 AGV读卡器在AGV自动搬运小车上应用方案
AGV读卡器在AGV自动搬运小车上应用方案

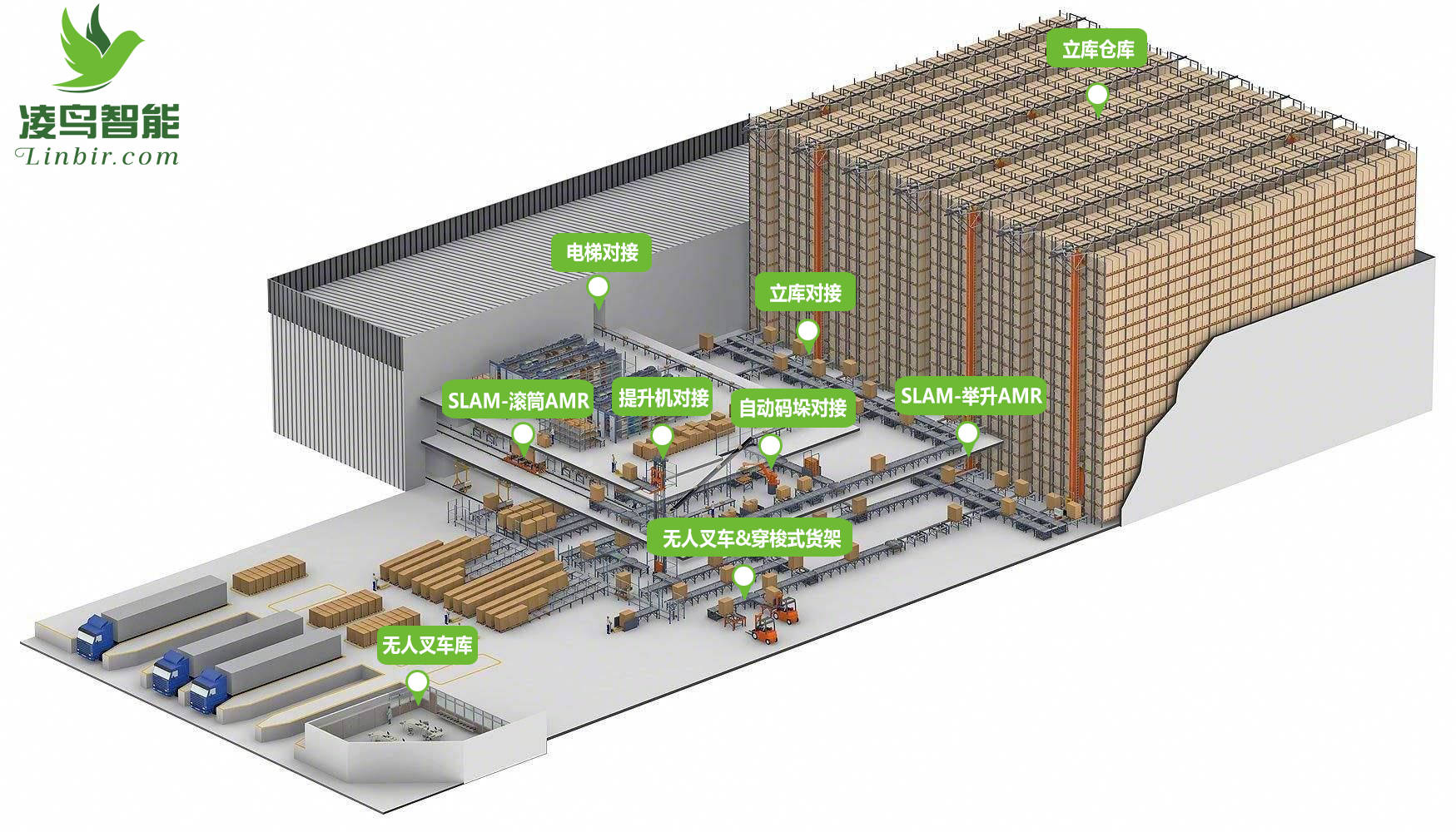
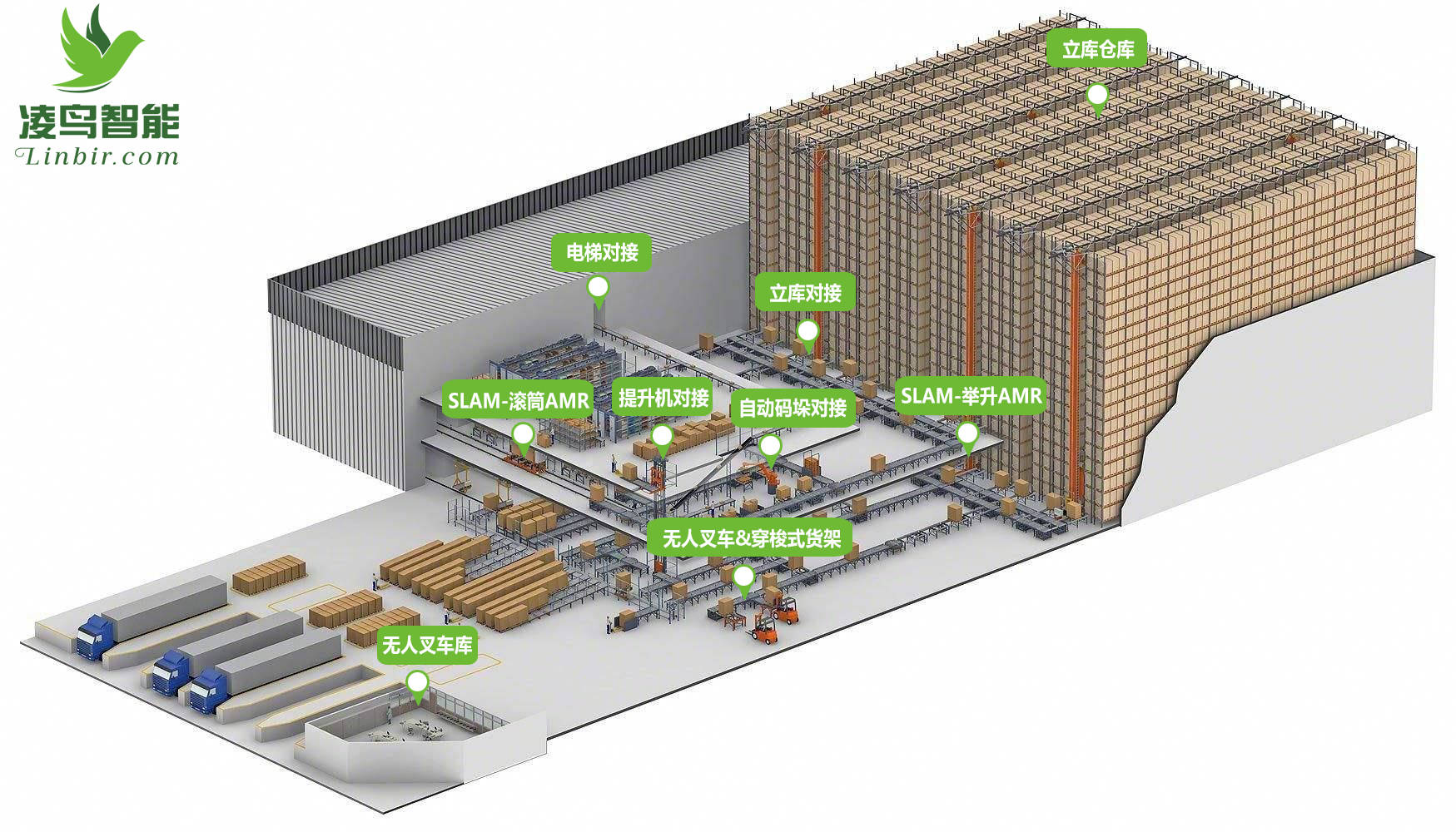
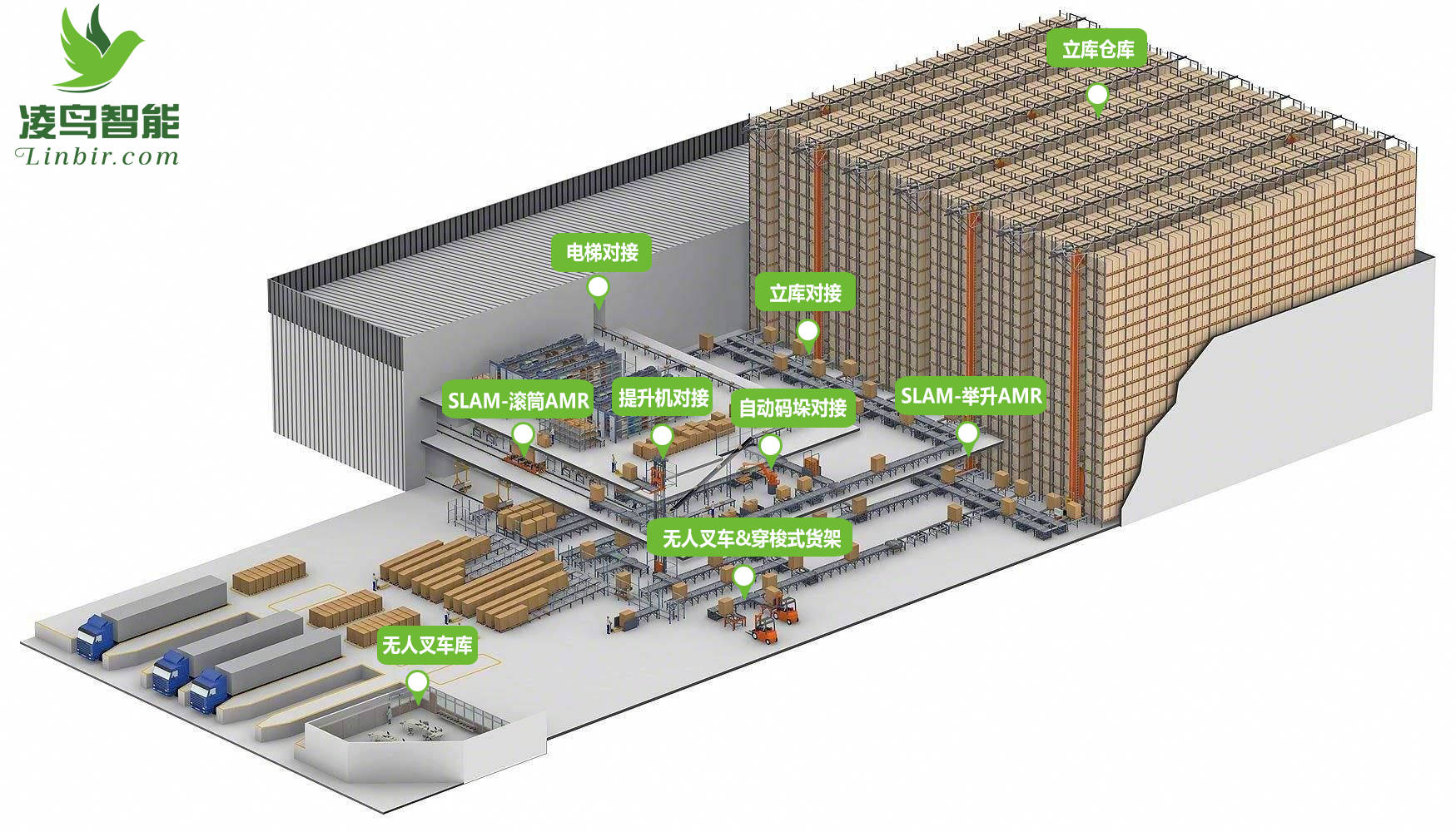
AGV自动搬运小车作为一种无人驾驶工业搬运车辆,高效高速、准确定位对于AGV小车来说十分重要。利用RFID技术控制AGV读卡器来实现站点定位,相对于其他定位方式(惯性定位、超声波定位、激光定位、二维码定位等)不仅结构简单,成本低,而且更容易实现精准站点定位。
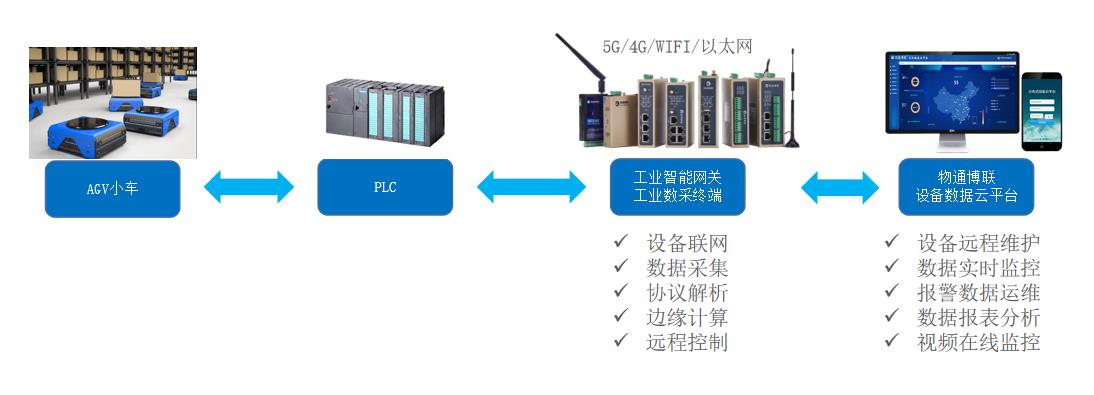
AGV小车通过PLC、单片机或运动控制板来控制,可以与上位机进行无线通信,将自己的运行位置和工作状态上报给上位机,并执行上位机的相应指令。
应用方案
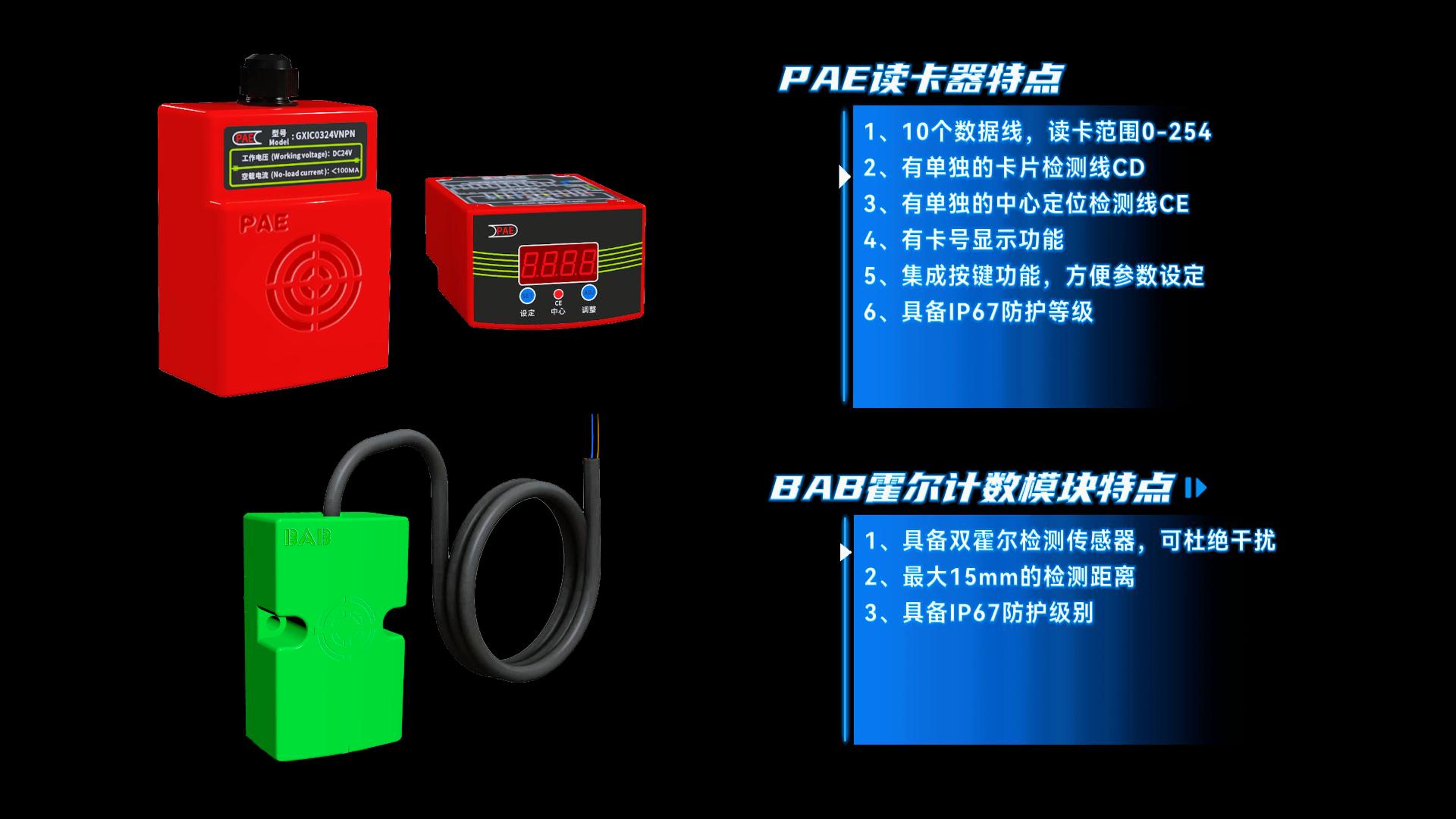
AGV读卡器:用来采集标签的数据及把采集到的信息反馈到后台,将AGV读卡器安装在AGV小车底部;
 AGV读卡器
AGV读卡器
RFID电子标签:将标签安装在地面轨道的相应节点上,并录入相应的数据信息,赋予每个节点上的标签一个ID号和定义。
 RFID电子标签
RFID电子标签
AGV小车上的AGV读卡器通过读取地面轨道的RFID电子标签信息,做出相应的动作(如改变速度、选择轨道、定位和停车等)。如在站点A处代表AGV小车经过此处时要进行拐弯,用ID0001表示。在AGV小车经过站点A处时,AGV读卡器读取A处的电子标签ID号,AGV小车控制器根据读取到的标签信息,控制小车做出相应的动作,从而实现AGV小车的调度系统功能、站点定位功能。
方案效益
通过RFID技术的快速、精准识别特点,可以使得AGV小车在高速行驶时也能准确地获取到其站点位置与工作状态。
1.相比较于其他站点识别方案,RFID站点识别方案易于安装和维护,成本低,不需要对现场进行大的改造;
2.AGV读卡器具有良好的环境适应性,能在高温、湿润、灰尘等恶劣环境下稳定工作;
3.AGV读卡器具有高速稳定识别的特点,能够保证AGV小车在连续作业中的高效率和高可靠性,提升了整体物流搬运的智能化水平。
审核编辑 黄宇
-
RFID
+关注
关注
392文章
7036浏览量
249419 -
读卡器
+关注
关注
2文章
472浏览量
42013 -
AGV
+关注
关注
28文章
1583浏览量
43834
发布评论请先 登录

金泽电气 AGV 电池管理系统 BMS:智控电池,赋能 AGV 高效安全运行

为什么AGV搬运机器人价格高低不等?


纺织厂AGV小车远程监控管理系统方案

AGV机器人如何提升搬运效率?
高效搬运+灵活转向:AGV机器人,智能物流的极简解决方案!

AGV搬运机器人联网监控系统方案
汽车工厂AGV小车联网监控系统方案
为什么AGV是工业自动化必不可少?
AGV搬运机器人负载场景选型建议
低频AGV读卡器JY-L801 Modbus RTU协议详解

倍加福电感式安全传感器在AGV小车中的应用



评论