 VL53L1CB TOF开发(1)----驱动TOF进行测距
VL53L1CB TOF开发(1)----驱动TOF进行测距
概述
TOF(飞行时间)传感器是一种利用光的飞行时间原理来测量物体与传感器之间距离的技术。VL53L1 是一款高精度的TOF传感器,能够在不同环境光条件下,提供多目标检测和多区域扫描功能。通过驱动VL53L1传感器,可以实现对物体的快速、准确测距,最高测量距离可达800厘米。该传感器支持I2C接口,具备多种预设模式(如测距模式、多区域扫描模式、轻量测距模式和自主模式),适用于自动对焦、3D深度测量、存在检测等多种应用场景。
本文将介绍如何通过I2C接口驱动VL53L1传感器进行测距操作,涵盖传感器的初始化、模式配置、测距数据读取等步骤,并提供相应的代码示例,以帮助开发者快速集成和应用该传感器进行测距任务。
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
视频教学
[https://www.bilibili.com/video/BV16LnZe6Eyg/]
样品申请
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源码下载
[https://download.csdn.net/download/qq_24312945/89703991]
主要特点
● 高精度的长距离测量:
○ 该传感器能够进行高精度的长距离测量,最大测距范围可达800厘米。它适用于各种需要长距离测量的应用场景。
● 多区域和多目标检测:
○ 支持多区域扫描和多目标检测功能。用户可以通过软件定义区域大小(如2x2、3x3、4x4或自定义区域),并在每个区域内同时检测多个目标。
● 低功耗:
○ 内置低功耗微控制器,能够在不同的工作模式下保持较低的功耗,适合电池供电的便携式设备。
● 抗干扰能力:
○ 具有对覆盖玻璃的抗干扰能力,并且采用了专利算法,能够在长距离测量时减少由于覆盖玻璃或指纹污渍导致的测量误差。
● 易于集成:
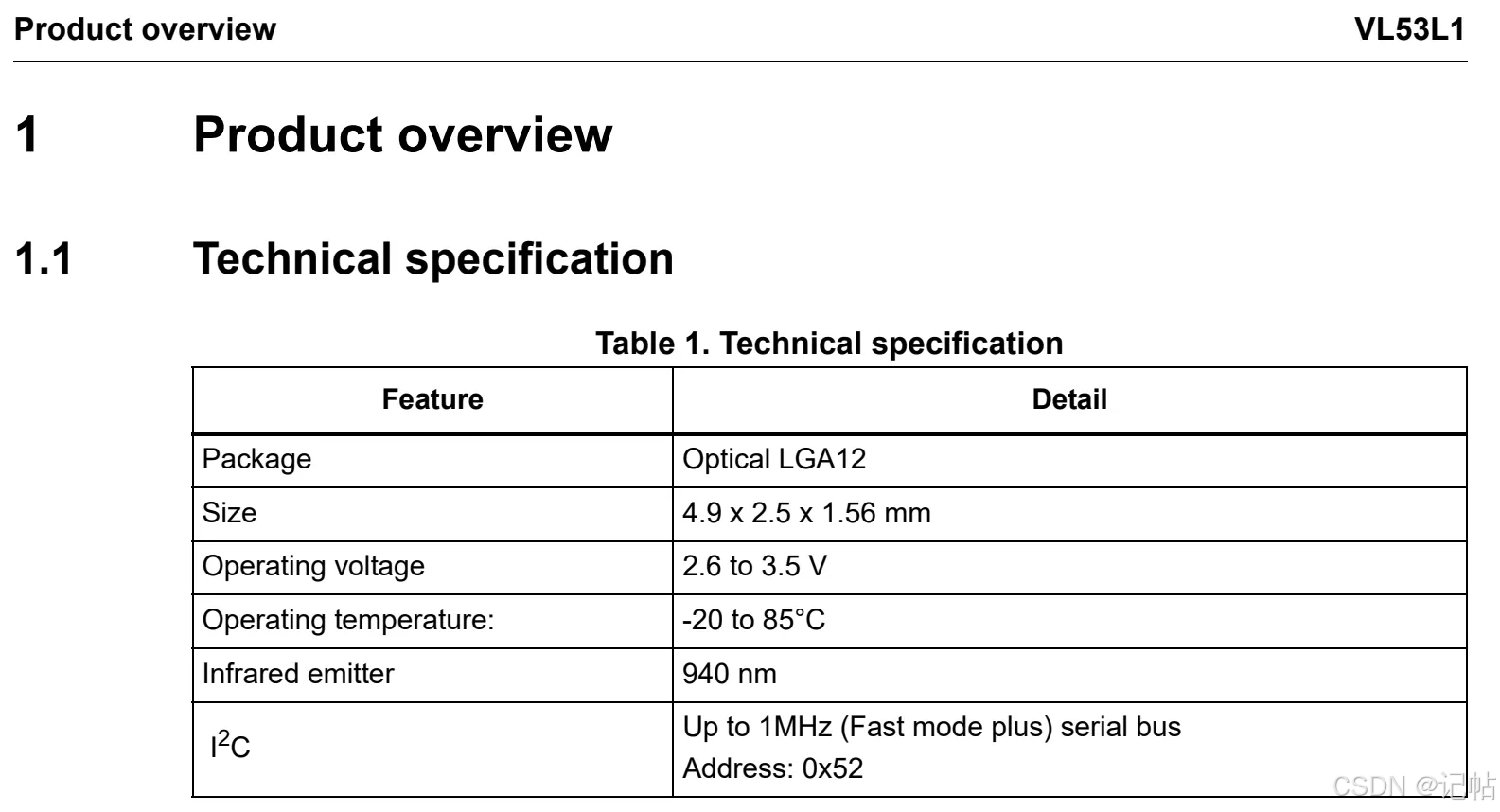
○ 模块体积小(4.9 x 2.5 x 1.56 mm),易于集成到各种设备中。支持I²C接口,最高速率可达1MHz,提供完整的软件驱动,支持Linux和Android系统。
○ 引脚排列兼容VL53L0X、VL53L1X、VL53L1CB、VL53L3CX和VL53L4CX
● 多种预设模式:
○ 提供四种预设操作模式,包括测距模式、多区域扫描模式、轻量测距模式和自主模式,用户可以根据具体应用需求选择合适的模式。
● 安全性:
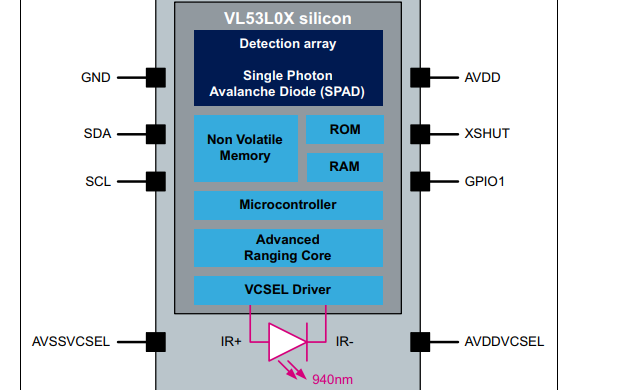
○ 采用940nm的不可见激光发射器(VCSEL),符合Class 1激光安全标准,在各种应用场景中都能安全使用 。

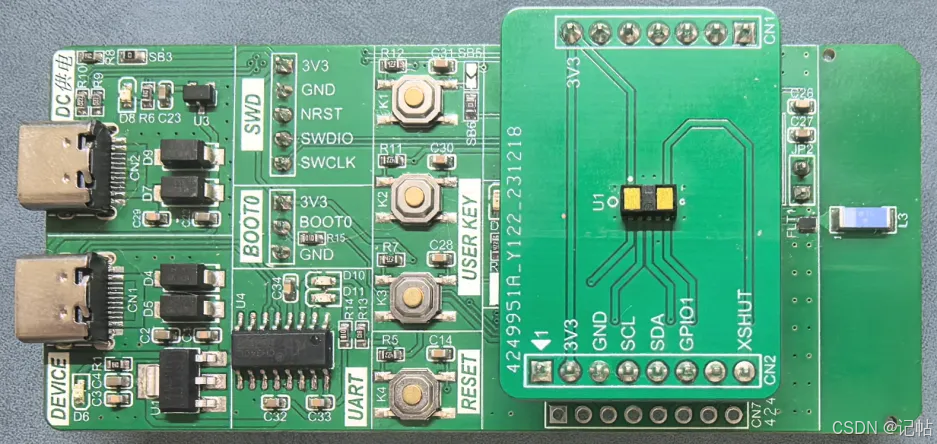
硬件准备
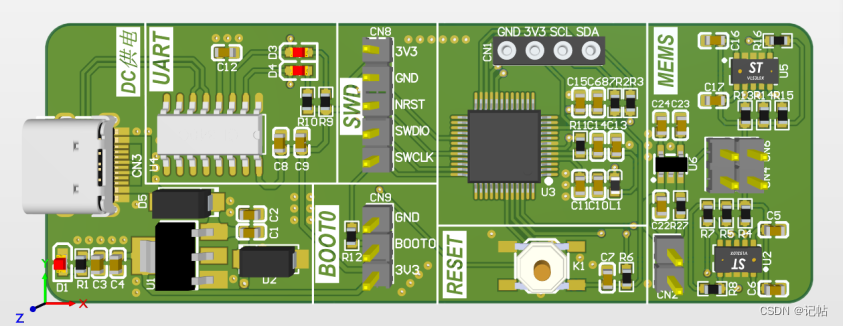
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。
主控为STM32H503CB,TOF为VL53L1。

技术规格
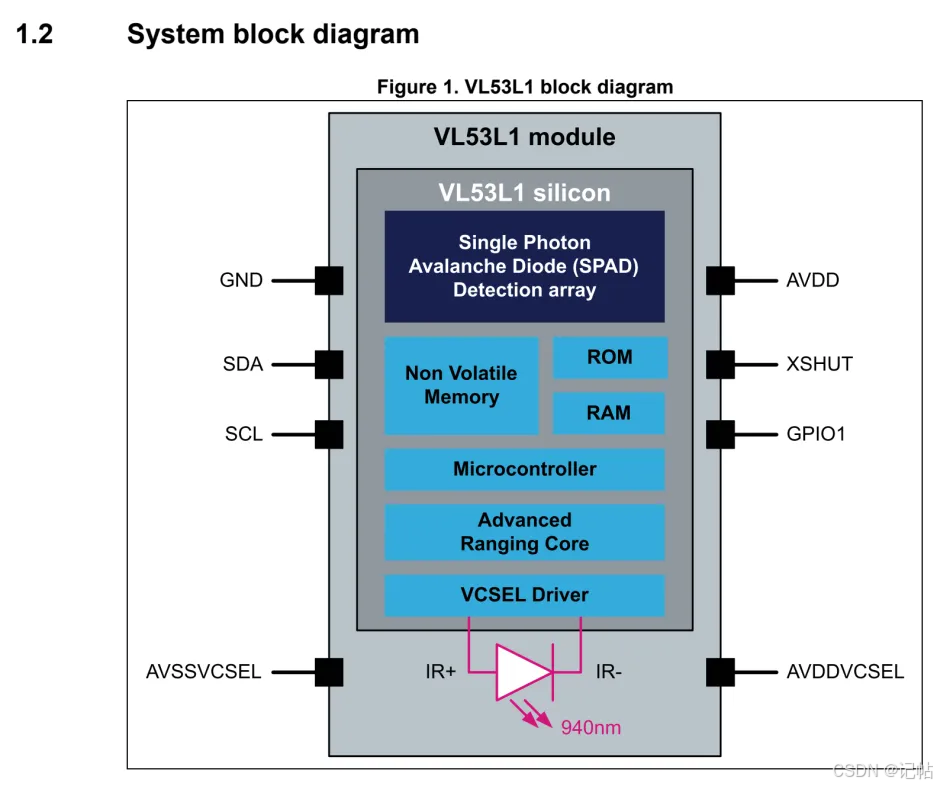
系统框图
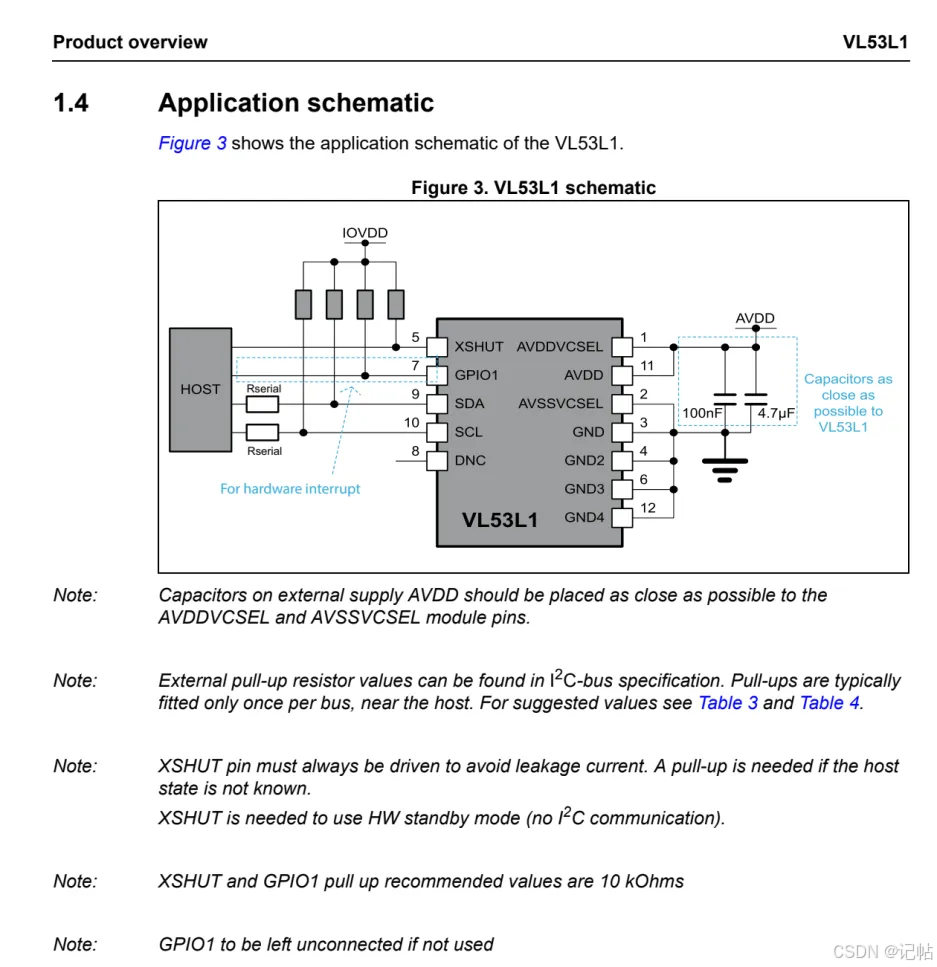
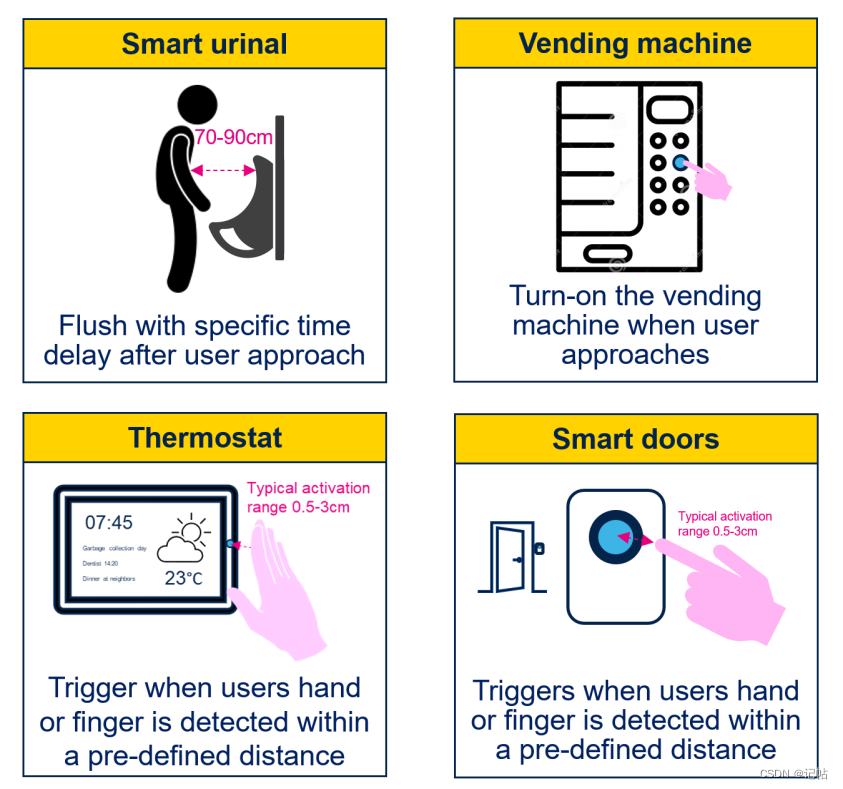
应用示意图
生成STM32CUBEMX
用STM32CUBEMX生成例程,这里使用MCU为STM32H503CB。
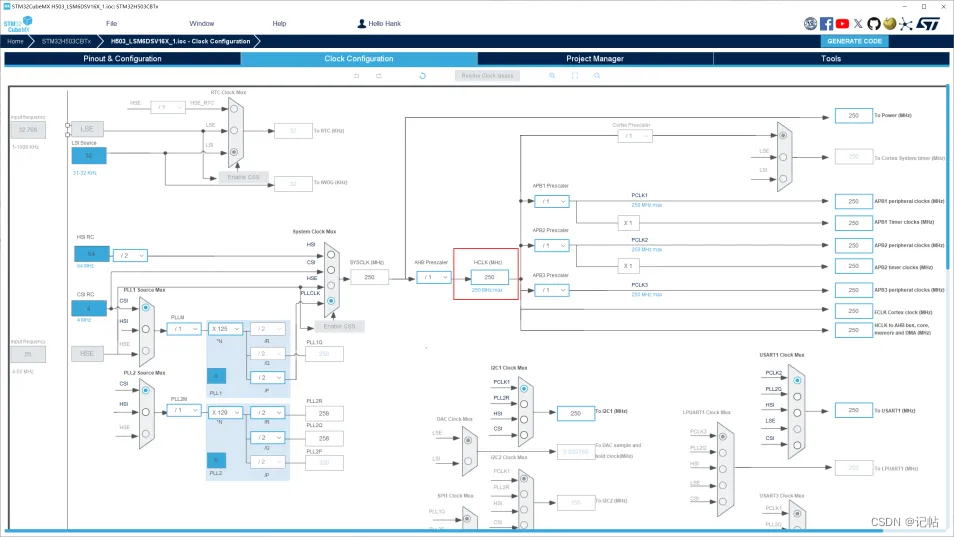
配置时钟树,配置时钟为250M。
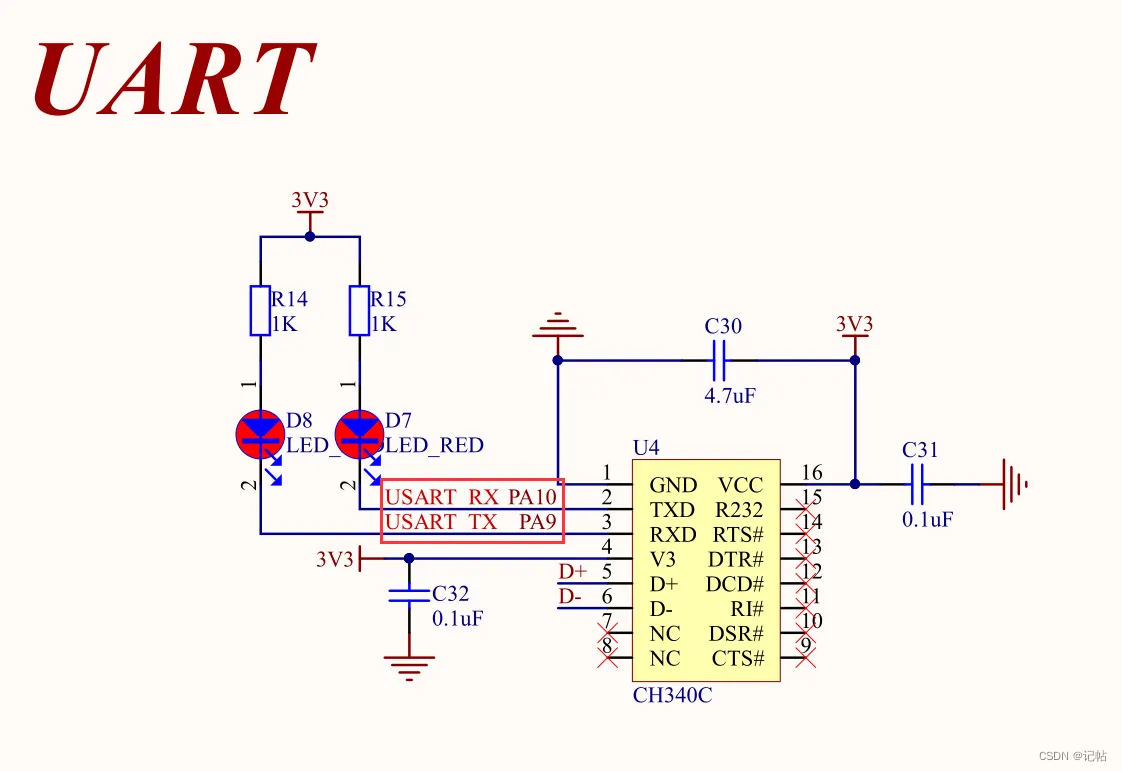
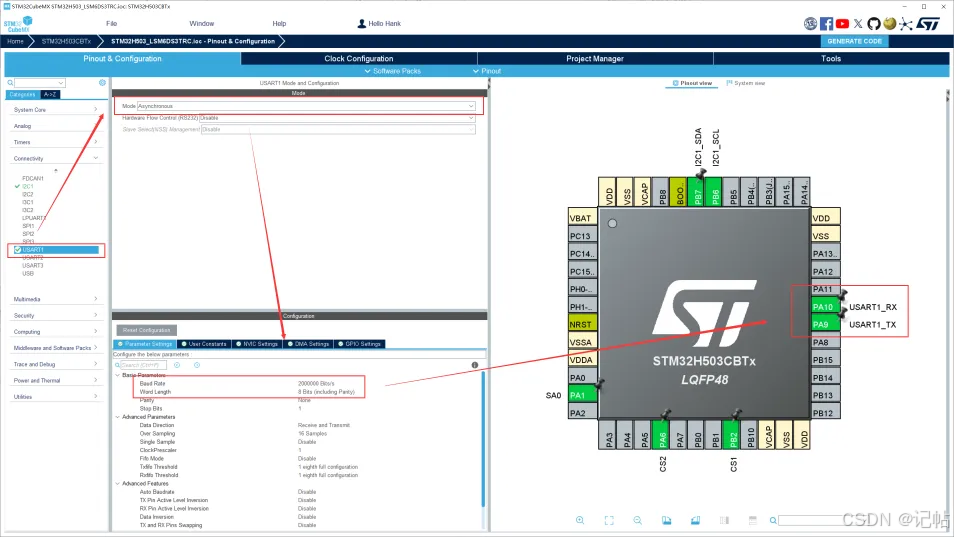
串口配置
查看原理图,PA9和PA10设置为开发板的串口。
配置串口,速率为2000000。
IIC配置
在这个应用中,VL53L1模块通过I2C(IIC)接口与主控器通信。具体来说,VL53L1模块的I2C引脚连接到主控器的PA8和PB5两个IO口。

配置IIC为快速模式,速度为400k。

XSHUT
XSHUT引脚是由主机连接和控制的,这种设计优化了功耗,因为设备在不使用时可以被完全关闭,然后通过主机使用XSHUT引脚来唤醒。当AVDD存在且XSHUT为低电平时,设备处于硬件待机模式(HW Standby mode)。如果XSHUT引脚不由主机控制,而是通过上拉电阻连接到AVDD,那么设备在固件启动(FW BOOT)后会自动进入软件待机(SW STANDBY),而不会进入硬件待机。


GPIO1
在VL53L1X传感器中,GPIO1(通用输入输出引脚1)通常用于中断信号输出。

配置如下所示。

X-CUBE-TOF1
本节介绍在不需要使用样例应用时如何使用STM32CubeMX将X-CUBE-TOF1软件包添加到项目中。有了这样的设置,就只配置了驱动层。

堆栈设置

若无法正常运行需要修改优化等级。

演示结果


审核编辑 黄宇
-
驱动
+关注
关注
12文章
1838浏览量
85261 -
测距
+关注
关注
2文章
105浏览量
19636 -
TOF
+关注
关注
9文章
482浏览量
36331 -
stm32cubemx
+关注
关注
5文章
283浏览量
14791
发布评论请先 登录
相关推荐
基于STM32CUBEMX驱动TOF模块VL53l0x(1)----单模块距离获取的最佳实践
VL53L5CX驱动开发(1)----驱动TOF进行区域检测
VL53L4CD TOF开发(1)----驱动TOF进行测距
VL53L8CX TOF开发(1)----驱动TOF进行区域检测
VL53L1CB TOF开发(2)----多区域扫描模式
新一代ToF 激光测距模块VL53L0X
VL53L1X简介
RT-Thread VL53L0X TOF传感器驱动设计资料实现
我可以使用API VL53LX去支持VL53L1CB吗?
如何区分VL53L1CB和VL53L1CX?
VL53L0X TOF激光测距传感器的数据手册免费下载
微雪电子VL53L1X测距传感器4米VL53L1X测距模块简介
dfrobotVL53L0X ToF激光测距传感器简介
VL53L4CX TOF开发(1)----驱动TOF进行测距
VL53L4CD液位监测(1)----驱动TOF进行测距





 工商网监
工商网监
评论