 正弦波控制器速度怎么解码
正弦波控制器速度怎么解码
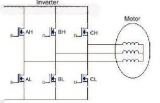
正弦波控制器,也称为正弦波驱动器,是一种用于控制电机速度的电子设备,它通过生成正弦波形的电压或电流来驱动电机。这种控制器通常用于无刷直流电机(BLDC)和永磁同步电机(PMSM),因为它们可以提供高效率和良好的动态响应。
1. 正弦波控制器的基本原理
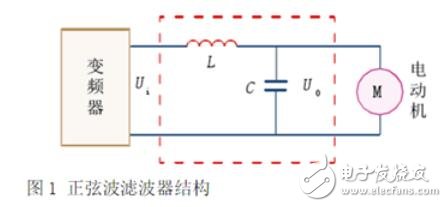
正弦波控制器通过生成三相正弦波电压来驱动电机。这些电压与电机的转子位置同步,以确保电机的转子以恒定的速度旋转。
2. 控制策略
正弦波控制器通常采用矢量控制或直接转矩控制(DTC)策略。这些控制策略通过调节电机的电压和电流来实现对速度的精确控制。
3. 转子位置检测
为了生成与转子位置同步的正弦波电压,控制器需要知道转子的确切位置。这通常通过霍尔传感器、编码器或其他位置传感器来实现。
4. 速度解码方法
4.1 基于编码器的速度解码
编码器是一种常用的位置传感器,它可以提供转子位置和速度信息。编码器输出的脉冲数与转子的旋转角度成正比,因此可以通过计算脉冲数来解码速度。
4.1.1 编码器类型
- 增量式编码器 :提供一系列脉冲,每个脉冲对应一个固定的角度增量。
- 绝对式编码器 :提供唯一的编码,表示转子的确切位置。
4.1.2 速度计算
- 增量式编码器 :速度可以通过测量单位时间内脉冲数的变化来计算。
- 绝对式编码器 :速度可以通过比较连续两个位置编码的差异来计算。
4.1.3 编码器分辨率
编码器的分辨率决定了速度测量的精度。分辨率越高,速度测量越精确。
4.2 基于霍尔传感器的速度解码
霍尔传感器是一种无接触式传感器,可以检测磁场的变化。在电机中,霍尔传感器通常用于检测转子的位置。
4.2.1 霍尔传感器工作原理
霍尔传感器通过检测转子磁场的变化来确定转子的位置。当转子磁场通过霍尔传感器时,传感器会产生一个电压信号。
4.2.2 速度计算
速度可以通过测量霍尔传感器输出信号的频率来计算。信号的频率与转子的旋转速度成正比。
4.3 基于电流和电压测量的速度解码
在某些情况下,可以通过测量电机的电流和电压来间接计算速度。
4.3.1 电流测量
电机的电流与转矩成正比,而转矩与速度的关系可以通过电机的转矩-速度曲线来确定。
4.3.2 电压测量
电机的电压与转子的电磁场有关。通过测量电压,可以估计转子的位置,进而计算速度。
4.3.3 速度计算
速度可以通过结合电流和电压测量值来计算。这通常涉及到复杂的数学模型和算法。
5. 控制器设计
设计正弦波控制器时,需要考虑以下因素:
- 电机参数 :包括电机的额定电压、额定电流、额定速度等。
- 控制策略 :选择合适的控制策略,如矢量控制或直接转矩控制。
- 传感器选择 :根据应用需求选择合适的位置传感器。
- 硬件设计 :包括电源管理、信号处理、驱动电路等。
6. 实际应用
在实际应用中,正弦波控制器的速度解码需要考虑多种因素,如环境温度、电机负载、电源波动等。这些因素都可能影响速度的测量和控制。
7. 故障诊断和维护
为了确保正弦波控制器的稳定运行,需要定期进行故障诊断和维护。这包括检查传感器、检查电源和信号线路、以及检查控制算法的准确性。
8. 结论
正弦波控制器的速度解码是一个复杂的过程,涉及到电机控制理论、传感器技术、信号处理和算法设计等多个领域。通过深入了解这些领域,可以设计出高效、可靠的正弦波控制器,实现对电机速度的精确控制。
-
控制器
+关注
关注
113文章
16562浏览量
180303 -
正弦波
+关注
关注
11文章
649浏览量
55818 -
电子设备
+关注
关注
2文章
2839浏览量
54145 -
驱动电机
+关注
关注
9文章
419浏览量
30886
发布评论请先 登录
相关推荐
正弦波发生电路原理
为什么用在有齿无刷电机的控制器是方波而不是正弦波输出?
为什么用在有齿无刷电机的控制器是方波而不是正弦波输出?






 工商网监
工商网监
评论