 机器人减速机结构图及其作用详解
机器人减速机结构图及其作用详解
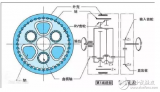
谐波减速器
马达轴连接波发生器,机械手臂连接柔性齿轮圈的硬底座
柔性齿轮圈比刚性齿轮圈少N个齿轮位
波发生器转一圈,柔性齿轮圈移动N个齿轮位
可以达到很高的减速比

RV减速器
RV减速器结构


RV-E是两级减速齿轮,第一级减速是输入齿轮和正齿轮的外啮合,三个正齿轮(spur gear)以120°的间隔对称于输出轴。
第二级减速透过正齿轮驱动偏心轴,带动安装在偏心轴上的RV齿轮,引起两个RV齿轮的偏心运动。两个RV齿轮以180°的相位差带动输出轴,以提供平衡载荷。


RV-C是两级减速齿轮,第一级减速是输入齿轮和第一中心齿轮的外啮合,然后第二中心齿轮与正齿轮的外啮合。三个正齿轮以120°的间隔对称于输出轴。
第二级减速透过正齿轮驱动偏心轴,带动安装在偏心轴上的RV齿轮,引起两个RV齿轮的偏心运动。两个RV齿轮以180°的相位差带动输出轴,以提供平衡载荷。
RV的减速原理

在外壳的内环圈内装有圆柱形的滚针,RV齿轮的偏心运动引起滚针与摆线形RV轮齿的啮合和脱离,产生多组RV轮齿与滚针同时啮合,提高负载能力。 由于RV齿数比滚针少1个数目,因此当偏心轴旋转一周时,如果固定外壳 (case),则RV齿轮与输入轴同向转1个齿的角度。
输出端可以是传动轴(shaft)或外壳(case)。如果外壳固定,则传动轴为输出,输出为同方向。如果传动轴固定,外壳为输出,输出的方向恰好相反。更换固定和输出部件,可以得到不同的传动比。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28751浏览量
208933 -
减速机
+关注
关注
2文章
569浏览量
24294
原文标题:机器人“心脏”减速机机构分析
文章出处:【微信号:GKYXT1508,微信公众号:工控云学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
工业机器人的产业链
工业机器人的产业链分为上游核心零部件,中游本体和传感器等生产,以及下游的系统集成等。核心零部件是减速机、伺服系统、控制系统三部分,分别对应执行系统、驱动系统、控制系统,分别占成本的35%、25
发表于 08-23 15:10
桁架机器人核心配件介绍
分别是DeltaTau的PMAC卡和Beckhoff的TwinCAT系统。2、减速机为什么桁架机器人需要减速器呢桁架机器人通常执行重复的动作,以完成相同的工序;为保证在生产中能够可靠地
发表于 11-22 12:08
为什么工业机器人还需要减速器呢
工业机器人第一关节到第四关节全部使用RV减速机,轻载工业机器人第五关节和第六关节有可能使用谐波减速机。重载工业机器人所有关节都需要使用RV
发表于 09-03 07:10
摆线针轮减速机原理图、结构图、性能及型号表示方法
摆线针轮减速机原理图、结构图、性能及型号表示方法
摆线针轮减速机原理/摆线减速机结构原理行星摆线针轮减
发表于 09-12 17:37
•3.9w次阅读
机器人的关节:盘点那些成名已久的减速机巨擘
作为机器人传动核心部件之一的RV减速机在机器人制造中的成本最高,其重要性不言而喻。精密减速机国产化已经迫在眉睫,是未来机器人发展战略中的大课
发表于 12-27 11:36
•2153次阅读
RV减速机的机械原理对工业机器人的重要性和发展情况
工业机器人所有核心零部件中,减速机最为关键。
当我们在无限憧憬工业机器人时代的时候,你可曾知道,工业机器人最关键的机械结构之一RV
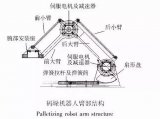
桁架机器人之减速机介绍
技术。桁架机器人的关键基础部件,包括:构成机械手传动系统、控制系统和人机交互系统,对桁架机器人性能起到关键影响作用,并具有通用性和模块化的部件单元。主要分成以下三部分:减速机、交直流伺
发表于 10-23 15:05
•686次阅读
在工业机器人带动下 我国机器人减速机行业有望迎来快速发展
减速机是我国基础装备行业之一,下游应用包括起重运输、水泥建材、重型矿山、航空航用、机器人等。由于下游市场给力,特别是机器人产业蓬勃发展,减速机行业未来发展前景持续向好。
发表于 11-05 10:53
•1155次阅读
如何利用减速器替代电机转速控制机器人运动
从上面的机器人臂部结构图中我们可以看到,在机器人关节处都安装有电机和减速机用来控制关节运动,那么问题来了:在机器人系统中,为什么不能直接控制
工业机器人常见减速机类型有哪些?现状是什么?我国为何发展缓慢
在工业机器人中,减速机三大重要构件之一,成本可占到机器人总成本的三分之一。目前能满足工业机器人减速机要求的只有精密谐波
减速机的原理与结构是什么?
减速机是一种重要的机械装置。如果您对工业机械有任何了解,那么您一定听过这个词。它作为一种传动装置,在很多工业应用中扮演了重要的角色。但对于非专业人士来说,减速机的工作原理及其结构是很难

减速机的结构及其工作原理
的结晶,对人类工业和自动化进程作出了不可磨灭的贡献。变速箱是工业机器人的主要部件,也起着非常重要的作用。减速机的结构及其工作原理?在机械传动





 工商网监
工商网监
评论