 能随时随地通过网络访问该平台所有电机的控制系统
能随时随地通过网络访问该平台所有电机的控制系统

近年来,随着因特网的日益普及和网络远程控制技术的发展,利用网络对实验室或者工业现场中控制对象进行远程控制,已经越来越受到重视,应用范围也越来越广泛。以Internet为基础的远程控制方式,可以避免现场环境对用户的不良影响,不需要建立特殊的操作站或者辅设专用线路,而是直接利用现有的网络设施提供的价格低廉的通信线路作为系统构架,硬件设备投资少,大大降低了远程控制系统的成本。与传统的控制技术相比,基于网络的多对象远程控制系统利用计算机作为网络信号传输终端,不仅能够延长控制器与被控对象之间的空间距离,而且具有较高的故障诊断能力,安装与维护简单,可以提高系统的灵活性和可靠性。而且控制网络技术正向体系结构的开发性网络互联方向发展,开放性控制网络具有标准化、可移植性、可扩展性和可操作性。
NI myDAQ 是美国国家仪器有限公司(National In-struments,NI)推出的一款便携式仪器,在轻巧的组成结构中集成了8款最常用的软件仪器,而且配有USB即插即用功能,可针对各种测量进行快速方便的采集与显示,方便了控制信号的输入输出。NI myDAQ将软件与硬件集合成了一个整体。硬件上myDAQ集成多达20路的信号通道,其中包含了8路数字I/O,4路模拟I/O口以及示波器、数字万用表、各类电源和伯德图分析仪,一方面可以方便的利用这些数据通道采集被控对象状态信息、发送控制命令,另一方面还可以将实验结果借助于虚拟仪器形象化的表达出来。在软件上myDAQ的开发采用图形化系统设计软件LabVIEW 进行编程设计,利用集成化、形象化、模块化的图形编程方式可以快速方便的编制出实验程序。采用LabVIEW的基于Web发布工具可以方便的实现网页的远程发布,为远程控制提供了可能。本项目研究的“基于myDAQ的远程多对象控制系统”可实现随时随地通过网络访问该平台完成交流电机、直流减速电机、伺服电机、倒立摆、步进电机、电阻炉的相关控制和任意切换,极大的方便了教学及实验需要。
1 系统的整体设计与工作流程
基于Internet 的远程控制系统的模式主要有C/S(Client/Server)结构、B/S(Brower/Server)和C/S/B(Client/Server/Brower)结构[3].C/S/B 常用于大型的集散控制系统的发布和远程控制,适用于虚拟仪器测控系统。C/S模式适合于局域网环境,但是使用用户数量有限,系统扩展维护较为复杂、软件的开发成本也较高。B/S模式下,主要由现场过程控制实验装置、远程实验代理服务器、Web服务器、数据库服务器、远程实验工作站等组成,通过实验室的以太网和Internet将它们连接起来。B/S模式具有客户端数量不受限制、软件开发相对简单、系统扩展维护简单等优点。所以,本设计选择B/S模式。
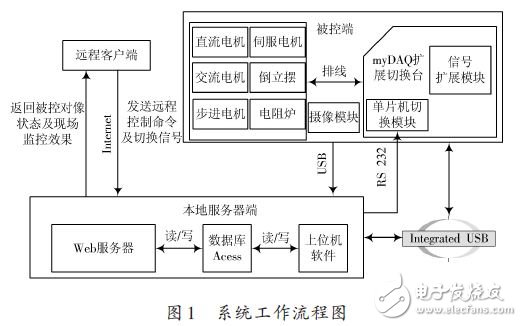
该系统主要由3 大部分组成:远程客户端、本地服务器端、现场被控端。其中又以现场被控端的设计最为复杂。远程客户端是一台连入因特网的计算机。本地服务器端是一台装有Web 服务器的主机,该主机需要安装LabVIEW及相关驱动的软件。该主机是使远程客户端和本地服务器端进行通信的桥梁。现场被控端又细分为三部分:信号源扩展及切换控制平台、多对象驱动控制台(直流减速控制台、交流电机控制台、伺服电机控制台、步进电机控制台、倒立摆控制台、电阻炉控制台)、摄像头监控。
该远程控制系统完成后,实验者可以通过任意一台接入因特网的计算机来登录远程控制系统。通过链接进入整个系统的网址,验证操作者的身份后进行操作,此时要求本地服务器端相关的LabVIEW软件及VI程序是打开的。操作者进入运行界面后可选择对应的控制台进行远程控制。当选择某一个控制台时本地服务器就会将相应的命令信号通过串口和采集卡分别送到信号源扩展及切换控制平台上的单片机和myDAQ,这样myDAQ 就会切换到对应的控制平台上,此时该平台上的所有信号也和myDAQ 连通了,从而有效地进行相关控制。其工作流程如图1所示。
2 本地服务器
本地服务器主要包括实验室服务器(Lab Server)和服务代理端(ServICe Broker),是实验系统的基础,是连接实验客户端和实验仪器设备的桥梁。服务器为用户构建一个远程实验交互平台,负责整个系统的任务调度和网络管理等工作。系统采用B/S模式,绝大部分运算和处理功能在Web服务器端实现。
远程控制的发布实现过程如下:通过开启Lab-VIEW 的Web 服务器,可以在网页上发布LabVIEW 程序,使本地或远程的客户端计算机可以实时浏览或控制Web服务器中的远程面板,实现生产环境的远程控制。
使用LabVIEW 的Web 发布工具:Tools/Options,在弹出的对话框中完成与Web服务器有关的设置和LabVIEW程序的发布通过Tools/Web Publishing Tools对话框,可以将Web内存中的程序,以网页的形式发布,在客户端进行浏览。远程客户端根据安装软件的不同可采取相应的访问登录方式。
本设计选择使用网页浏览器在网页中操作远程面板。当进入远程控制前面板之后,实验者单击鼠标右键,然后在弹出的菜单中申请vi控制权,当多个远程客户端同时申请控制权时,只能有一个客户端有控制权,其他的需在控制权释放后重新申请并获得控制权。
3 现场被控端设计
下位机被控端的设计是整个控制系统的核心部分,主要包括:信号源扩展及切换控制模块的设计、被控对象控制模块、LabVIEW程序实现。
3.1 信号源扩展及切换控制模块设计
为了保持与原有系统的兼容性,扩展信号的通道与原有实验平台的数据通道保持一致,结合NI公司提供的内部引脚资料进行扩展设计。设计中运用模拟开关技术,模拟开关是一种能够按照控制指令对模拟信号传输进行通断控制的电路器件。通过模拟开关芯片CD4053、CD4051将myDAQ 上的信号扩展成六路信号,然后将每一路信号汇总通过排线连接至六个控制分板。模拟开关在应用中,一定要注意输入信号不要超出规定的范围。
对于切换控制模块,将其与信号扩展模块做在同一块电路板上,图2是信号源扩展及切换板的PCB图。
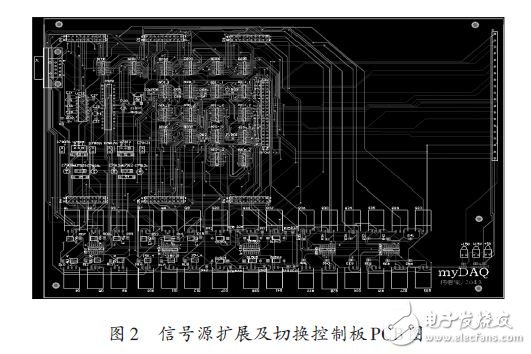
切换控制模块主要采用AVR 单片机系列中ATmega8,ATmega8 是一款采用低功耗CMOS 工艺生产的基于AVR RISC结构的8位单片机,片内集成了较大容量的非易失性程序和数据存储器以及工作存储器。利用AVR 单片机的软编程技术,在单片机FLASH 底层固化一个Bootloader程序,来引导远程传来的程序数据写入FLASH应用区。本设计就是利用该原理设计的单片机切换程序。
3.2 被控对象控制模块设计
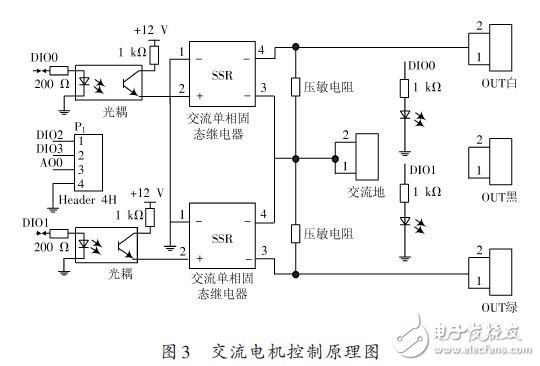
对于被控对象控制模块,主要包括被控对象平台板及被控对象(直流减速电机、交流电机、伺服电机、步进电机、倒立摆、电阻炉)控制模块的设计。被控对象平台板是将扩展板上分出的六路信号收集起来,然后在分至PCI口和拓展口。这里以交流电机的控制板设计为例进行说明。
交直流电机的控制主要有电机的启动、停止;电机的换向;电机的变频调速。其控制原理图如图3所示。
3.3 LabVIEW程序实现
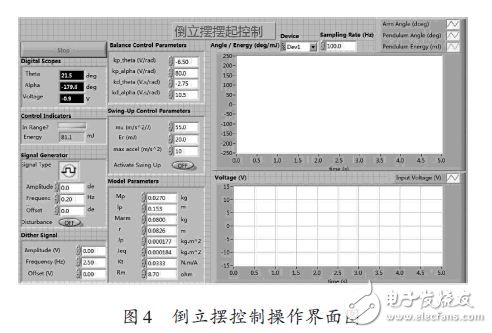
编程实现采用LabVIEW 软件进行编写,这是一种图形编程语言也叫G 语言[11]。这一部分主要由实验选择切换界面、被控对象操作界面、摄像监控界面三部分组成。实验选择切换界面包括选择实验预览按钮和操作按钮,选择某一实验预览按钮,将弹出实验介绍图片,便于用户了解和学习实验原理并预览实验效果图。选择相应被控对象开始试验按钮,则弹出对应不同被控对象控制板的LabVIEW 操作子VI.摄像监控界面利用LabVIEW 软件自带的工具包编写然后嵌在每个被控对象控制程序里面。被控对象操作界面的编程设计是重点,倒立摆控制的操作界面如图4所示。
4 远程客户端设计
实验客户端是运行在网络终端的用户计算机。因为控制平台的程序都由服务器承载和执行,并且提供了相应的操作界面,任何连接在Internet上的PC机都可以使用浏览器登录到网站进行远程控制。
此时要求本地服务器端相关的LabVIEW软件及VI程序是打开的。操作者进入运行界面后可选择对应的被控对象控制台进行远程控制。当多个客户端同时监控服务器端时,可以多个同时控制,但只能有一个客户端有控制权,其他的需等待释放后获得控制权。
5 结论
本文的基于myDAQ的远程多对象控制系统的设计方案, 该方案中的远程控制系统成功的结合了单片机IAP技术、模拟开关技术以及LabVIEW 的Web 发布技术,实现了不拘于时间、地点、场地要求的多种被控对象远程控制系统。用户只需一台联网的普通PC 机即可完成相应功能。通过本系统一方面可以远程控制现场的各种被控对象,另一方面通过摄像头还可以对现场的运行状况进行查看,增加了真实性。该系统已经通过了测试在学校范围内稳定运行。而且底层平台还具有很强的扩展性,用户可以根据自己的需要在被控端添加其他的被控对象,简单快捷、实用性高。
-
信号源
+关注
关注
5文章
564浏览量
47821 -
计算机
+关注
关注
19文章
7836浏览量
93447 -
电机
+关注
关注
145文章
9694浏览量
154738 -
因特网
+关注
关注
1文章
41浏览量
13253
发布评论请先 登录
GPS卫星定位儿童手机 随时随地找到孩子
华强网正式推出手机版了,随时随地做生意,在车上、在...
【创龙AM4379 Cortex-A9申请】 智能家居控制系统设计
用于电机控制系统与设计(6)
基于机智云服务平台的媒体设备控制系统

2022百度世界大会—飞桨赋能477万开发者 让AI随时随地在身边

虹科方案 | HK-Edgility系统随时随地保护您的远程工作




评论