定位解决方案,以适应特定应用的设计限制,应该怎么做?正确设置 GNSS 接收机、校正服务接收机、校正服务和惯性传感装置最初可能让人望而生畏,即使对于拥有开发标准 GNSS 解决方案经验的公司来说,也不例外。
不过好消息是,我们会为您提供支持。我们的入门指南将指引您完成整个过程的每一步,从最初的采购清单,一直到解决方案启动和运行后您要注重的细节。
服务机器人、电动滑板车及更多……
我们首先简单介绍一下 ZED-F9R 模块:ZED-F9R 是 u-blox 在过去几年中推出的众多高精度定位解决方案之一,这款模块将一度仅有高价值应用才能实现的定位性能带入了大众市场。该模块专为在最具挑战性的应用中提供高精度 GNSS 定位而打造,并且针对服务机器人和电动滑板车等慢速移动应用进行了优化。
ZED-F9R 结合了能同时跟踪多达四个 GNSS 星座的多频段 GNSS 系统和惯性传感器技术,可以弥补临时信号中断,从而显著缩短了开发可靠的厘米级定位解决方案所需的时间。以下一些建议可以帮您迈出第一步。
首先准备好所有必备元器件
ZED-F9R
GNSS 技术具有其独特的优势,只需要两个组件就能确定地球上任何地方的位置:一个 GNSS 接收机和一根天线。其他一切服务都由国家出资建设的基础设施免费提供,其中大部分基础设施都在太空中运行。
开发高精度定位解决方案的购物清单有点长。但正如您将在本文中看到的那样,ZED-F9R 提供的高度技术集成消除了许多复杂性。
当然,您需要一个可以正常工作的 ZED-F9R 模块。我们的 C102-F9R 评估套件对于首次接触这个方面的用户是很好的起点,可提供能满足大多数用途的、经过测试的即用型设备。如果您选择定制 PCB,应确保该模块包括与接收机的 UART 连接,最好还支持 USB。
C102-F9R 评估套件
其次,一定要选择合适的天线。您需要增益至少为 17 dB 的多频段 L1 和 L2 天线,以便为 GNSS 接收机模块正确提供信号。其设计应该考虑到了 RTK(实时动态)应用,可能需要天线周边铺地来实现最佳性能。ANN-MB 就是很好的起点。
ANN-MB
然后,您还需要通信信道,以便将车辆的里程测量数据传送给 GNSS 接收机,这是高精度定位不可或缺的一环。其形式可以是用于轮速脉冲和方向的专用硬件引脚,也可以是串行接口。
为实现厘米级定位,您需要 GNSS 校正数据。校正数据的来源多种多样,包括本地 GNSS 基准站,或是订阅式 GNSS 校正服务。

u-center
最后,为了进行开发和测试,您需要一台主机,例如一台运行 u-center 并与接收机进行串行通信连接的 PC。使用嵌入式主机取代 PC 时,不要忘记在最终设计中保留监测和调试功能。
设置解决方案,实现最佳精准定位性能
了解了如何将接收机连接到 u-center 以进行监测和配置(如文末的入门指南中所述)之后,您必须安装 GNSS 接收机和天线,以获得最佳性能。
只有要求最严苛的应用才注重接收机的位置。更重要的是接收机的方位,要正确使用惯性传感器数据,必须测量接收机的方位,确保其误差在几度以内。
为了在解决方案的整个生命周期内保证可靠的性能,请确保接收机牢固地固定在车架上,并防止过度振动。
为了保证可靠的性能,天线的位置尤为重要。天线应放置在拥有清晰天空视野的位置。将天线尽可能靠近接收机可以进一步提高性能。
测试 GNSS 信号接收情况
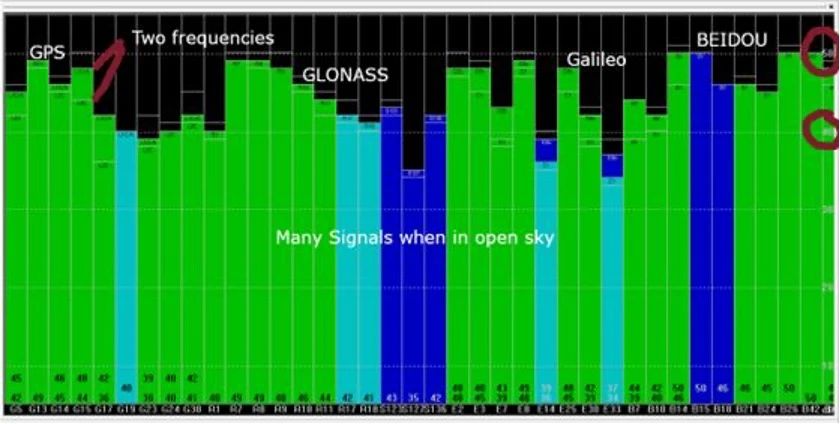
安装好硬件、建立与增强服务的连接并配置好通信接口后,即可使用 u-center 测试 GNSS 信号接收情况了。先将接收机与 u-center 连接,然后前往一个视野开阔的地点,等待接收机建立 3D 定位,并检查可用的卫星信号。
如果您在多个频段上接收到至少 20 个符合预期的星座信号,且平均载波噪声比 C/N0 至少达到 40,则表示 GNSS 信号接收情况良好。但如果信号质量很差,则应先改善信号质量再继续。请记住,在所有情况下,GNSS 信号不好都会导致导航性能低下。如果接收到的 GPS 信号质量较差,可能的原因是天线选择不当、天线周边铺地缺失和天线布设不当。
设置校正数据源
接收机需要连续的 GNSS 校正数据流,这样才能提供适当的 RTK 性能。在本文中,我们将介绍利用 NTRIP(通过互联网协议进行的 RTCM 网络传输)协议发送校正数据的关键要点。下一篇文章将更具体地介绍通过 MQTT 协议接收校正数据的情况,例如 u-blox PointPerfect GNSS 增强服务。
PointPerfectGNSS 增强服务
如果使用 NTRIP,则需要访问 NTRIP Caster(地址、端口、用户名和密码)。要使用 Caster,可以使用附近的 GNSS 基站和 RTK2go 等 RTK 通播服务,或者使用商业 GNSS 校正服务。
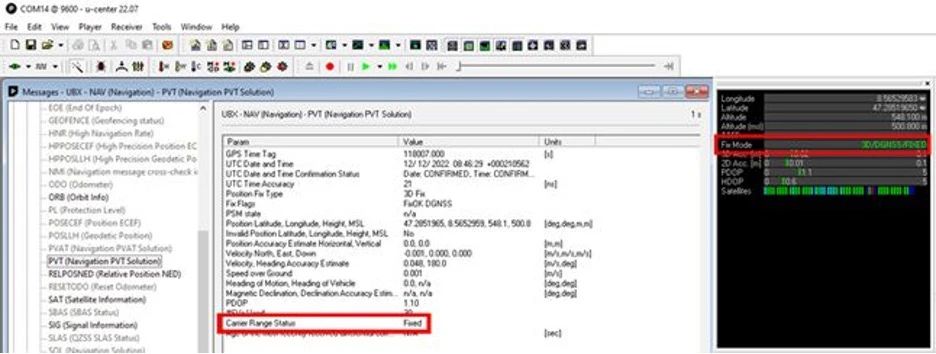
u-center 可让您实时监测 RTK 状态。在开阔天空的条件下,设置良好的系统应在两分钟内确定 RTK 定位。
固定传感器融合设置
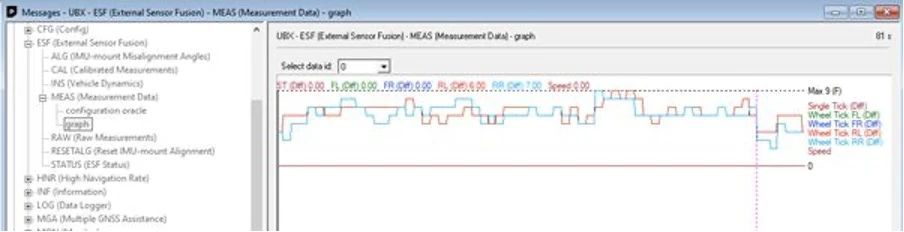
为实现可靠的厘米级定位性能,最后一步(也是最重要的一步)涉及到为传感器融合设置接收机。首先,您需要通过接收机上的专用引脚(仅适用于汽车应用场景)或串行接口,向接收机提供里程测量数据。如果使用串行接口,要确保数据流的质量足够高,具有最低的采样延迟和数据丢失,并且按固定间隔输送。
接下来,选择最合适的动态模型(汽车、机器人割草机或电动滑板车)来配置传感器融合解决方案,并确定接收机相对于车辆的方向。在汽车应用场景中,可考虑使用自动对齐功能,以节省时间和精力。
接下来只需要设置导航输出率,就可以开始校准和测试解决方案(如文末的入门指南中所述)了。
恭喜,大功告成!
衷心希望这篇文章和文末这个更加详细的入门指南能让您相信,安装高精度定位解决方案并不难。
/关于u-blox公司/
瑞士u-blox公司(SIX:UBXN)专注于为客户提供丰富的芯片和模块产品以及全面的物联网服务,赋能客户以实现精准定位与万物互联。我们凭借业界领先的解决方案持续推动未来汽车与物联网行业的创新升级。u-blox公司总部设于瑞士苏黎世塔尔维尔,目前全球员工约1,400名,可为客户量身打造出兼具精准、智能和可持续性的解决方案。
-
接收机
+关注
关注
8文章
1180浏览量
53451 -
定位
+关注
关注
5文章
1329浏览量
35357 -
GNSS
+关注
关注
9文章
767浏览量
47896 -
服务机器人
+关注
关注
9文章
578浏览量
52536
原文标题:实用指南 | 如何实现自主服务机器人的精准定位?
文章出处:【微信号:ublox_China,微信公众号:ublox】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
贸泽电子开售u-blox XPLR-HPG-2探索套件 助力快速开发高精度GNSS应用
基于u-blox高灵敏精确定位系统
u-blox F9平台研发的基带和射频一体化芯片实现室外导航和室内导航无缝链接

u-blox推出工业和汽车应用的F9多功能高精度定位技术

u-blox在极富挑战性的城市环境中提供持续的车道精确定位技术
u-blox发布全新蓝牙高精度室内定位AoA探索套件
u-blox助Facebook新一代授时系统加速数据中心运转






 工商网监
工商网监
评论