 由点及面 抄表机器人跻身于智慧城市的建设之路
由点及面 抄表机器人跻身于智慧城市的建设之路
在如今的物联网时代,由于科技革新和知识更新的速度非常快,人们的工作和生活都产生巨大的变化,从二维码支付到新零售,从网络约车到共享单车,从3D影院到虚拟现实……这些依靠着物联网、大数据、云计算、地理信息集成等新一代的信息技术,促进着城市的交通、公共安全、通信、水务、娱乐、贸易……走向智能化管理的同时,也给人们的生活带来了极大的舒适和便利。
抄表机器人跻身于智慧城市的建设之路
在响应智慧城市建设的大背景下,每个行业都有着不同程度的物联网化升级,以水务行业为例,一直用人工抄表的方式进行居民用水统计和管理,让工作效率不仅低还容易出错的问题长久困扰着这个行业,为此有许多企业都提出了解决方案。
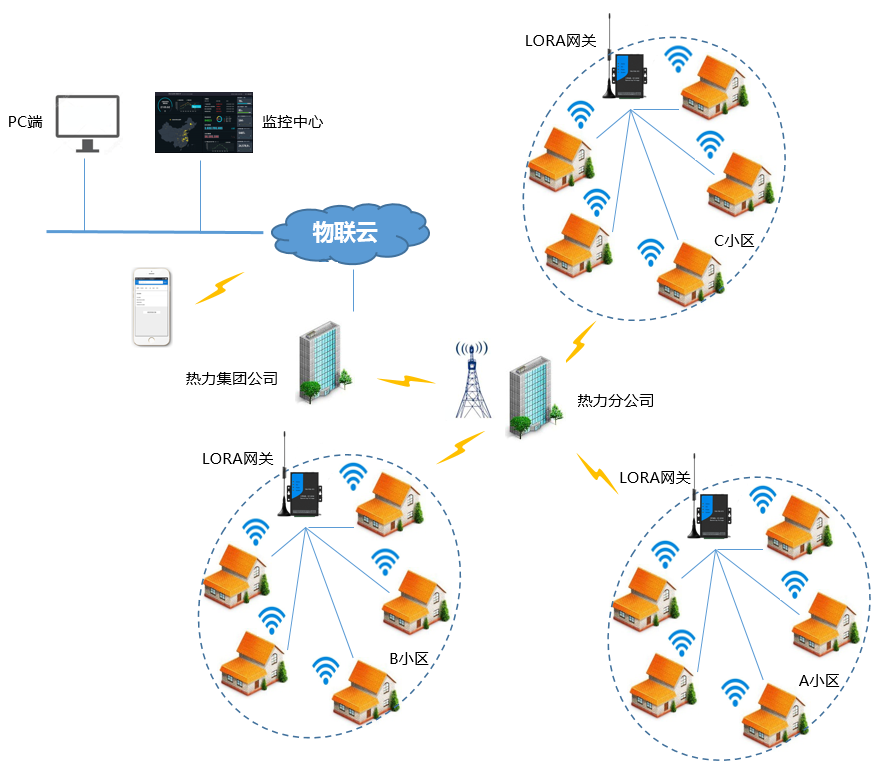
据小编了解国内像国动信息技术、顺舟智能、物道水务科技等企业,就基本上是通过集成的抄表终端模块将水表的数据信息实时传送,不同的是传输信息的技术有的是zigbee有的使用LoRa(NB-IOT),两者都极大程度上的满足了低功耗广域物联网的需求,但目前来说LoRA技术价格较高。
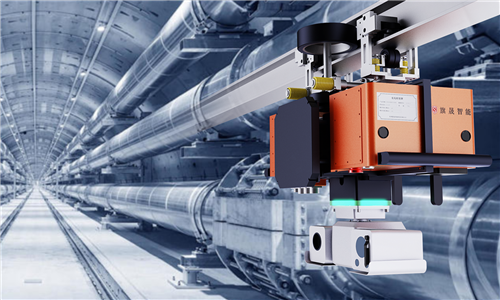
除了传输技术的区别外,物道水务科技与其他二者还有一点有些不同,他们的抄表机器人是运用摄像头拍照技术将水表上的信息记录下来,再通过NB-IoT技术实现水表图片远程低功耗传输,摄像头+NB-IoT技术这样的融合技术是一种最常见的技术创新,可以说是用人工智能中的图片识别来替代人工抄表。
“大家可能刚开始看到会认为这个抄表器人,就是装了个摄像头,技术很简单,但是就算是只有一个小小的摄像头和一些信息传输设备组合的这么一个机器人,它在实际应用中也会产生意想不到的客户价值。”余鸿忠举例说:“除了水厂甚至还有银行找到我们,他们认为这个方案可以用来做信用监控,在贷款的用户或者企业里安装一个,看它的用水量就知道是不是正常生产。”
的确,技术的运用在实际情况下有很多不同发展的方向,这不仅是技术本身所带来的,更多的是在整个智慧城市的构架中不断整合和万物互联后的结果,像二维码支付、共享单车等这些已经被熟知的物联网应用,技术程度算不上十分复杂,但正是因为二者的结合让技术的应用场景逐渐扩增,让人们的出行、消费、交友等生活方式都发生了很大的改变。
智慧城市的第一步,如何集中发力?
“城市是一部十分复杂的机器,而每个人都是这部机器上的零件,被规则约束着高速运转。” 但当作为城市零件的劳动者被机器所取代后,给这个社会的就业情况带来的变动,就不单单是作为抄表的人工被机器所替代,水务行业对于就业人员的技能需求也会有相应提高,甚至还有可能会出现目前社会上还不存在的工种。
更何况,如果当水务行业的相关企业、水厂等都集成在一个物联网平台后,其中所包含的大数据就不单单可以用来作为抄表和信用监控,还可以用在城市的节水管理、长住居民统计、家庭养老保障等等。这样的话,在抄表机器人或其他新技术纳入智慧城市构架中时,除了就业率变化,还会对城市的水务规划和管理中存在的问题产生影响。
但以上提出的问题,在局部试点时是不会有太大的可能,就是说如果抄表机器人的应用只是在部分城市的水厂或者是居民小区里面,那么数据也仅限于小部分的收集,毕竟局部的试点很容易流于形式,只有将单个技术、系统的功能集聚共享,才能形成每个城市高效率、智能化、理流程化的管理模式。
综合目前的智慧城市的建设现状,尽管有不同的运作方式、行业分类、问题导向,但其系统的框架还是具有共性的,从底层的感知到网络连接、云储存到数据分析、实际应用到平台共享,每一层都是不可缺少,在技术创新的支撑下,小到每个人,大到一个企业、一座城市都在不断的更新认知。
智慧城市建设需要做的就是在技术的发展下,将城市的基础建设和制度体系逐渐丰富完善起来,在原有的知识概念里不断重复建设升级,并且在这个过程中解决遇到的各种实际问题。也可以仿照华为、阿里、小米等企业的发展模式,先专注于一点技术(如抄表机器人),在此基础之上扩散延伸,如此循环往复必将给正在建设中的智慧城市产生很大的冲击。
-
机器人
+关注
关注
211文章
28414浏览量
207054 -
物联网
+关注
关注
2909文章
44625浏览量
373235 -
智慧城市
+关注
关注
21文章
4264浏览量
97310
原文标题:能作银行“信监员”的这家抄表机器人有啥不一样
文章出处:【微信号:Iotchannel,微信公众号:联动原素】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
星云智慧获2000万融资,加速机器人系统研发
柔性机器人与刚性机器人区别与联系

Al大模型机器人

abb机器人home点设置方法
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计

中软国际解放号全力打造智慧城市建设项目管理的“长沙模式”
「喜报」迈步机器人荣获机器人应用典型案例奖






 工商网监
工商网监
评论