 基于ARM与DSP的主从式双CPU嵌入式四轴运动控制器设计方案
基于ARM与DSP的主从式双CPU嵌入式四轴运动控制器设计方案
运动控制系统已被广泛应用于工业控制领域。近年来,工业控制对运动控制系统的要求越来越高。传统的基于PC及低端微控制器日渐暴露出高成本、高消耗、低可靠等问题,已经不能满足现代制造的要求 。随着嵌入式技术的日益成熟,嵌人式运动控制器已经初露锋芒。基于ARM技术的微处理器具有体积小、低成本、低功耗的特点,决定其在运动控制领域具有良好的发展前景。
PCL6045BL是一种新型专用DSP运动控制芯片,它具有强大的数据处理能力和较高的运行速度,可以实现高精度的多轴伺服控制。为解决精密制造对低成本、可移植性强的通用型多轴数控系统的迫切需求,文中给出一种基于ARM 微处理器S3C2440与DSP专业运动控制芯片PCL6045BL构成的嵌入式四轴运动控制器。该运动控制器具有高性能、低成本、体积小、可独立运行等特点,可以满足运动控制系统高速、高精度的 要求。它可广泛应用于雕刻机、机器人、绣花机以及数控加工等工业控制领域。
为解决精密制造对低成本、可移植性强的通用型多轴数控系统的迫切需求,给出一种基于ARM微处理器S3C2440和专用DSP运动控制芯片PCL65045BL组合的嵌入式四轴运动控制器。硬件上该控制器采用ARM+DSP的主从式双CPU结构,结合ARM在人机界面显示、通信接口方面的优势以及PCL6045BL高控制精度的优点。软件上在S3C2440上移植μC/OS-II实时操作系统来管理运动控制系统。该控制系统通用性较强,可广泛应用于雕刻机、机器人、绣花机以及数 控加工等工业控制领域。
1 系统总体设计
嵌入式四轴运动控制器主要由硬件部分和软件部分构成。
硬件主要包括S3C2440嵌入式主控板和PCL6045BL运动控制板两个部分。S3C2440嵌入式主控板和PCL6045BL运动控制板之间通过通用的IDE通信接口进行连接。
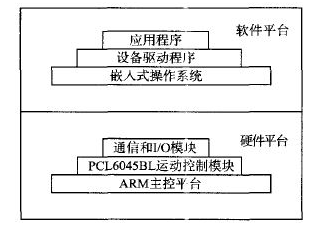
软件方面在硬件平台的基础上移植S3C2440实时嵌入式操作系统,设计Boot Loader、外设驱动以及运动控制系统的应用程序。采用上述的软硬件平台,嵌入式运动控制器可以达到开放性能好、精度高的要求。本嵌入式四轴运动控制器的结构如图1所示。

图1 嵌入式四轴运动控制器的构成
ARM具有丰富的片内外围电路,如USB接口、IIS接口、LCD控制器等,在人机界面的显示、通信接口以及系统移植方面具有更强大的功能。PCL6045BL运动控制芯片速度快,可靠性高,性能好,在运动控制方面有很大的优势。
实时操作系统μC/OS-II包含了实时内核、任务管理、时间管理、任务间通信同步和内存管理等功能,可以使各个任务独立工作,互不干涉,很容易实现准时而且无误地执行,使实时应用程序的设计和扩展变得容易,使应用程序的设计过程大为减化 。将S3C2440处理器、PCL6045BL 以及μC/OS-II三者的优势应用到本嵌入式四轴运动控制器中可以使其具有强大的功能,并缩短开发时间。
本嵌入式四轴运动控制器以S3C2440为主控平台,在ARM上移植μC/OS-II实时操作系统来进行人机界面的显示、I/O的管理、任务问的通信、指令的编译等工作。PCL6045BL运动控制模块主要负责位置控制,插补驱动,速度控制。用户的指令通过S3C2440指令编译系统的编译,通过与PCL6045BL之问的专用通信接口来控制DSP运动控制芯片发出脉冲以达到使伺服电机高速运行。
2 系统硬件设计
2.1 系统硬件平台设计
在控制系统中,以S3C2440处理器为主控核心,PCL6045BL运动控制芯片为从CPU,构建的嵌入式运动控制器结构如图2所示。

图2 系统硬件
S3C2440是一款16/32位ARM920T RISC处理器,它实现了MMU、AMBA总线和独立的16 KB指令和16 KB数据哈佛结构的缓存,每个缓存均为8个字长度的流水线。S3C2440提供全面的、通用的片上外设,不需要配置额外的部件。PCL6045BL运动控制芯片,由NPM公司生产,是一种通过总线接收CPU命令、并产生脉冲控制步进电机或脉冲驱动型伺服电机的CMOS大规模集成芯片,可提供多种输出运动控制功能,包括连续、定长、回原点等输出方式。PCL6045BL可以实现2~4轴线性插补及任意两轴圆弧插补。在这种主从结构框架基础上,主CPU S3C2440主要负责数据的存储、人机界面的显示、网络通信等管理工作。从CPU PCL6045BL输出的脉冲发送给4个轴的伺服驱动器。S3C2440只需要通过发送简单的指令给PCL6045BL,便可实现各种控制功能。
2.2 ARM 与PCL6045BL的连接
PCL6045 BL与ARM的通信是通过读写I/O总线上的几个地址来进行指令和数据的传输。PCL6045BL每个轴的内部寄存器地址由A0、A1 和A2地址线输人决定,其控制地址范围由输入端子A3和A4进行选择。因此在这种主从结构的设计中,ARM与PCL6045BL的连接如图3所示。
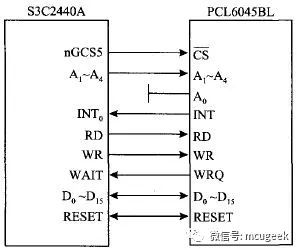
图3 PCL6045BL与S3C2440的接口电路
2.3 I/O接口电路
嵌入式四轴运动控制器与伺服电机之间是通过I/O接口电路进行连接的。I/O接口电路主要任务是完成输入信号的光电隔离以及对输出脉冲的驱动。设计中采用光电耦合器将PCL6045BL芯片与后面的伺服电机驱动器以及其他控制反馈等线路隔离。由于光耦合器输入输出问互相隔离,电信号传输具有单向性等特点,因而具有良好的电绝缘能力和抗干扰能力。又由于光耦合器的输入端属于电流型工作的低阻元件,因而具有很强的共模抑制能力。将PCL6045BL的输出信号(如CP、CW等)和输入信号(如报警、限位等)都使用光耦器件与PCL6045BL隔离,这样能有效地防止干扰信号进入主芯片损坏PCL6045BL。
3 软件设计
系统软件部分由μC/OS-II实时嵌入式操作系统及相关应用软件组成。μC/OS-II实时嵌入式操作系统仅仅提供了一个任务调度的实时内核,因而需要自行开发一系列与系统运行相关的设备驱动程序、API函数及应用程序,才能将μC/OS-II扩展为一个完整、实用的实时操作系统。
3.1 Boot Loader的设计
嵌入式系统中,通常并没有像BIOS那样的固件程序,因此整个系统的加载启动任务就完全由Boot Loader来完成。Boot Loader是系统加电后运行的第一段代码,负责初始化系统并启动操纵系统,相当于PC机的程序。Boot Loader初始化硬件设备,建立内存空间的映射图,为最终调用操作系统内核准备好正确的环境。
Boot Loader分为阶段1和阶段2两个部分,与CPU核以及存储设备密切相关的处理工作通常都放在阶段1中,且可以用汇编语言来实现;而阶段2则通常用C语言来实现一般的流程以及对板级的一些驱动支持。
阶段1主要进行定义入口、设置中断向量、系统寄存器配置、初始化寄存器等操作。而阶段2主要完成调用初始化函数、初始化闪存设备、初始化内存分配函数等操作。Boot Loader是嵌入式系统软件开发的第一个环节,把实时操作系统和硬件平台紧密地结合起来,对于嵌入式系统的软件开发尤为重要。
3.2 μC/OS-II在S3132440的移植
嵌入式实时操作系统μC/OS-II是一个源代码公开的多任务实时操作系统内核,它简化了应用软件的设计,使控制系统的实时性得到保障。良好的多任务设计,有助于提高控制系统的稳定性和可靠性。所谓移植,就是通过修改操作系统内核与处理器相关部分的源代码,使一个实时内核能在微处理器或微控制器上运行。μC/OS-II的文件系统结构包括核心代码部分,配置代码部分,处理器相关代码部分,如图4所示。其中处理器相关代码部分包括OS_CPU.H,OS_CPU.A.ASM,OS_CPU.C.C 3个文件。将μC/OS-II移植到S3C2440只需要修改与处理器相关的代码即可。

3.3 系统应用程序设计
实时应用程序的设计过程包括如何把问题分割为多个子任务,每个子任务都是整个系统的一部分,都被赋予一定的优先级,有自己的一套CPU寄存器和堆栈空间。一个任务,也叫一个线程,是一个简单的程序,该程序可以认为CPU完全只属于自己。在本设计中将任务划分为人机界面的设计、数控指令编译解释、伺服单元采集任务、状态监视等。μC/OS-II可以按照优先级启动各个任务,并通过内核来完成任务之间的调度。系统的基本流程如图5所示。
S3C2440根据系统的应用程序对指令进行解释,调用运动控制函数,继而PCL6045BL发出脉冲控制伺服电机去控制执行机构动作,实现运动控制的结果。

图5 用户程序流程
3.4 NC代码解释
运动控制器接受来自上位机发送过来的加工文件,但加工文件指令在程序中不能直接被识别,在执行指令之前必须先对其进行解析译码。解释器的主要功能就是将用户程序以程序段为处理单位,将程序中的轮廓信息、运行速度和辅助功能信息,转换成嵌入式运动控制器能够执行的格式。解释过程主要包括数控文件的读入、词法分析、语法分析以及加工信息存储数据结构等过程,如图6所示。
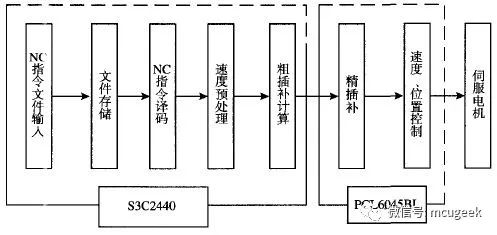
图6 程序处理流程
4 实例分析
上位机通过RS485总线与S3C2440连接,把NC指令文件输入到ARM 中,经过NC代码解释器,变成PCL6045BL能够识别的代码,从而完成规定的运动控制功能。用NC代码编写如下加工程序:
N001 COO X15 Y25//起始点选定
N002 G18//XY平面选择
N003 G90 G01 X15 Y5//准备直线插补
N004 X30 Y5//(15,5)到(30,5)
N005 X30 Y15//前行至点(30,15)
N006 X45 Y15//前行至点(45,15)
N007 X45 Y5//前行至点(45,5)
N008 X60 Y5//前行至点(60,5)
N009 X60 Y25//前行至点(60,25)
N010 X15 Y25//回到始点(15,25)
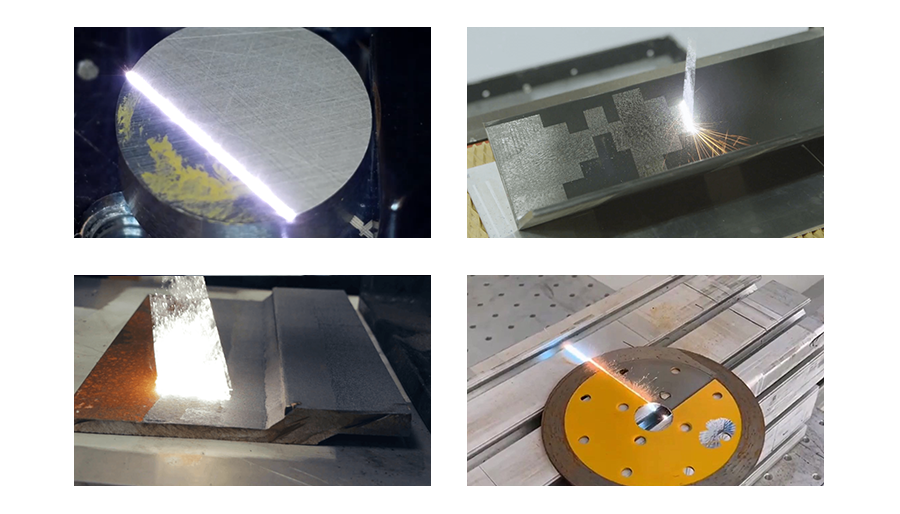
根据上面所给的代码可以完成如图7所示的多点之间直线插补的功能。

图7 多线段直线插补运动轨迹
5 结语
该运动控制器的硬件结构是基于微处理器S3C2440和PCL6045BL运动控制芯片设计的,它较好地发挥了ARM处理器的高性能、低成本和运动控制芯片的高可靠性、开发周期短的优点;在控制器硬件平台上移植μC/OS-II实时操作系统既能使整个软件系统结构简结、层次清晰,又能很好地达到运动控制实时性的要求。
-
dsp
+关注
关注
554文章
8068浏览量
351864 -
ARM
+关注
关注
134文章
9203浏览量
370853 -
嵌入式
+关注
关注
5102文章
19263浏览量
309788
原文标题:ARM+DSP的嵌入式四轴运动控制器设计
文章出处:【微信号:mcugeek,微信公众号:MCU开发加油站】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
ARM架构嵌入式主板特点

ARM嵌入式通信协议及应用
ARM嵌入式编程高效技巧

ARM MCU嵌入式开发 | 基于国产GD32F10x芯片+嵌入的开始
七大嵌入式GUI盘点
【「ARM MCU嵌入式开发 | 基于国产GD32F10x芯片」阅读体验】+书籍整体概况
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
基于S3C2440和专用DSP的嵌入式四轴运动控制器
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案

嵌入式计算系统中低压电源导轨的双同步降压控制器TPS59124数据表

嵌入式IMVP6+CPU/GPU Vcore双相D-CAP+™模式降压控制器数据表





 工商网监
工商网监
评论