 为自动驾驶发展铺路ADAS SoC须兼顾性能/安全
为自动驾驶发展铺路ADAS SoC须兼顾性能/安全
从Karl Benz发明汽车到福特(Ford)率先投入量产,汽车的发展之路由来已久,辅助驾驶的各种装置也在此后逐渐成长;上个世纪末期的80年代,更诞生了第一个导入半导体的辅助装置:以GPS为基础的汽车导航系统。
时至今日,几乎每一台车都配备了防锁死煞车系统(Anti-Blocking System,ABS)和电子车身稳定系统(Electronic Stability Program, ESP),透过高品质电机装置的使用,来提供驾驶和汽车的乘客更佳的安全性。毕竟,从60年代开始的自动驾驶汽车理想也正逐步实现,只是时间的问题而已(图1)。
图1 1950年代的人们对自驾车的想像
图片来源:维基百科
除了油电混合电动车和电动车之外,先进驾驶辅助系统(ADAS)和自驾车亦是瑞萨在自动化市场的重点。ADAS和自驾车应用需要系统单晶片(SoC)高阶的运算能力,来分析车子的周遭环境和认知运算(Cognitive Computing),并透过其高效能的控制功能,让驾驶汽车既安全又舒适。然而,被汽车制造业者和消费者公认为终极目标的自动驾驶完全实现之前,ADAS将以相当的规模大幅成长(图2)。
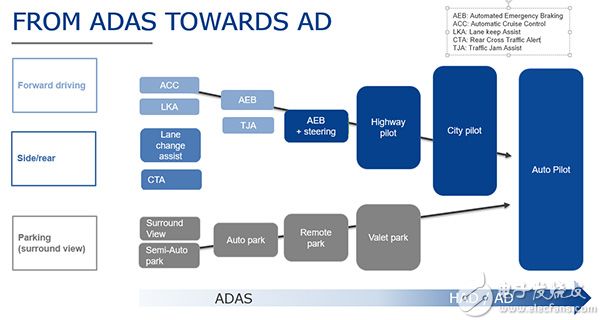
图2 ADAS的最终目标是实现自驾车
借ADAS提升驾驶体验三大区块/功能安全不可少
ADAS的首要目标是为驾驶员提供安全方面的帮助,对于其他移动和行人交通参与者来说也是如此。此外,ADAS应该要增强驾驶人的驾驶舒适度,而且要能够改善经济和环境之间的平衡。
一个典型的ADAS是由三个主要建构区块组成(图3),包含:感测/分析区块(Sensing and Analyzing)、融合/决策区块(Deciding)、控制区块或称致动器区块(Controlling)。感测/分析元件、融合/决策元件是车子的「眼睛和头脑」,它们具备驾驶辅助功能或者可进行自动驾驶。这个系统能够侦测、辨识和接收来自车辆周围的资讯,将这些数据结合之后,再根据交通状况进行决策。控制部分根据作出的决定执行命令,而得以舒适且安全地驾驶汽车。
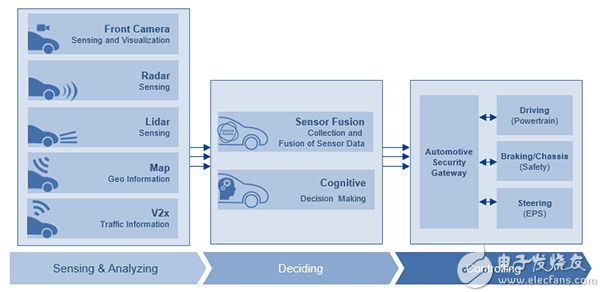
图3 ADAS运行架构示意图示意
由于这些元件最终对ADAS和自动驾驶都极为重要,瑞萨电子已经推出具自主性、开放性、创新性且可信赖的Renesas autonomy平台,可供辅助驾驶和自动驾驶所用。
瑞萨ADAS解决方案所具备的自主性,能够提供各种选择方案,让客户选择最适合其所需的核心元件。从具弹性且可编程核心到高度最佳化硬体加速器,瑞萨提供的选择,能够在最低的功耗下,提供最高的效能。除了高效能之外,功能性安全(Functional Safety)也是实现ADAS以至自动驾驶的关键。
汽车产业目前正广泛地使用ISO26262的安全标准,让具关键性的安全功能达到安全性的目标。微处理器提供对ASIL-D的支援,例如支援ASIL-D的RH850-P1H系列,正逐渐成为标准。然而,在复杂且具高效能的SoC上满足安全要求是新的课题,随着人们对自动化汽车日益增长的需求,此一议题的处理就变得相当必要。
由于SoC架构的复杂性,要在额外增加最少的系统成本之下来实现功能安全,就需要对底层安全机制的整合,有相当详细的Know-How和经验。在自动驾驶模式的关键安全方面,针对安全要求的详细分析和目标应用案例必须一并列入考虑。这是评估安全方面的相关性与大规模生产成本效益的唯一方式。
瑞萨自2008年起,已经在其P系列的微处理器上首次实现安全性功能,并已遵循包含了整合性安全概念的ISO 26262认证。同样的情形也适用于其R-Car系列SoC,它们也包含了一个具安全性的作业系统。
协助辨别号志、路况前置摄影头具发展潜力
在ADAS和自动驾驶的环境下,汽车的前置摄影镜头是一个独特的感测器。它和雷达、光达或超音波等感测技术最大的不同是在于,前置摄影镜头能够辨识路标,交通标志和红绿灯(图4)。除此之外,它也能够侦测物体。例如,透过提供数据以便于辨识汽车或行人,侦测他们的移动路径并测量距离等。藉由这样的方式,前置摄影镜头就是感测器,能够在良好的视线条件下启动自动紧急刹车或者提供自动驾驶车辆所需的资讯。
图4 前置镜头在ADAS上的应用范例
因此,前置摄影镜头对于要遵守NCAP要求的汽车制造业者而言,扮演着相当重要的角色。这个要求可以减少车主和其他用路人之间发生的意外。可以预期的是,在未来的车辆上会大量配备前置摄影镜头。这就需要能够以最低的成本,来提供前置摄影镜头给汽车业者才行。
前置摄影镜头的挑战是如何在低功耗的前提下满足对高效能电脑视觉和高水准功能性安全的需求。这是一个严格的要求,因为小型的前置摄影镜头机身,包含感测器本身和SoC,而摄影镜头是被放在挡风玻璃旁边,在这个位置上,前置摄影镜头暴露在直射的阳光下,这样会增加前置摄影镜头顶部所产生的温度。因此,前置摄影镜头上零件的功耗必须维持在最小的状态。
来自瑞萨自主平台的V3M是针对NCAP前置镜头所设计的,其架构如图5所示,能为电脑视觉带来高效能、低功耗和高度的功能安全性。利用不同的加速器,V3M实现具顶级效能的电脑视觉异质平台:由DMA所提供的一个多功能管线引擎(IMP)和一个电脑视觉引擎(CVE),用以控制记忆体传输,让R-Car V3M更适用于演算法如光流、物体侦测和分类,深度神经网路和卷积神经网路等。
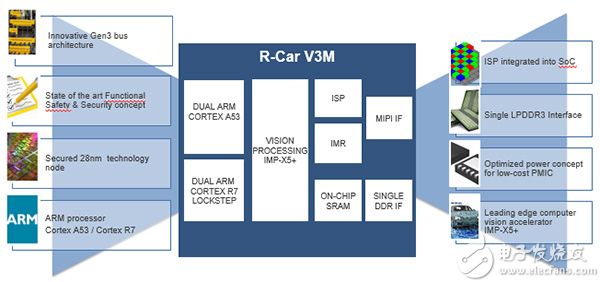
图5 R-Car V3M架构
V3M配备一个整合型影像信号处理器(Image Signal Processor, ISP),可以增强来自照相机感测器的原始图像的品质,使其可以为机器视觉识别做好准备。这样的整合省却了在前置镜头或在感测器本身额外增加一个ISP元件的需求。此系统拥有一个单一的DDR3L记忆体通道。
另外,V3M尚整合一个双Cortex A53供应用软体所使用和一个Cortex R7 Lockstep核心来执行Autosar(图6)。当使用案例包含Cortex R7 Lockstep核心和额外的安全特性时,其应用领域是专门用来符合ASIL B的安全性评等,以达到ASIL-C的安全性等级。这个合理的架构减少了对外部元件的需要,并将物料表内容维持在最少的状况,同时也提供高性能并随时确保安全性。
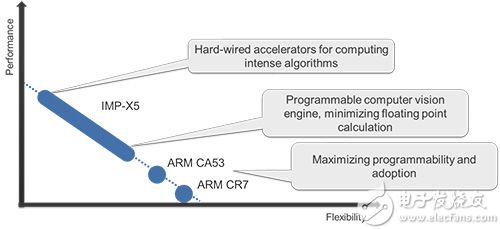
图6 V3M所用元件之性能、弹性关系示意图
(本文作者为欧洲瑞萨电子汽车ADAS及安全解决方案事业处全球ADAS中心经理)
-
adas
+关注
关注
309文章
2165浏览量
208501 -
自动驾驶
+关注
关注
783文章
13647浏览量
166060
发布评论请先 登录
相关推荐
自动驾驶汽车安全吗?






康谋分享 | 直面AD/ADAS快速开发挑战:IVEX自动驾驶场景管理及分析平台!






 工商网监
工商网监
评论