 对机械系统控制实验室开发的机器人安全交互系统进行介绍
对机械系统控制实验室开发的机器人安全交互系统进行介绍
在现代工厂中,工人和机器人是两大主要劳动力。出于安全考虑,这两者通常被限制在金属笼中的机器人分离开来,而这无疑限制了生产力,以及生产线的灵活性。近年来,人们开始将注意力的焦点投向移除笼子的方向上,从而使得人类和机器人可以协力构建一个人机共存的工厂。制造商有意向将人的灵活性和机器人的生产力结合起来从而打造一个柔性生产线(flexible production lines)。工业联合机器人所具有潜力是巨大且广泛的,例如,它们可能被放置在柔性生产线上的人机协作队伍中,其中,机器人手臂和人类工作人员协同处理工件,自动导引运输车(automated guided vehicles ,AGV)与人类工作人员协同合作,以保证工厂物流。在未来的工厂中,预计会有越来越多的人机交互行为发生。与在结构化和确定性环境中工作的传统机器人不同的是,协作型机器人需要在高度非结构化和随机环境中运行。而根本问题在于如何确保协作型机器人在动态不确定的环境中能够高效安全地运行。在这篇文章中,我们将对机械系统控制(MSC)实验室开发的机器人安全交互系统进行介绍。
现有解决方案
针对这一问题,包括Kuka、Fanuc、Nachi、Yaskawa、Adept和ABB在内的机器人制造商正在努力为之提供有效的解决方案。现如今,已经发布了若干个安全的协作机器人或联合机器人,如日本FANUC的Collaborative Robots CR系列、丹麦Universal Robots的UR5、美国Rethink Robotics的Baxter、日本Kawada的NextAge和德国Pi4_RoboticsGmbH的WorkerBot等。然而,这些产品中的大多数都比较注重本质安全性,即在机械设计、致动性和低水平运动控制方面的安全性。而在与人类的接触中的安全性,即作为智能的关键所在(包括感知、认知和高水平运动规划和控制),仍然有待探索。
技术挑战
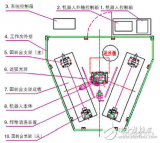
从技术上来说,设计协作型工业机器人的行为是非常具有挑战性的。为了使协作型工业机器人更具有人类友好性,它们应该具备以下能力:收集环境数据并解释这些数据,适应不同的任务和不同的环境,并根据工人的需求量身定做。例如,在下图所示的人机协同组装过程中,机器人应该能够预测,一旦工作人员将两个工件放在一起,他将需要工具来固定组件。那么机器人接下来要做的就应该时拿到工具并将其交给工作人员,同时避免在此过程中与工作人员碰撞。
想要达到这样的行为,面临的挑战在于两个方面:(1)人类行为的复杂性(2)在不以效率为代价的情况下保证实时安全的难度。人类运动的随机特性给系统带来了巨大的不确定性,使其难以保证安全性和效率。
机器人安全交互系统与实时非凸优化(Non-convex Optimization)
机器人安全交互系统(RSIS)是在机械系统控制实验室开发的,它建立了一种方法来设计机器人的行为,进而保障点对点人机交互的安全和效率。
由于机器人需要同长期获得交互行为的人进行交互,因此机器人可以很自然地模拟人类行为。人类的互动行为可能是由于思考或条件反射所致。例如,如果前方发生追尾,后方车辆的司机可能会本能地踩刹车。然而,经过一瞬间的思考,司机可能会加速切入另一条车道,进而避免发生连锁追尾。第一种是短期的安全反应行为,第二种需要计算当前的情况,例如,是否有足够的空间来实现车辆的完全停止,是否有足够的空位来更换车道,以及所更换的车道是否安全。
我们已经引入了一种模拟这些行为的并行规划和控制体系结构,包括长期和短期动作规划器。长期规划器(效率控制器)强调效率,解决了采样率低的长期最优控制问题。短期规划器(安全控制器)基于效率控制器规划的轨迹,通过解决高采样率的短期最优控制问题,进一步解决实时安全问题。这种并行架构也解决了不确定因素,长期规划器根据他人最有可能做出的行为进行规划,短期规划器在短期内考虑他人可能做出的近乎所有行为,以确保安全。
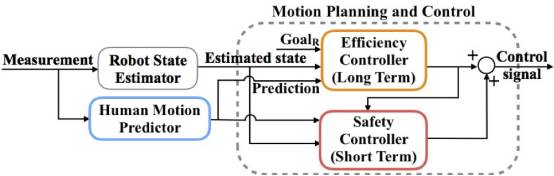
机器人安全交互系统中的并行规划和控制体系结构
然而,集群环境下的机器人动作规划具有高度的非线性和非凸性,因此问题难以被实时解决。为了确保能对环境变化作出及时响应,我们开发了用于实时计算的快速算法,例如,用于长期优化的凸可行集算法(the convex feasible set algorithm,CFS)和用于短期优化的安全集算法(SSA)。这些算法通过对原始非凸问题进行凸化来实现更快的计算,其中,我们假定这些原始非凸问题具有凸目标函数,但受非凸约束。凸可行集算法(CFS)迭代求解可行域凸子集约束下的一系列子问题。解序列将会收敛到一个局部最优。它比一般的非凸优化求解器,如序列二次规划(sequential quadratic programming,SQP)和内点算法(ITP),迭代次数更少,运行速度更快。另一方面,安全集算法(SSA)使用不变集的思想将非凸状态空间约束转化为凸控制空间约束。
在CFS算法中的凸化案例
利用并行规划器和优化算法,机器人可以安全地与环境进行交互,并有效地完成任务。
实时动作规划与控制
迈向通用智能:安全高效的机器人协作系统(SERoCS)
我们现在在机械系统控制实验室中研究RSIS的高级版本,这是一个安全高效的机器人协作系统(SERoCS),它得到了国家科学基金会(NSF)#1734109的支持。除了安全的人机交互(HRI)动作规划和控制算法外,SERoCS还包括用于环境监测的强大认知算法,以及用于人机安全协作的最佳任务规划算法。SERoCS将显著提升联合机器人的技能,并在操作过程中减少或避免人-机、机-机碰撞事故的发生,从而使未来的和谐的人机协作成为可能。
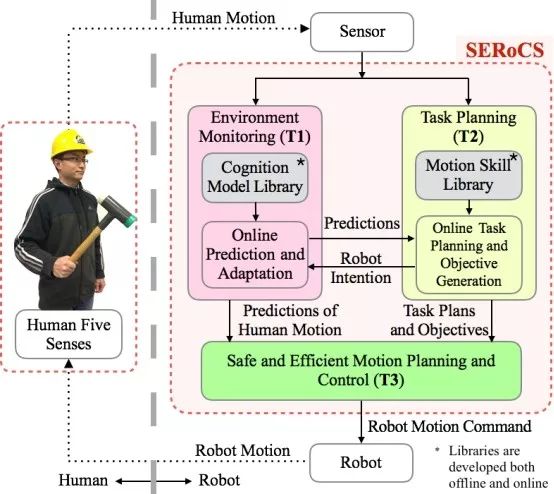
SERoCS架构
参考:
C. Liu, and M. Tomizuka, “Algorithmicsafety measures for intelligent industrial co-robots,” in IEEE InternationalConference on Robotics and Automation (ICRA), 2016.
C. Liu, and M. Tomizuka, “Designing therobot behavior for safe human robot interactions”, in Trends in Control andDecision-Making for Human-Robot Collaboration Systems (Y. Wang and F. Zhang(Eds.)). Springer, 2017.
C. Liu, and M. Tomizuka, “Real timetrajectory optimization for nonlinear robotic systems: Relaxation andconvexification”, in Systems & Control Letters, vol. 108, pp. 56-63, Oct.2017.
C. Liu, C. Lin, and M. Tomizuka, “Theconvex feasible set algorithm for real time optimization in motion planning”,arXiv:1709.00627.
未来智能实验室致力于研究互联网与人工智能未来发展趋势,观察评估人工智能发展水平,由互联网进化论作者,计算机博士刘锋与中国科学院虚拟经济与数据科学研究中心石勇、刘颖教授创建。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
-
机器人
+关注
关注
211文章
28414浏览量
207037 -
机械系统
+关注
关注
0文章
64浏览量
9634
原文标题:伯克利人工智能研究院最新研究:协作型工业机器人如何更智能?
文章出处:【微信号:AItists,微信公众号:人工智能学家】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何系统性地学习工业机器人技术?
智慧实验室教学管理系统平台开发设计案例
浅析伺服电动机机械系统
PDF——工业机器人技术及应用
机电一体化中机械系统部件的选择与设计
机械系统的运动方案设计及机构创新设计
轧辊磨床的机械系统设计
基于DSP和FPGA的四关节实验室机器人控制器的研制







 工商网监
工商网监
评论