 智驾仿真测试实战之自动泊车HiL仿真测试
智驾仿真测试实战之自动泊车HiL仿真测试

作者 | 了屋哦骆
小编 | 不吃猪头肉
 引言
引言
汽车进入智能化时代,自动泊车功能已成为标配。在研发测试阶段,实车测试面临测试场景覆盖度不足、效率低下和成本高昂等挑战。为解决这些问题,本文提出一种自动泊车HiL仿真测试系统方案,可大幅度提升测试效率及测试场景覆盖度、缩短测试周期、加速产品迭代升级。

自动泊车系统简介
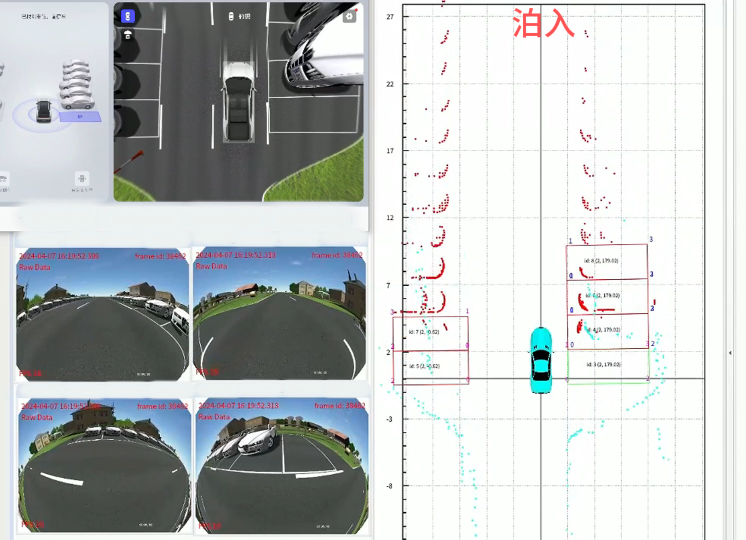
多传感器融合的自动泊车技术结合了超声波雷达和摄像头来实现车位探测和环境感知。超声波雷达通过实时探测周围障碍物的距离,结合车辆自身的长宽,判断是否存在可泊入的空间车位,而摄像头则通过实时图像识别来检测划线车位及其周围环境。传感器的协同工作使自动泊车系统能够精确识别车位、实现精准停车,并确保停车过程中的安全性。

自动泊车HiL仿真测试系统
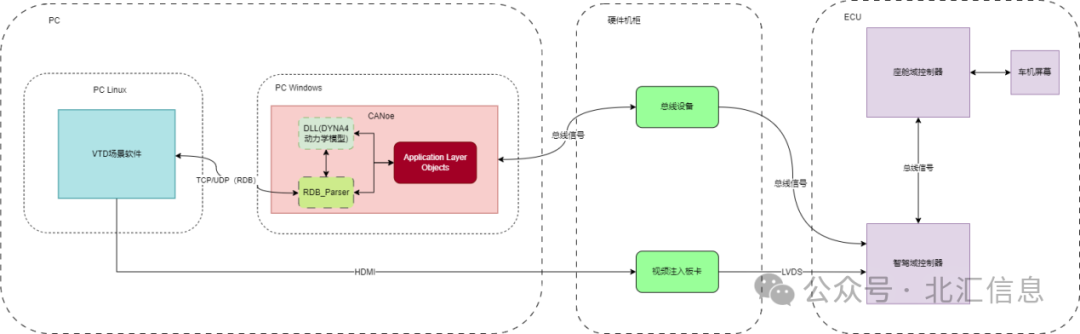
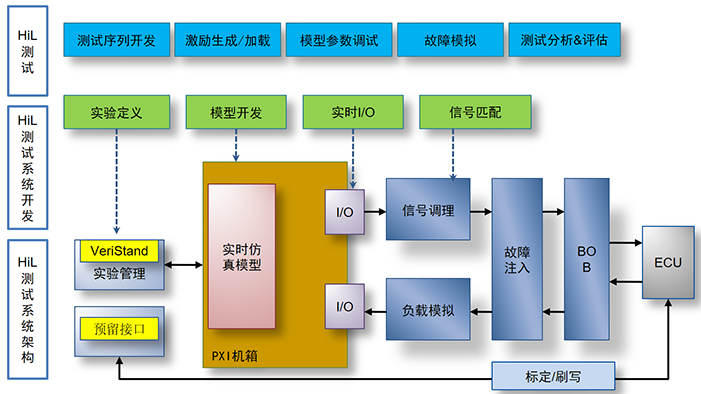
图2 自动泊车 HiL测试系统框图
自动泊车HiL仿真测试系统框架如上图2所示,结合场景仿真软件(VTD)、动力学仿真软件(DYNA4)、实验管理软件(CANoe)和HiL硬件平台,进行整车通信网络仿真、4路环视摄像头仿真和12路超声波雷达仿真,实现自动泊车功能的闭环测试。
3.1整车通信网络仿真
使用CANoe对智驾域控制器交互系统进行虚拟节点仿真,如转向系统、制动系统、组合惯导INS、驾驶员操作指令等。
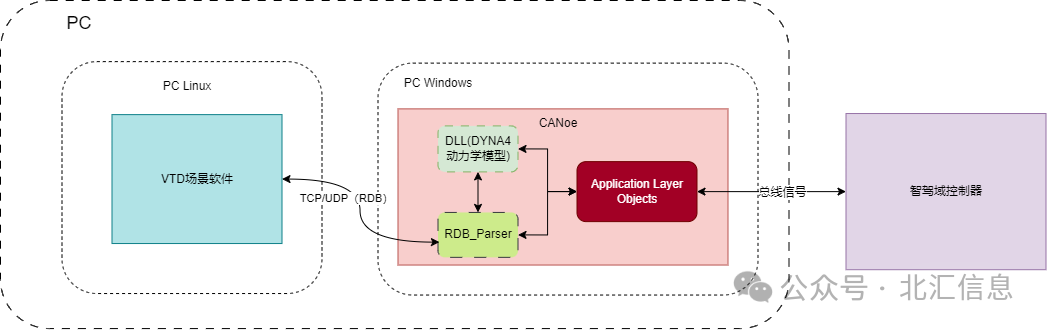
图3 整车通信网络数据流程图
转向、制动系统等车辆实时运动状态信号:DYNA4模型输出轮速、车速、方向盘转角、档位信号等,CANoe做逻辑处理后与总线信号(如CAN FD、SOME/IP、DDS)映射;同时CANoe解析并处理智驾控制器发出的总线信号(如CAN FD、SOME/IP、DDS),映射到DYNA4模型实现车辆运动控制;
组合惯导INS:VTD输出UTM坐标,CANoe中进行加偏处理,即UTM坐标系->WGS84坐标系->GCJ02坐标系后映射到总线信号(如CAN FD、SOME/IP、DDS);
驾驶员车机操作信号:如选择车位、泊出方向选择等。
3.2环视摄像头仿真
针对4路环视摄像头,使用视频注入的方式进行图像数据仿真,如下所示:
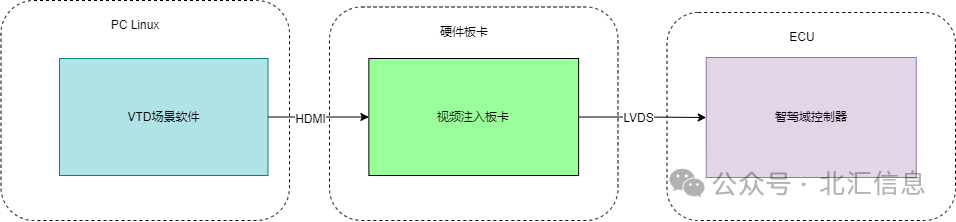
图4 环视视频注入数据流程图
在场景仿真软件VTD配置文件simServer.xml中新增一个IG视图;
在IG视图配置文件IGbase.xml对新建视图画面进行畸变配置设置画面FOV;
通过CfgDisplay.xml配置文件确定摄像头安装位置及偏转方向,并分配对应的GPU通道进行图像渲染。
3.3超声波雷达仿真
针对12路超声波雷达仿真,在场景仿真软件VTD中配置OptiX 物理传感器模型,数据传输如图5所示:
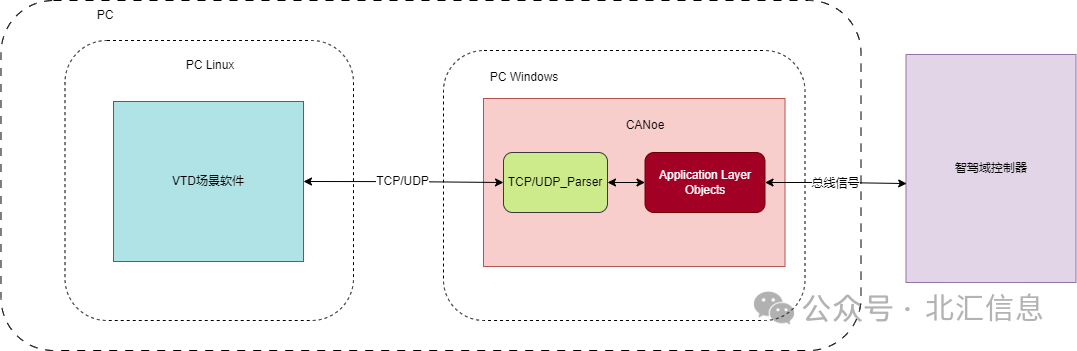
图5 超声波雷达仿真数据流程图
在场景仿真软件VTD配置文件simServer.xml中新增一个IG视图,并配置读取OptiX 物理传感器模型配置文件;
在配置文件IGbase.xml中修改配置,设置横向纵向发射的光线数量和数据存储的共享内存地址,输出障碍物距离(distance)及物体表面被光追探测到的坐标连线信息(cluster);
转发程序配置,编写转发程序读取共享内存中的数据,剔除无效数据,将传感器光追探测到的障碍物最小距离(distance)和障碍物表面每列最小坐标连线(cluster)通过TCP/UDP发送至实验管理软件CANoe;
在实验管理软件CANoe中使用CAPL进行数据处理,处理后的数据通过总线信号(如CAN FD、SOME/IP、DDS)发送至智驾域控制器中。
 案例展示4.1环视摄像头视频注入标定效果
案例展示4.1环视摄像头视频注入标定效果
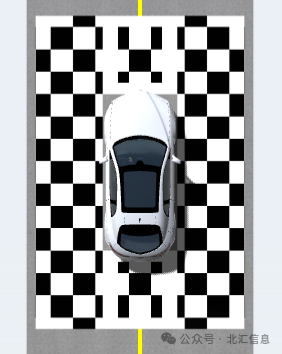
图6 VTD标定场景IG图
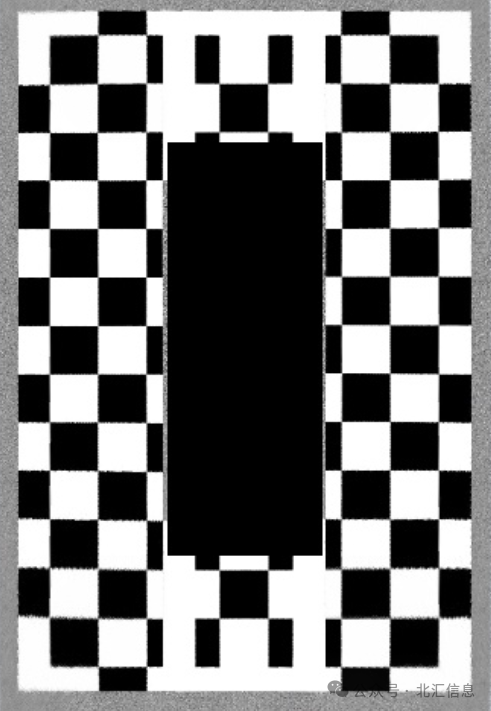
图7 4路环视融合(全景)图
4.2超声波雷达仿真效果
如下图9所示,将车身四周划分为1-16共16个扇区,其中FRS_6、RRS_7、RLS_14、FLS_15四个扇区为虚拟扇区,其数据值通过DR坐标系及邻近扇区推理算出,车头、车尾和右侧淡蓝色弧线为超声波雷达探测到障碍物形成的Cluster连线,扇区中的值为超声波雷达安装位置到障碍物的最近距离值,扇区无障碍物时默认值为5100。
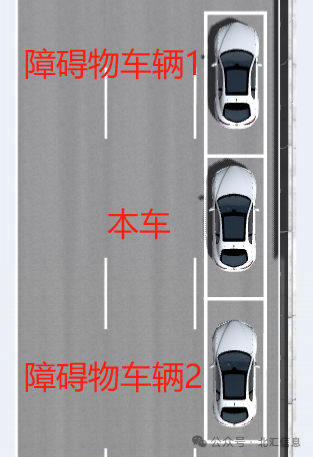
图8 VTD泊出IG图
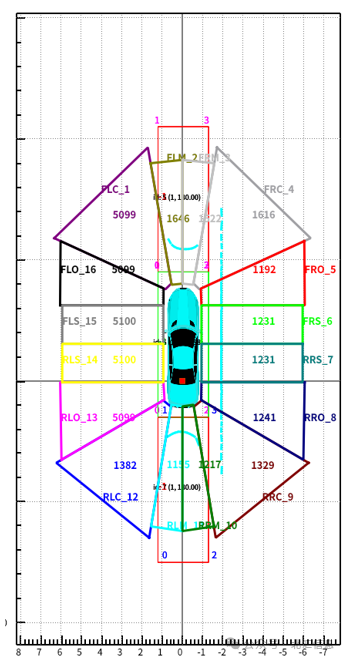
图9 超声波雷达扇区信息图
本系统能够模拟复杂的泊车场景和环境因素,包括不同类型的停车位(如平行、垂直、斜向)以及各种位置和距离的停车位。同时,模拟了多种障碍物,如锥形桶、地锁、骑行者等,以确保自动泊车系统能够准确识别不同测试场景下的不同类型障碍物。允许团队评估自动泊车系统在繁忙停车场中的性能表现,并测试在不同天气条件(如晴天、雨天、雪天)、光照情况和道路状况下的准确性、响应速度及稳定性。

总结
借助这套自动泊车 HiL仿真测试系统,可快速构建车辆及环境模型,从而模拟车辆在各种情境下的泊车状态。同时弥补实车测试场景覆盖度低、成本高等痛点,提高自动泊车功能测试验证效率。北汇信息在智能驾驶MiL/SiL/HiL/ViL测试中拥有诸多成功的方案与实施经验,在持续的项目开发中,北汇信息也致力于新方案的技术验证与实施,为中国智能网联汽车发展贡献自己的力量。
-
HIL
+关注
关注
2文章
77浏览量
18331 -
仿真测试
+关注
关注
0文章
116浏览量
11818 -
自动泊车
+关注
关注
0文章
108浏览量
14390
发布评论请先 登录
MCU硬件在环(HiL)仿真测试系统组成
新能源汽车控制器HiL仿真测试,系统构架是怎样的
【干货分享】硬件在环仿真(HiL)测试

设计仿真 基于VTD的AR-HUD仿真测试解决方案

基于V2X和自动驾驶HIL联调的仿真测试系统开发

汽车HiL测试:利用TS-GNSS模拟器掌握硬件性能的仿真艺术
智能驾驶HIL仿真测试解决方案

底盘电控系统HIL仿真测试解决方案

智能座舱HIL仿真测试解决方案

如何选择适合的智驾仿真工具进行场景生成和测试?
迈向智驾高阶验证:康谋高保真HIL仿真解决方案,重塑测试价值

智驾仿真测试团队必看:ADAS HiL测试引入3DGS的ROI测算与结论!



评论