 什么叫系统的频率响应函数?它和传递函数有何关系
什么叫系统的频率响应函数?它和传递函数有何关系

系统的频率响应函数(Frequency Response Function, FRF)是描述线性时不变(Linear Time-Invariant, LTI)系统在不同频率下输入和输出之间关系的数学工具。它是一个复数函数,通常用H(jω)表示,其中ω是角频率,j是虚数单位。频率响应函数可以提供系统在频域内的行为特征,包括系统的增益、相位以及共振频率等信息。
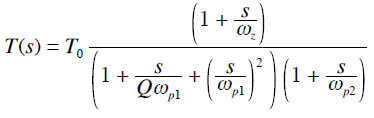
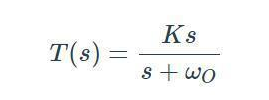
频率响应函数与传递函数(Transfer Function, TF)有着密切的关系。传递函数是描述线性时不变系统输入和输出之间关系的复数函数,通常用H(s)表示,其中s是复频率变量,可以表示为s = jω。传递函数是系统在频域内的行为特征,它包含了系统的动态特性和稳态特性。
频率响应函数和传递函数之间的关系可以通过以下步骤来理解:
- 拉普拉斯变换与傅里叶变换的关系
传递函数是通过拉普拉斯变换(Laplace Transform)得到的,而频率响应函数是通过傅里叶变换(Fourier Transform)得到的。拉普拉斯变换是一种积分变换,可以处理时域信号的微分和积分,适用于描述系统的动态特性。傅里叶变换是一种线性变换,可以将时域信号转换为频域信号,适用于分析系统的频域特性。
- 复频率变量与角频率的关系
传递函数中的复频率变量s与频率响应函数中的角频率ω之间存在一定的关系。当s = jω时,传递函数H(s)可以表示为H(jω),即系统的频率响应函数。这意味着,通过将传递函数中的复频率变量s替换为jω,我们可以得到系统的频率响应函数。
- 系统的稳态特性
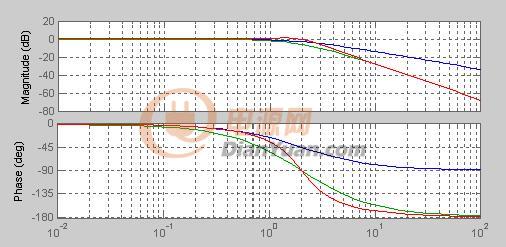
传递函数可以描述系统的稳态特性,即系统在长时间内的行为。而频率响应函数则可以提供系统在不同频率下的稳态特性。通过分析频率响应函数,我们可以了解系统在不同频率下的增益和相位特性,从而判断系统的稳定性和性能。
- 系统的动态特性
传递函数可以描述系统的动态特性,即系统在瞬态过程中的行为。而频率响应函数则可以提供系统在不同频率下的动态特性。通过分析频率响应函数,我们可以了解系统在不同频率下的共振频率、阻尼比等信息,从而判断系统的动态性能。
- 系统的滤波特性
传递函数可以描述系统的滤波特性,即系统对不同频率信号的过滤效果。而频率响应函数则可以提供系统在不同频率下的滤波特性。通过分析频率响应函数,我们可以了解系统对不同频率信号的增益和相位特性,从而判断系统的滤波性能。
- 系统的稳定性分析
传递函数可以用于系统的稳定性分析,即判断系统是否在给定的输入下保持稳定。而频率响应函数则可以提供系统的稳定性信息。通过分析频率响应函数,我们可以了解系统在不同频率下的稳定性,从而判断系统是否稳定。
- 系统的控制设计
传递函数在控制系统设计中具有重要应用,可以用于设计控制器以实现系统的稳定和性能要求。而频率响应函数则可以提供系统的控制设计信息。通过分析频率响应函数,我们可以了解系统在不同频率下的控制性能,从而设计合适的控制器。
总之,系统的频率响应函数是描述线性时不变系统在不同频率下输入和输出之间关系的数学工具,它与传递函数有着密切的关系。
-
频率响应
+关注
关注
1文章
105浏览量
18879 -
函数
+关注
关注
3文章
4423浏览量
67888 -
傅里叶变换
+关注
关注
6文章
446浏览量
43813
发布评论请先 登录
开环传递函数是怎样影响系统的?
传递函数和控制Block(上)

传递函数极点和零点的影响是什么
DC/DC转换器:针对各控制系统的传递函数共通化-前言



评论