 机器人仿真的类型和优势
机器人仿真的类型和优势

机器人仿真使机器人工程师和研究人员能够创建机器人及其环境的虚拟模型。这项技术支持在仿真的无风险环境中测试和验证机器人设计与控制算法以及与各种元素进行交互。通过使用仿真软件,可以预测和分析机器人在各种条件下的行为,而不需要物理原型。构建物理原型不仅成本高昂,而且相当耗时。
机器人仿真的工作原理
机器人仿真不仅有助于节省时间和资源,而且提供了一个安全的环境,让您在物理系统建立之前就能测试和改进机器人算法和系统。
机器人仿真的类型
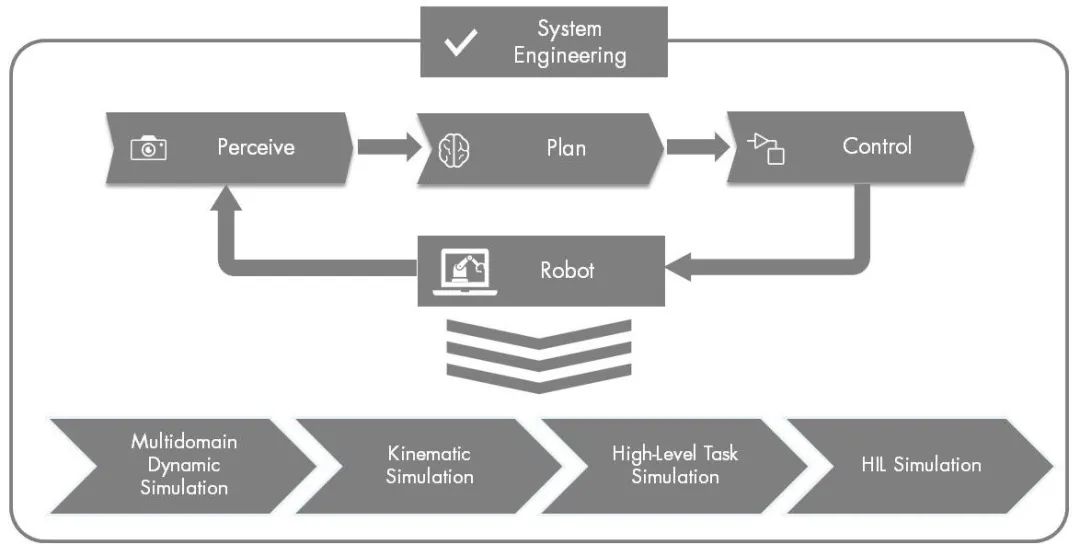
机器人仿真可以分为若干种类型,每种类型在机器人系统的开发和测试中都服务于特定用途:
多域动态仿真基于力和扭矩等物理特性,用于在真实条件下测试控制系统,以设计与其环境进行物理交互的机器人。使用基于物理的多域建模工具,您可以执行多体动态仿真,并微调机械组件、作动器和控制策略,以确保实现有效且高效的操作。
运动学运动仿真用于可视化机器人的运动,确保路径无碰撞且高效。它们对于规划和验证机器人轨迹以设计自主系统应用至关重要。在这种仿真中,您可以对机器人的 AI 和决策能力进行建模,仿真它们如何感知和响应虚拟环境,这对于自主操作来说是必不可少的。
高级任务仿真用于评估机器人执行复杂任务的能力,帮助验证机器人在特定场景下操作的有效性。高级任务仿真利用了游戏引擎的高级物理和渲染功能,并结合了传感器和场景仿真,用于仿真机器人在复杂动态环境中的输入和输出。
硬件在环 (HIL) 仿真将包括可编程逻辑控制器 (PLC) 在内的真实硬件组件纳入仿真中,支持实时测试和验证工业控制系统。HIL 仿真便于执行高度精确且高效的测试过程。这种方法至关重要,它使您能够在物理部署之前识别潜在问题、优化系统性能和确保可靠性。
上述仿真共同构成了一款全面的工具,用于开发、测试和改进机器人,以确保它们为实际部署做好准备。
机器人仿真的类型。
常见的机器人仿真软件
仿真极大地方便了机器人系统的验证和确认,并提供了一种自动执行、经济高效且可扩展的方案,以取代劳动密集型的高成本现场测试过程。机器人仿真软件具有广阔的前景,可提供满足机器人社区各种需求的定制工具:
Gazebo Sim 提供了物理建模功能和各种传感器,是关注复杂场景和室外环境的研究人员的首选工具。
CoppeliaSim 以灵活的脚本编写和一套内置函数而闻名,既适用于仿真简单的机器人系统,也适用于仿真复杂的机器人系统。
Webots 提供了一个移动机器人建模、编程和仿真平台,因其易用性和跨平台支持而在教学和研究领域广受欢迎。
RoboDK 专为工业机器人应用而设计,它提供了一种用于制造业机械臂的仿真和编程方法。
MuJoCo 是一款物理引擎,旨在仿真和控制机器人、生物机械系统及其他与系统之间存在复杂交互和接触情况的动态对象。
Unity 和 Unreal Engine 已从游戏开发扩展到机器人领域,提供高保真的可视化和物理效果,这对于机器人领域的 VR 和 AR 应用尤为有益。
NVIDIA Isaac Sim 是一个仿真平台,它利用了高级图形和 AI 技术,使得在高度逼真的虚拟环境中开发、测试和训练机器人与 AI 算法成为可能。
MATLAB 和 Simulink 以其强大的计算能力而闻名,可用于对机器人进行详细建模和仿真,以执行算法开发、测试和系统分析。它们还可以作为集成平台,支持与其他仿真器(包括上述工具)进行协同仿真。
上述每个仿真器都服务于机器人仿真的不同方面,从机器人操作臂到海用机器人,从学术研究到工业自动化和虚拟现实集成。
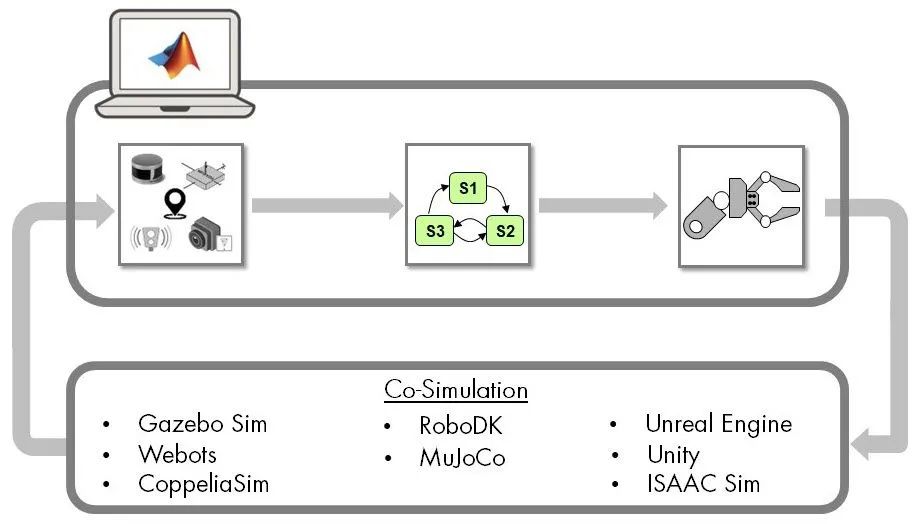
使用 MATLAB 和 Simulink 与机器人仿真器和游戏引擎进行协同仿真,以实现传感器和场景仿真。
为什么机器人仿真如此重要
机器人仿真是推进机器人系统开发和部署的关键,为系统和环境建模提供了极大的便利。它们有助于在虚拟空间中对机器人的机械结构、电子系统和软件执行详细的设计和分析,使开发人员可以在不带来现实风险的情况下识别设计缺陷并优化性能。仿真包括:
系统建模。仿真用于创建和分析机器人系统的设计,有助于理解在虚拟环境中进行系统建模时的组件交互。这可以优化系统性能,确保产品功能符合预期。
环境建模。环境建模可对机器人操作时所处的物理世界进行仿真,通过各种设置测试导航和任务执行。这种安全、高效的方法可以在各种条件下测试机器人,而不需要真实世界的测试成本。
虚拟调试。它在虚拟环境中验证机器人的控制策略和系统集成,从而减少停机时间,提高系统运行时的效率。
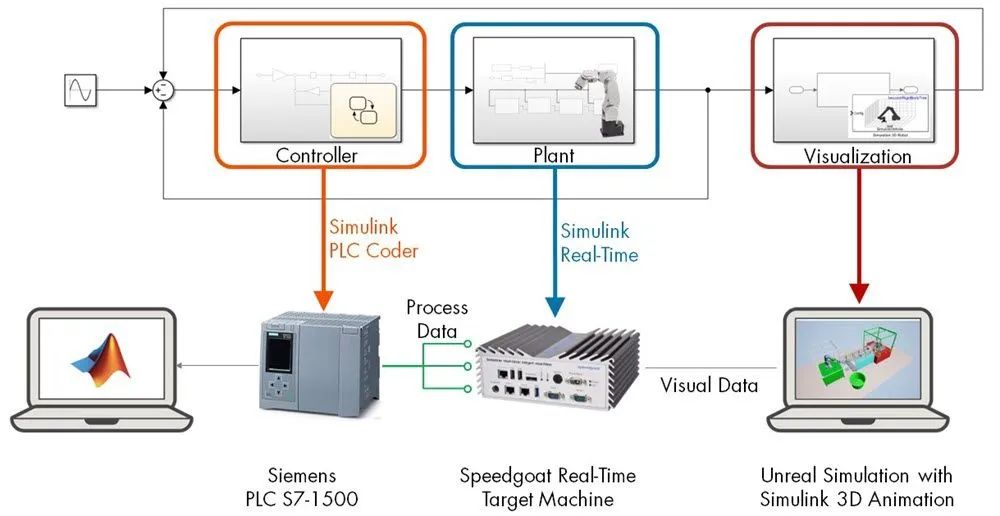
工业机器人的虚拟调试设置,包括 PLC 机器、实时目标和可视化。
机器人仿真对于优化机器人并使其适应真实工作条件是不可或缺的。它能够确保安全性,最大限度地减少物理原型以降低成本,并支持快速迭代来加速开发过程。
机器人仿真的主要优势
确保安全和降低风险:通过在虚拟环境中进行测试来防止潜在危险。
成本效率:通过使用虚拟测试节省材料和减少试验。
快速原型构建和测试:支持快速评估和迭代。
算法开发和验证:为微调算法提供可控环境。
设计优化:有助于在工业环境中配置高效的生产布局。
环境测试:评估不同条件下的机器人,以确认操作能力。
随着机器人技术日趋复杂,机器人仿真的应用也日益广泛。这种仿真提供了一种安全、经济、高效的开发方法,确保机器人为部署做好充分准备。
机器人仿真的功能和面临的挑战
机器人仿真具有多项关键功能,有助于增强它在机器人领域中的实用性和有效性。这些功能旨在确保仿真尽可能逼真和有用,涵盖从基于物理的建模到逼真环境的广泛范围。然而,尽管机器人仿真取得了这些进步,但开发人员仍面临着许多挑战。这些挑战可能会阻碍机器人仿真的有效应用。
通过 Simulink 3D Animation 虚幻引擎接口,实现具有两个机器人工作单元的虚拟装配线的自动化。
机器人仿真的关键功能
基于物理。仿真基于物理特性,可以确保实现逼真的机器人行为,从而模拟真实的物理交互。
传感器模型。机器人仿真对于机器人环境交互至关重要,它提供了仿真各种传感器输入的功能,使开发人员能够测试机器人将如何感知其周围环境。
图像真实化。高级仿真提供逼真的图像环境,这对精确的视觉数据处理和决策算法至关重要。
连接性。仿真可与其他软件工具和系统相连,以实现全面的多系统集成。此功能对于无缝集成机器人操作系统 (ROS)尤为重要。
多域仿真。通过仿真各种环境,包括电气和机械系统,可以仿真复杂条件下的机器人。
速度。高效的设计可实现复杂机器人场景的快速迭代和测试。
用户界面 (UI)。直观的 UI 至关重要,它有助于用户轻松导航仿真软件、管理设置以及可视化操作和交互。
虚幻引擎中的箱内取物协作机器人仿真。
机器人仿真面临的挑战
虽然机器人仿真提供了许多好处,但开发人员也遇到了若干挑战,这些挑战可能会限制其有效性:
可扩展性和复杂性。在不降低性能的情况下扩展复杂系统的仿真充满挑战。
真实感和保真度。在仿真物理交互和机器人行为时实现高度真实感需要复杂的模型。
计算需求。高级仿真需要大量的计算资源,这会限制速度和可访问性。
传感器噪声和不确定性建模。精确复制机器人传感器中的固有噪声和不确定性相当困难,但这是开发稳健的感知算法的必要条件。
场景和环境搭建。针对测试设计各种逼真的场景和环境非常耗时,而且通常需要专业知识。
通过持续集成进行集成。将仿真纳入持续集成管道具有一定难度,这要求仿真成为开发周期的一部分。
无论是对于开发过程的各个阶段,还是对于从数字原型构建到运维的整个产品生命周期,机器人仿真都至关重要。这种仿真提供了一个虚拟环境,用于在构建和部署系统之前对其进行测试和优化,以便可以及早检测设计缺陷和验证系统性能。因此,必须克服上述挑战,才能充分发挥仿真在机器人开发中的潜能。
使用 MATLAB 进行机器人仿真
使用 MATLAB 进行机器人仿真需要一种以基于模型的设计为中心的综合方法。此设计流程可用于创建机器人系统的数字孪生。通过基于模型的设计,MATLAB 有助于尽早识别潜在挑战,优化系统功能,并确保机器人在真实场景中的表现符合预期,从而简化开发过程。以下是如何使用 MATLAB 进行机器人仿真的细分阶段:
创建数字孪生。首先,使用 Simscape 和 Robotics System Toolbox 在 MATLAB 中为您的机器人系统建模,以创建一个数字孪生。这种数字表示是仿真的核心,支持详细的分析和验证。
多域仿真。使用 MATLAB 和 Simscape 在单一环境中对各种域进行仿真。此步骤包括物理建模和动态仿真,使您能够在统一空间中测试机器人功能的不同方面。
机器人自主性设计。使用 Robotics System Toolbox,您可以仿真和测试机器人的自主性,探索它如何响应各种场景和环境,而无需物理原型。
自动化测试。MATLAB 支持采用基于模型的设计执行自动化测试,使您能够根据系统需求高效地验证您的机器人。这种方法可以确保机器人的每个组件都符合必要的标准。
逼真的仿真。通过将 MATLAB 和 Simulink 3D Animation 与虚幻引擎的逼真仿真功能相结合,可以提供一个强大的平台,用于在高度逼真和复杂的虚拟环境中训练 AI 模型,以便能够在接近模拟真实条件的场景中开发、测试和优化复杂的算法,从而提高 AI 系统在各种应用中的效率和可靠性。
代码生成。数字孪生也可以作为代码生成的基础。此功能有利于早期和持续的测试和验证,并简化从仿真过渡到现实部署的过程。
集成和协同仿真。Simulink 可作为强大的集成平台。您可以纳入使用 C/C++ 或 Python 编写的内部代码,并在 Simulink 环境中使用第三方软件和仿真器。ROS Toolbox 对于使用各种仿真器和硬件执行的协同仿真特别有用,可以增强机器人仿真的真实感和深度。
使用 MATLAB,您可以有效地仿真机器人,涵盖从其物理动力学到其自主行为的整个范围。这种方法不仅可以加速开发过程,而且能够提高最终机器人系统的可靠性和性能。
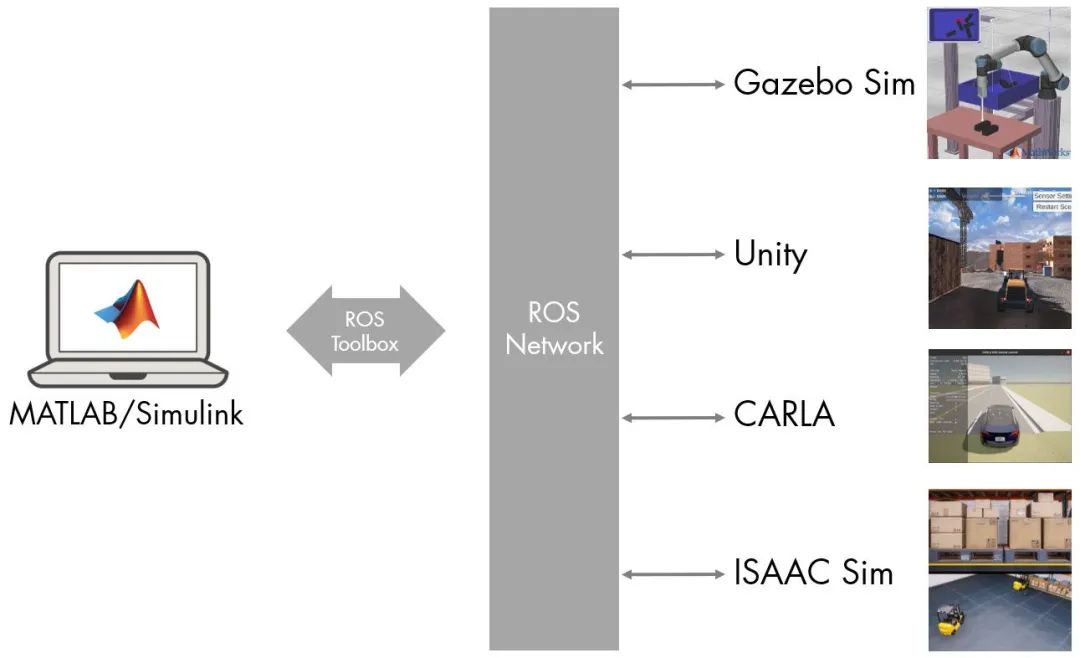
ROS 用于 MATLAB 和 Simulink 与各种外部仿真器的协同仿真。
-
传感器
+关注
关注
2578文章
55774浏览量
795108 -
机器人
+关注
关注
214文章
31612浏览量
224325 -
仿真
+关注
关注
55文章
4560浏览量
138801 -
仿真软件
+关注
关注
21文章
287浏览量
32017
原文标题:四大须知 | 什么是机器人仿真?
文章出处:【微信号:MATLAB,微信公众号:MATLAB】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录



评论