 为什么自动驾驶中全球导航卫星系统如此重要?
为什么自动驾驶中全球导航卫星系统如此重要?

全球导航卫星系统(GNSS,Global Navigation Satellite System)作为实现高精度定位的核心技术之一,已经成为自动驾驶技术发展的重要支撑。随着高级辅助驾驶技术的发展,定位识别的重要性不言而喻,高精度卫星定位在城市、乡村、高速等各种场景的驾驶中的应用也愈发广泛。而GNSS凭借其全天候、全球覆盖、定位精度高的优势,成为自动驾驶车辆进行位置识别和路径跟踪的重要技术保障。
GNSS技术概述与核心功能
GNSS由多个卫星导航系统组成,全球广泛应用的美国全球定位系统(GPS)、中国北斗卫星导航系统(BDS)、俄罗斯的GLONASS系统以及欧洲的伽利略(Galileo)系统等均属于GNSS。GNSS的核心功能是通过卫星信号向地面用户提供精确的位置信息和时间数据,这些数据可用于车辆导航、授时和速度测量。
1.1GNSS的工作原理
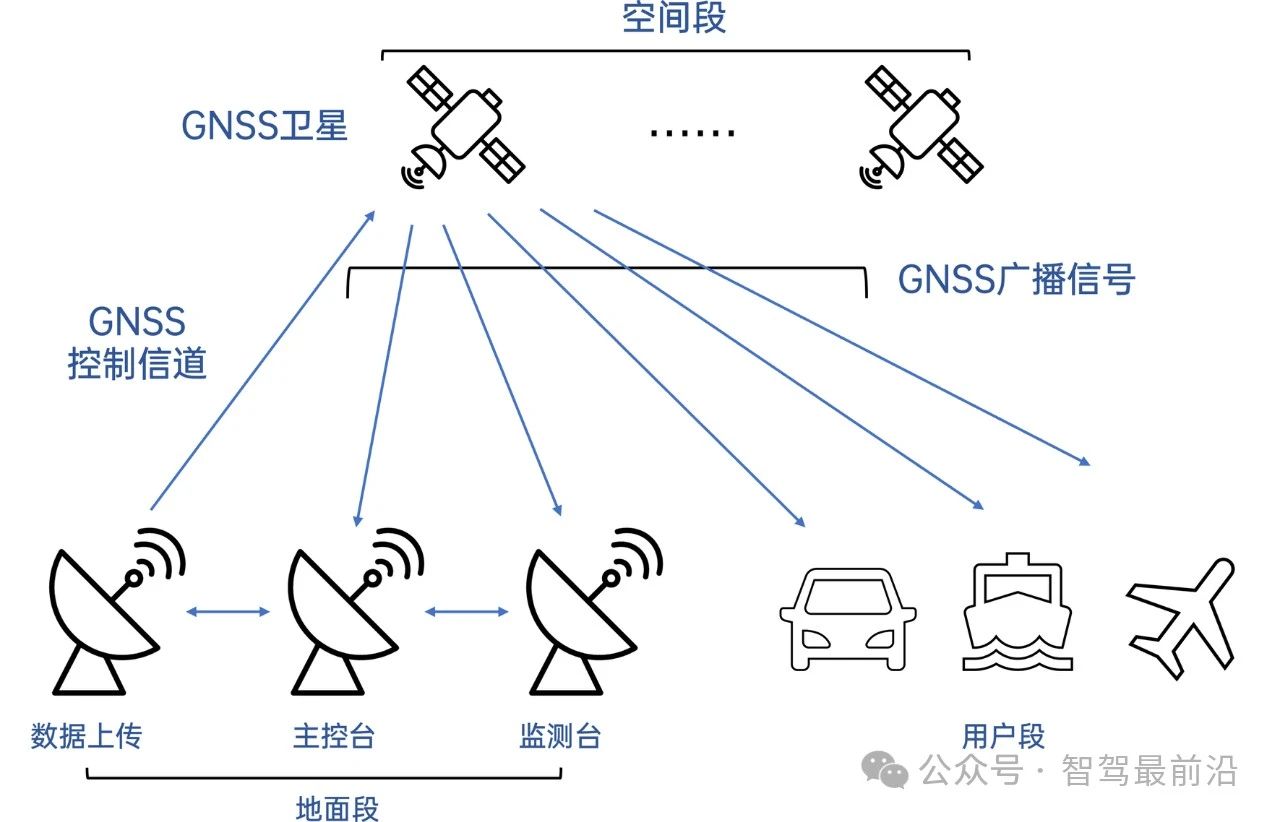
GNSS系统和其他卫星通信一样,可以从结构上大概分成三部分:空间段-地面段-用户段,其中「1」:空间段:在地球上空20,000至37,000公里之间运行的GNSS卫星;这些卫星广播信号,识别正在传输的卫星及其时间、轨道和健康状况。地面段:是一个由位于世界各地的主控、数据上传和监测站组成的控制网络,主要负责这些站接收卫星信号,并将卫星显示的位置与轨道模型显示的位置进行比较并进行修正。而这里的轨道模型与预测数据就被称为星历(ephemeris)用户段:所有可以接收卫星信号并根据至少四颗卫星的时间和轨道位置输出位置的设备都可以称之为用户端,主要包含信号接收天线,可处理该信号并输出位置信息的接收与定位模块。其中有采用基准站与流动站参照提高定位精度的定位模块,也就是RTK。目前,随着自动驾驶与智能物联网等技术的发展,高精度定位发展也越发迅猛,对定位精度与定位效果测试的需求也越来越多。
1.2高精度GNSS增强技术
传统的GNSS系统定位精度在米级范围内,而自动驾驶要求的定位精度需达到亚米级甚至厘米级。在自动驾驶中,RTK(实时动态差分)和PPP(精密单点定位)是两种常用的GNSS增强技术,它们能够通过差分计算和误差校正,将定位精度提升至厘米级别。RTK通过基准站与流动站之间的差分信息计算误差,而PPP则通过精密的卫星轨道和时钟数据校正误差。
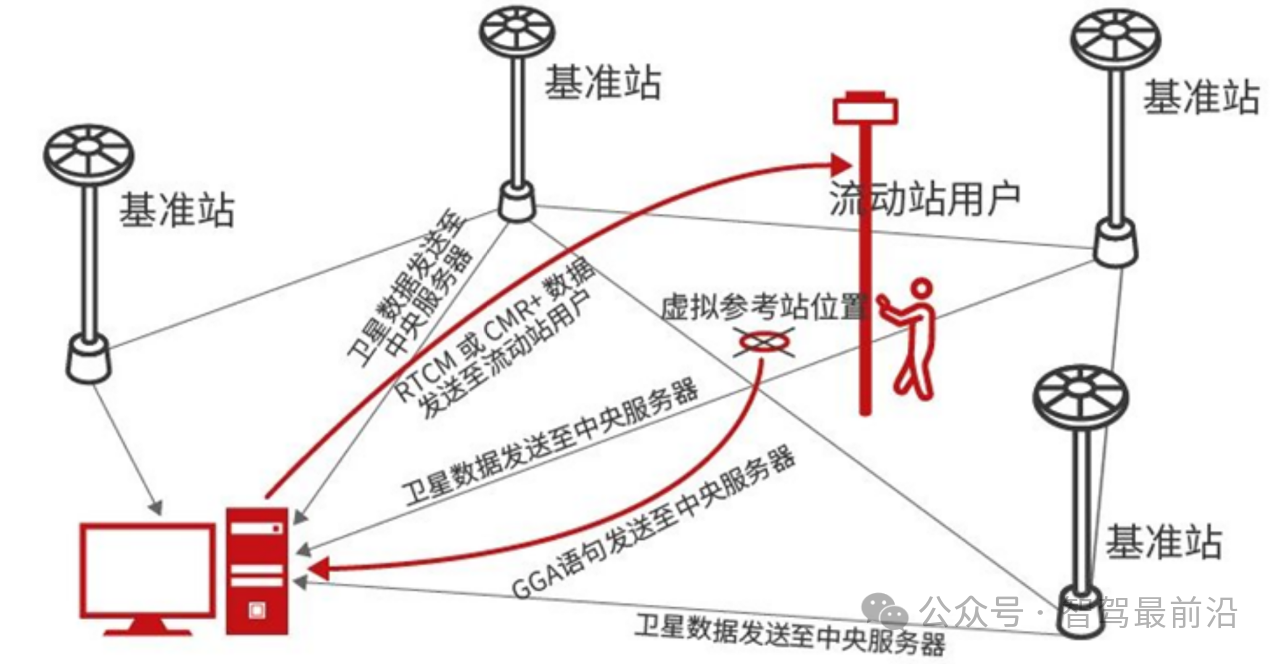
RTK工作原理示意图
GNSS在自动驾驶中的应用
在自动驾驶车辆中,精确的位置信息是实现路径规划、车道保持、避障以及自动泊车等功能的前提。自动驾驶的不同应用场景对于定位精度、信号稳定性和实时性有不同的要求,而GNSS能够满足多种应用场景的需求,并与其他传感器技术协同工作,提升车辆定位的稳定性和安全性。

2.1高速公路场景中的应用
在高速公路场景下,自动驾驶车辆通常以较高速度行驶,GNSS在这种场景中的应用尤为重要。车辆需要实时获取精确的位置、速度和时间数据,以保持车道居中行驶并与其他车辆保持安全距离。通过GNSS与车载传感器如激光雷达、毫米波雷达的融合,自动驾驶系统能够快速响应突发情况,如紧急刹车或超车,确保行驶安全。GNSS的RTK技术能够在开阔的高速公路上提供精确的车辆位置,不受建筑物等障碍物的遮挡影响,实时调整车辆的位置和速度。而PPP技术在大范围内提供高精度定位服务,弥补RTK在基站覆盖不足区域的限制。
2.2城市道路与复杂环境中的应用
在城市道路中,GNSS信号容易受到高楼、树木等障碍物的阻挡,导致多路径效应和信号反射问题,从而影响定位精度。这是自动驾驶中常见的技术挑战之一。为了解决这个问题,自动驾驶系统通常会采用GNSS与其他传感器的融合技术。例如,惯性导航系统(INS)可以与GNSS结合,当GNSS信号丢失时,INS能够依靠陀螺仪和加速度计提供短时间内的相对位置信息,确保自动驾驶系统不会因为短暂的信号丢失而出现决策错误。此外,城市中的自动驾驶车辆需要具备更高的路径规划能力,尤其是在复杂的交叉口、停车场等场景中,车辆必须依赖GNSS提供准确的地理位置和车道级定位能力。随着北斗系统和伽利略系统的逐渐完善,多星座、多频段GNSS技术可以通过更多的卫星信号提供冗余数据,进一步提升定位精度和信号稳定性。
2.3无人驾驶农机与其他垂直应用
自动驾驶不仅在乘用车领域得到广泛应用,在无人驾驶农机、物流车辆等领域也得到了快速发展。例如,在农业自动驾驶中,GNSS能够为无人农机提供厘米级的定位精度,用于实现自动播种、耕作和施肥等任务。通过GNSS与其他地理信息系统(GIS)的结合,农机能够精准地识别地块边界、作业范围和规划路径,实现农业生产的自动化。
GNSS在自动驾驶中的技术挑战
虽然GNSS在自动驾驶中发挥了重要作用,但在实际应用中,仍然面临诸多技术挑战。为了确保车辆能够在复杂的道路环境中安全行驶,GNSS技术需要进一步提升其抗干扰能力、误差校正机制和信号稳定性。
3.1多路径效应和信号遮挡问题
多路径效应是GNSS应用中的主要问题之一,尤其是在城市高楼林立的环境中,信号容易反射并产生误差。多路径效应会导致定位信号的不准确,进而影响自动驾驶车辆的路径规划和控制决策。为了解决这一问题,现代GNSS系统通过使用多频段卫星信号、增强接收器的滤波能力以及结合其他定位传感器(如视觉传感器、惯性导航)等方式,提高系统的抗干扰能力。信号遮挡问题在城市和隧道等环境中同样显著。当车辆进入卫星信号受限区域时,GNSS信号的可用性下降,导致定位数据不可用。为应对这一问题,车辆的定位系统必须具备数据冗余能力,能够通过其他传感器如IMU(惯性测量单元)、V2X(车对车及车对基础设施通信)等提供备份方案,以避免系统在信号中断期间出现重大错误。
3.2电离层和对流层误差的影响
GNSS信号在传输过程中,会经过电离层和对流层,这些大气层中的物质会对卫星信号的传播速度产生影响,进而导致信号到达接收器的时间出现偏差,形成定位误差。这种误差在普通的导航应用中影响不大,但对于要求厘米级精度的自动驾驶而言,必须进行有效的误差校正。电离层误差在高精度GNSS应用中尤为关键。为了消除这一误差,GNSS系统采用了双频定位技术,通过同时接收不同频率的卫星信号,解算出电离层对信号的延迟影响,并对其进行修正。此外,地基增强系统(GBAS)和星基增强系统(SBAS)等服务,也通过实时传输精确的电离层数据,为自动驾驶车辆提供可靠的误差校正信息。
3.3定位初始化时间与精度问题
在高精度GNSS定位中,RTK和PPP技术都面临一个共同的问题,即定位初始化时间较长。特别是PPP技术,通常需要十几分钟的初始化时间才能获得高精度的定位结果,这在自动驾驶中的实时应用具有一定的局限性。为了解决这个问题,PPP-RTK技术应运而生,它结合了RTK和PPP的优点,能够在较短时间内实现厘米级精度的定位,并且在基站覆盖不足的情况下依然能够保持较高的定位精度。随着卫星星座的增加和多频段技术的完善,PPP-RTK将成为自动驾驶高精度定位的未来发展方向。
GNSS未来发展方向
随着5G通信网络的逐步普及以及低轨道卫星技术的快速发展,GNSS的应用前景更加广阔。未来的GNSS技术将与其他先进技术深度融合,进一步提升自动驾驶车辆的定位精度和安全性。
4.1GNSS与V2X技术的融合
V2X技术是自动驾驶发展的重要支撑,它能够实现车辆之间、车辆与基础设施之间的实时通信。通过V2X,车辆可以共享位置信息、速度信息以及交通信号等数据,从而实现更高效的路径规划和更安全的驾驶决策。GNSS为V2X提供了基础的位置信息,确保车辆在动态交通环境中能够实时获取准确的位置和速度信息,并通过V2X与其他车辆协调合作。未来,随着V2X技术的普及,GNSS与V2X的结合将大幅提升自动驾驶系统的整体性能,确保自动驾驶车辆在复杂的交通网络中实现协同驾驶和集群管理。
4.2低轨道卫星与GNSS结合的前景
传统的GNSS系统以中高轨道卫星为主,虽然能够提供全球覆盖的定位服务,但在信号延迟和精度上仍存在一定的局限性。随着低轨道卫星技术的发展,未来的GNSS系统将引入低轨道卫星,进一步提升定位精度、减少信号延迟。低轨道卫星的优势在于其距离地面更近,信号传播时间更短,能够提供更高的更新频率和更低的延迟。此外,低轨道卫星还可以弥补现有GNSS系统在偏远地区和城市高密度区域中的信号覆盖不足,提供更稳定的定位服务。低轨道卫星与现有GNSS的融合,将为自动驾驶提供更强大的技术支撑,尤其在自动驾驶等级提升到L4、L5时,对高精度、实时性要求极高的场景中。
结论
高精度GNSS是自动驾驶技术中的重要组成部分,它为自动驾驶车辆提供了实时、可靠的位置信息,确保车辆能够在复杂的道路环境中安全行驶。随着自动驾驶技术的发展,GNSS的定位精度、覆盖范围和抗干扰能力都在不断提升。未来,GNSS将与其他先进技术如V2X、低轨道卫星、5G网络等深度融合,进一步推动自动驾驶技术的普及与应用。在这个过程中,GNSS将成为自动驾驶系统中不可或缺的技术基石,为实现更加安全、智能、高效的交通系统提供支持。
参考
「1」https://blog.csdn.net/hongke_weixin/article/details/130052430
审核编辑 黄宇
-
卫星系统
+关注
关注
0文章
82浏览量
17987 -
GNSS
+关注
关注
9文章
1012浏览量
51386 -
自动驾驶
+关注
关注
794文章
14987浏览量
181471
发布评论请先 登录
自动驾驶真的会来吗?
意法半导体推出世界首个定位精度达到自动驾驶级别且符合汽车安全标准的多频GNSS接收器
UWB主动定位系统在自动驾驶中的应用实践
如何让自动驾驶更加安全?
自动驾驶的出现让GPS变得危险
中国第二代导航卫星系统发展到了什么程度?
传感器融合方案改进智能车辆的定位系统
UWB高精度定位在自动驾驶中的应用前景
全球导航卫星系统进展及对导航定位的改善
ADI与北云科技合作推出高精度组合导航板卡,加速自动驾驶系统的商业化进程
上海计量院开发全球导航卫星系统的算法,应用于农机自动驾驶领域
自动驾驶汽车整体架构

高精自动驾驶中的地图匹配定位技术



评论