 视场和角度视场
视场和角度视场

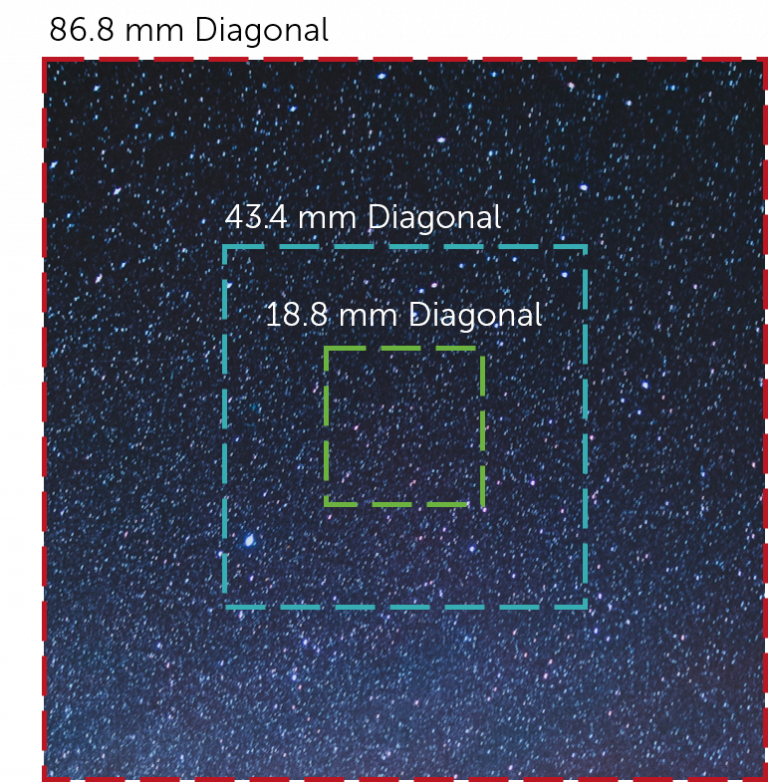
图 1:不同传感器尺寸的比较,显示了更大的传感器尺寸如何有助于更大的视野。蓝色(4096 x 4096 像素)和红色(2048 x 2048 像素)正方形表示由 15 x 15 μm 像素制成的传感器,而绿色正方形(1024 x 1024 像素)表示由 13 x 13 μm 像素制成的传感器。
视场 (FOV) 是相机可以成像的样品的最大区域。它与两件事有关,镜头的焦距和传感器尺寸。图 1 显示了视场和传感器尺寸之间的比较。假设镜头的焦距相同,传感器越大,视野越大。
传感器大小由传感器上的像素数和像素大小决定。不同大小的像素用于不同的应用,较大的像素用于更高的灵敏度,较小的像素用于更高的空间分辨率(了解有关像素大小和相机分辨率的更多信息)。
镜头的焦距描述了镜头与传感器上聚焦图像之间的距离。当光线通过镜头时,它会收敛(正焦距)或发散(负焦距),但在相机中,焦距主要是正焦距。较短的焦距会更强烈地收敛光线(即以更锐利的角度)聚焦被成像的主体。相比之下,较长的焦距对光线的会聚强度较低(即以较浅的角度)以聚焦图像。
这意味着焦距的距离取决于光线与镜头会聚的强度,以便聚焦被成像的主体。这反过来又会影响镜头可以捕捉到的水平光的角度。这被称为角视场 (AFOV),是确定整体 FOV 所必需的。AFOV是在水平方向捕获的任何光与在边缘捕获的任何光之间的角度(如图2所示)。如果您的传感器尺寸是固定的,则更改焦距将改变 AFOV,从而改变整体 FOV。较短的焦距可提供更大的 AFOV 视图,因此 FOV 也越大。对于更长的焦距,情况也是如此,反之亦然,如图 2 所示。

图 2:描述焦距如何影响角视场 (AFOV) 的示意图。焦距越短,AFOV越大,反之亦然,焦距越长。这会影响 FOV 的大小。红线表示来自物体底部的光线,创建图像的顶部;蓝光是从水平方向拍摄的光;灰线表示来自物体顶部的光线,从而创建图像的底部。图像的高度用 h 表示。
计算 AFOV
在计算 AFOV 时,需要做出一些假设:
1、被成像的物体完全填满相机传感器
2、镜头处于无限远焦位(即当图像由无限远的物体形成时)
3、镜头是针孔

图 3:该图显示了如何使用这三个假设来计算角视场 (AFOV)。通过假设镜头是针孔并且处于无限远焦距,并且被成像的物体充满传感器,可以使用一个简单的方程来确定 AFOV(以度为单位)。指视角,因为它是捕获最大物体同时仍将图像贴合在传感器上的角度。
图 3 显示了这些假设如何允许 AFOV 计算的简化版本。通过使用三角函数,AFOV可以表示为:

其中 h 是传感器的水平尺寸,F 是相机镜头的焦距。
测量视场角
为了测量紫外、可见光和红外相机的视场,通常使用光学测试。在测试过程中,光线从黑体(吸收所有落在其上的光的物体)聚焦到焦点处的测试目标上。通过使用一组镜像,可以创建无限远距离的虚拟映像。
这允许在不知道镜头焦距或传感器尺寸的情况下测量 FOV 尺寸(即垂直和水平距离)。然后,创建的图像(包括目标)显示在监视器上,目标图像是完整图像显示的子集。这允许 FOV 近似为:
其中 D 是完整的显示图像尺寸(水平或垂直),d 是目标尺寸(水平或垂直)。
总结
视场定义了相机可以成像的样品的最大面积,由镜头的焦距和传感器尺寸决定。
传感器大小由传感器上的像素大小和像素数决定。这可以针对每种应用进行优化,较大的传感器最适合灵敏度有限的应用,而较小的传感器最适合分辨率有限的应用。
镜头的焦距会聚光线,使物体的图像聚焦到传感器上。这决定了角度视场,即整个视场的参数。这被定义为在水平方向捕获的任何光与在物体边缘捕获的任何光之间的角度。所有这些参数在确定相机的 FOV 方面都起着重要作用,可以使用三角函数和角视场来测量,也可以通过光学测试进行测量,其中使用黑体来创建虚拟图像。
审核编辑 黄宇
-
传感器
+关注
关注
2578文章
55610浏览量
794411 -
相机
+关注
关注
5文章
1608浏览量
56056
发布评论请先 登录
VirtualLab Fusion:基于微软专利的蝴蝶型出瞳扩展光导
[VirtualLab] 带有光波导组件的“HoloLens1”型布局建模
松盛光电推出振镜双视场同轴视觉系统
RTC实时时钟芯片和时钟晶振在本质、功能和角色完全不同

基于DYNA4实现摄像头畸变应用

影响工业镜头视场角的因素

什么是变倍镜头

为什么360°镜头容易“踩坑”?

椭偏仪在DRAM制造量测中的应用:实现20mm×20mm超宽视场下晶圆级精准监控及提升良率

TDK TMR角度传感器的特点与优势
迪米科技红外测温在配电柜的温度监测方案

180°视场角的PMUT传感器:如何助力智能体突破感知边界?




评论