 使用激光跟踪仪提升码垛机器人精度
使用激光跟踪仪提升码垛机器人精度
1.背景
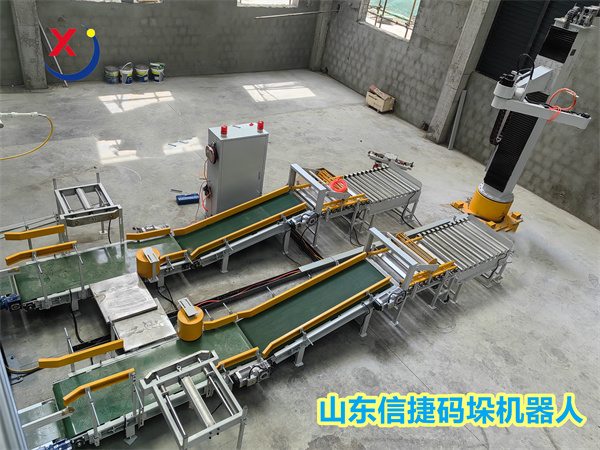
码垛机器人是一种用于工业自动化的机器人,专门设计用来将物品按照一定的顺序和结构堆叠起来,通常用于仓库、物流中心和生产线上,它们可以自动执行重复的、高强度的搬运和堆垛任务。
 图1 码垛机器人
图1 码垛机器人传统调整码垛机器人的方法,通常在组装后先按机械刻度粗调每个关节零位,然后机器人分别沿X/Y方向,走固定长度的距离,用尺子或其它工具测量实际距离,计算偏差,根据偏差再进行微调零位,但这种调整方式有很大的局限性,对机器人的绝对定位精度提升有限,无法满足工业发展需要。
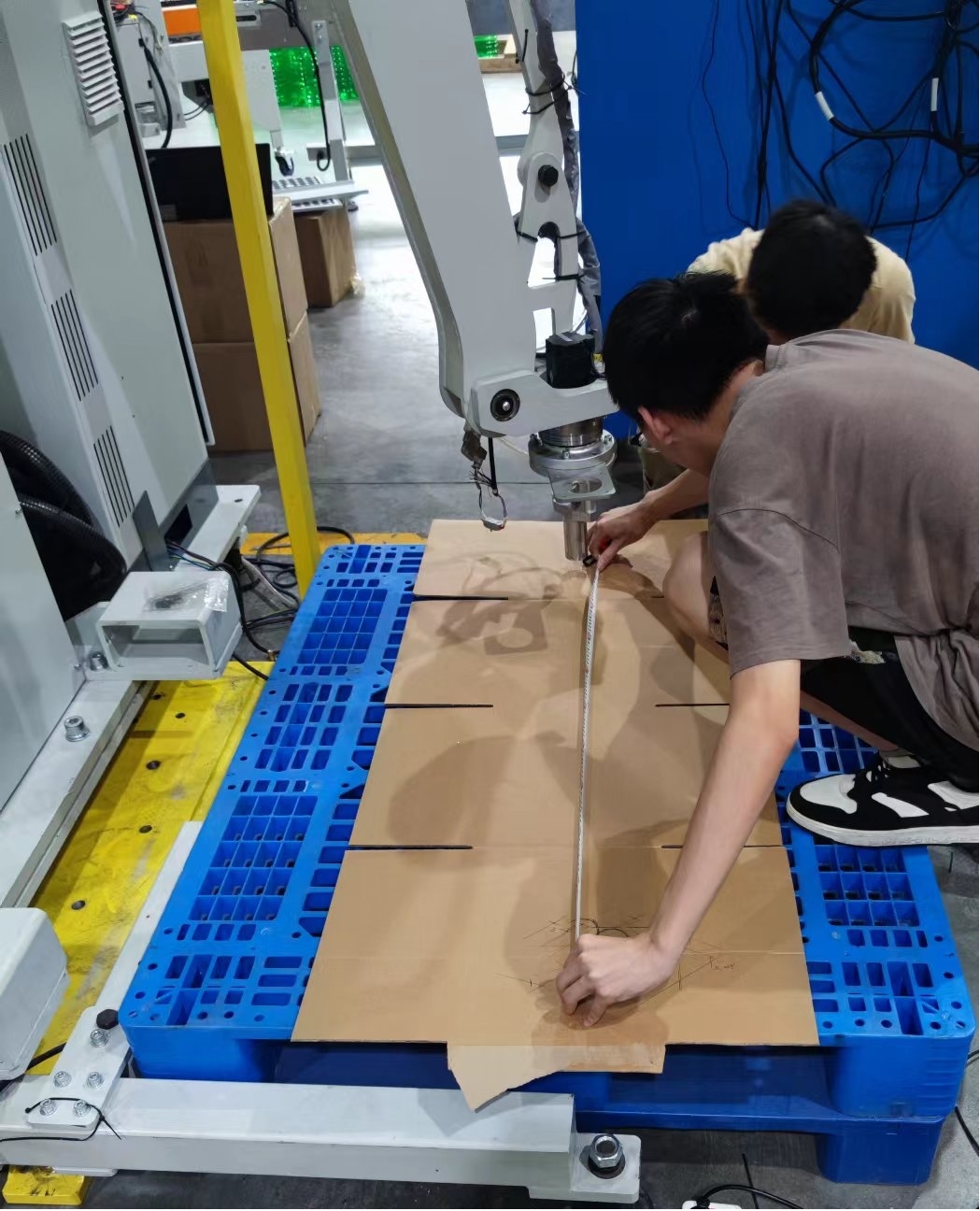 图2 传统方式测量机器人X向运动偏差
图2 传统方式测量机器人X向运动偏差2.解决方案
针对工业机器人行业提升绝对精度的需求,深入行业调研实测,RobotMaster软件系统专门应对工业机器人校准及性能需求,搭配GTS系列激光跟踪仪, 搭建成一套完备的工业机器人校准及检测方案。
其中GTS激光跟踪仪搭配iTracker六维姿态传感器(图3),可实现对目标位置和姿态的动态跟踪及高精度测量,可同时实现对工业机器人位置精度和姿态精度的监控和测量,完美契合工业机器人性能指标的测量需求。
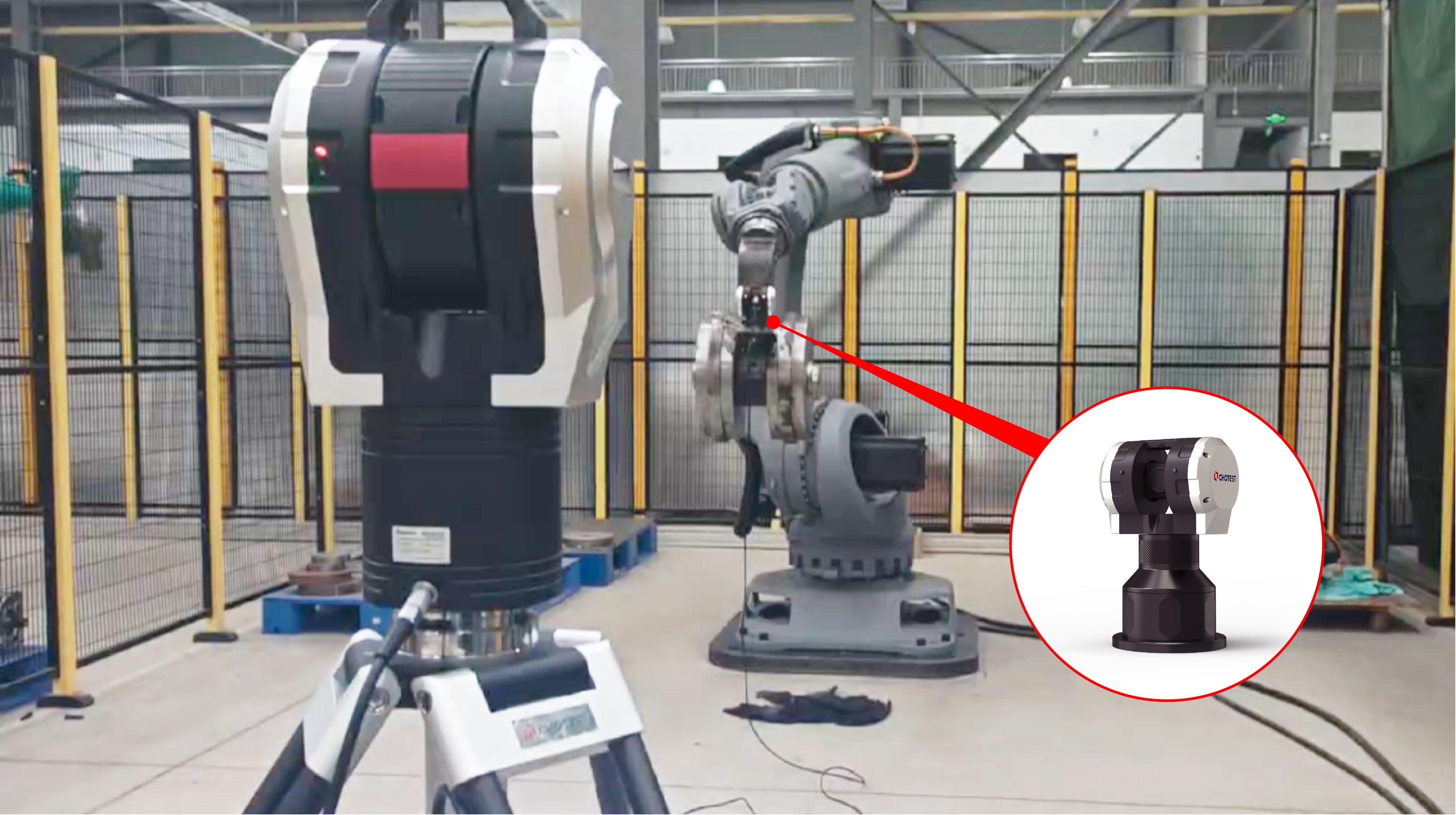 图3 使用六维姿态传感器测量机器人
图3 使用六维姿态传感器测量机器人激光跟踪仪校准机器人的原理:通过GTS激光跟踪仪,可以精确测量机器人末端在一系列预定义关节角度下的实际位姿,RobotMaster软件将测量数据与内部通过DH模型转换得到的理论值进行计算。根据计算所得偏差,通过软件的算法调整DH模型,使得理论位置与测量位置之间的差异最小化,将修正后的参数补偿进机器人,从而提高其精度。
3.校准流程
3.1 模型创建
在RobotMaster软件中选择码垛机器人,建立机器人的理论DH模型(图4),如果没有DH模型,也可用常规模式创建杆长模型。
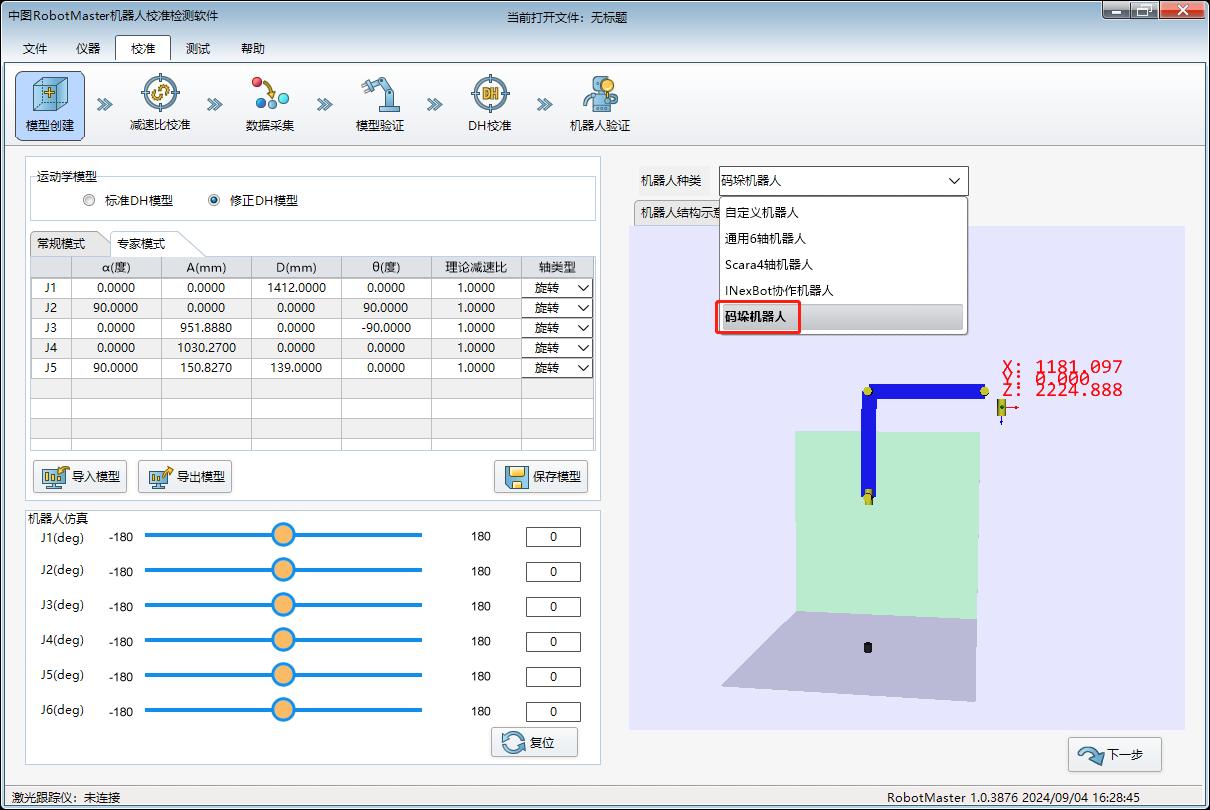 图4 码垛机器人DH模型
图4 码垛机器人DH模型3.2 数据采集
(1)通过跟踪仪采集码垛机器人不同位置的50个点位。
 图5 跟踪仪测量进行数据采集
图5 跟踪仪测量进行数据采集(2)数据采集完毕后,进入模型验证步骤,软件将测量数据与理论值进行计算得到各点位偏差。根据偏差大小可以辅助判断使用的DH模型是否正确,也可以根据实际测量情况,选择去掉个别异常点进行分析校准,如图6,去掉异常点P6后,验证偏差整体下降。
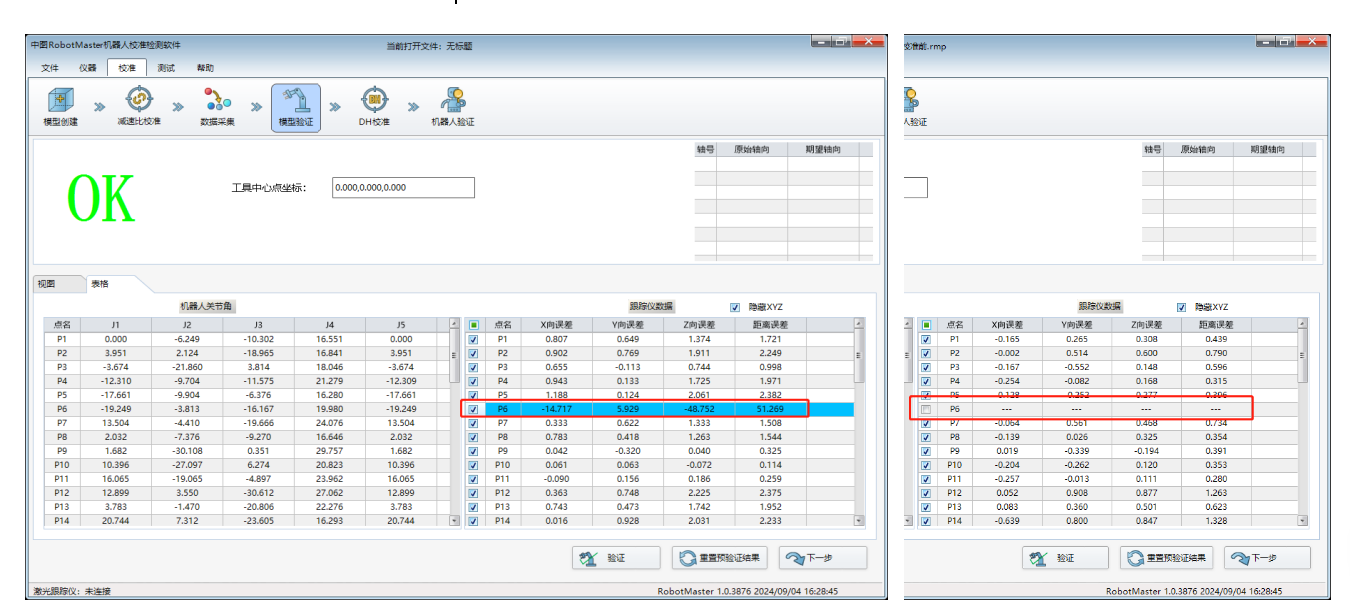 图6 整体计算P6点异常大(左)和去掉P6计算结果正常(右)
图6 整体计算P6点异常大(左)和去掉P6计算结果正常(右)3.3 模型校准
根据需要进行校准项勾选进行校准计算,得到校准后的DH模型(图7左),将补偿值修正到机器人控制器,完成对机器人参数的补偿,可以看到校准后的最大位置精度提升到到0.5mm左右(7右)。
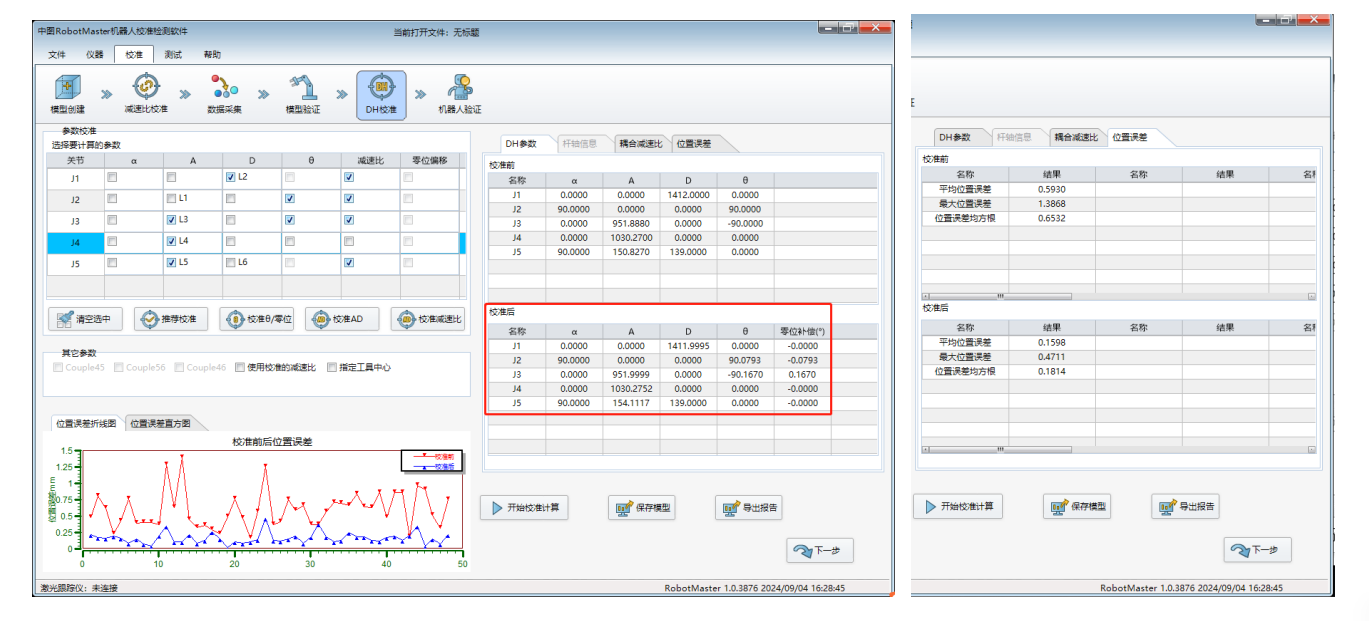 图7 DH模型校准(左)和去掉P6计算结果正常(右)
图7 DH模型校准(左)和去掉P6计算结果正常(右)3.4 校准验证
切换性能检测模块,该模块依据GB/T 12642即ISO 9283标准要求,帮助用户完成对工业机器人各项性能指标的测试。
创建立方体,进行S1-位姿准确度和重复性项测试,从图7可以看出,校准后的码垛机器人位置准确度最大在0.5mm左右,与校准结果相符。
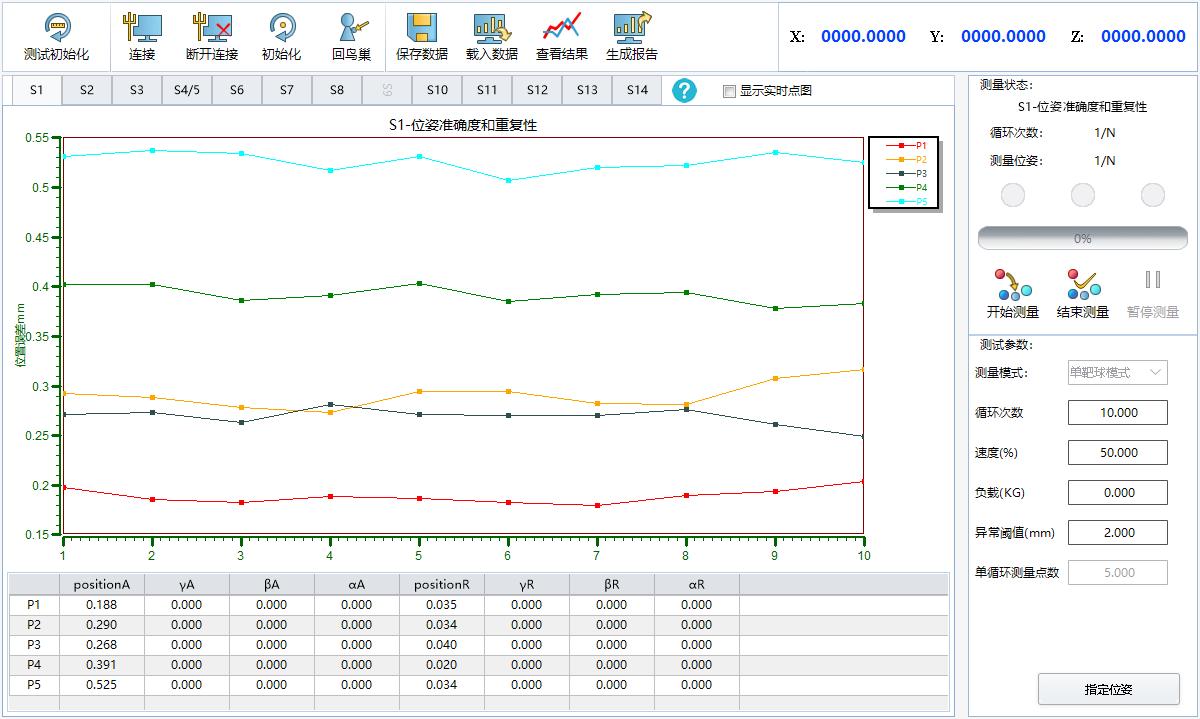 图8 位置准确度与重复性
图8 位置准确度与重复性4.结论
工业机器人校准及性能检测系统,借助RobotMaster软件强大的机器人校准和检测功能,配合GTS激光跟踪仪顶尖的跟踪测量性能,强强组合,已经在工业机器人领域取得了客户充分认可和肯定,未来将用更快的响应和更好的服务支持,满足机器人行业的不同需求,与客户共同提高,确保机器人的性能时刻处于理想状态。
-
机器人
+关注
关注
212文章
28890浏览量
209525 -
工业自动化
+关注
关注
17文章
2535浏览量
67559 -
激光跟踪仪
+关注
关注
0文章
76浏览量
8434
发布评论请先 登录
相关推荐

立柱码垛机器人车间生产效率怎么样



码垛机器人用途

码垛机器人应用行业前景

码垛机器人砂浆搬运码垛优势
码垛机器人的组成和工作原理
激光跟踪仪测出来的是什么?GTS激光跟踪仪全方位测量能力解析

码垛工业机器人的基本原理






 工商网监
工商网监
评论