 机器视觉系统硬件组成之工业相机篇
机器视觉系统硬件组成之工业相机篇
工业相机是一种非常重要的机器视觉器件,它能够将被采集的图像信息通过电路转换成电信号,再通过模数转换器(ADC)将其转化为数字信号,最后以标准的视频信号输出。工业相机在机器视觉领域得到了广泛应用,包括质量控制、工业检测、医疗诊断、安全监控以及交通管理等诸多领域。
 51camera机器视觉产品资料查询平台
51camera机器视觉产品资料查询平台机器视觉是通过光学装置和非接触传感器自动地接收和处理一个真实物体的图像,以获得所需信息或用于控制机器人运动的装置。简单来说,机器视觉是用机器代替人眼来做测量和判断,它依赖于一系列设备和技术,其中工业相机是核心组件之一。
一、定义及原理
工业相机,也被称为摄像机,是机器视觉系统中的一个关键组件,其最本质的功能就是将光信号转变成有序的电信号。机器视觉系统通过图像摄取装置(即工业相机)将被摄目标转化为图像信号,这些信号被传送到专用的图像处理系统。系统根据像素分布、亮度、颜色等信息,将这些信号转化为数字化信号,并进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
二、分类
1. 按照芯片结构分类:CCD相机 & CMOS相机。
2. 按照传感器结构分:面阵相机 & 线阵相机。
3. 按照输出模式分类:模拟相机 & 数字相机。
4. 按照输出色彩分:彩色相机&黑白相机。
工业相机主要基于CCD(电荷耦合器件)或CMOS(互补金属氧化物半导体)芯片。CCD是目前机器视觉中最常用的图像传感器,它集光电转换、电荷存贮、电荷转移和信号读取于一体,是典型的固体成像器件。CMOS图像传感器则将光敏元阵列、图像信号放大器、信号读取电路、模数转换电路、图像信号处理器及控制器集成在一块芯片上。两者在性能和应用方面各有优势:
CMOS相机适用于高速和低功耗应用,成本较低。
CCD相机适用于要求高图像质量和低噪音的应用,成本较高。
面阵相机是每次采集若干行的图像并以帧方式输出。其应用面较广,如面积、形状、尺寸、位置,甚至温度等的测量。面阵相机的优点是可以获取二维图像信息,测量图像直观。缺点是像元总数多,而每行的像元数一般较线阵少,帧速度受到限制。
线阵工业相机,顾名思义是成像传感器呈“线”状的。虽然也是二维图像,但极宽,几千个像素的宽度,而高度却只有几个像素的而已。线阵工业相机具有高扫描频率和高分辨率。其典型应用领域是检测连续的材料,例如金属、塑料、纸和纤维等。被检测的物体通常匀速运动, 利用一台或多台工业相机对其逐行连续扫描,以达到对其整个表面均匀检测。可以对图像逐行进行处理,或者对由多行组成的面阵图像进行处理。另外线阵工业相机非常适合测量场合,这要归功于传感器的高分辨率。一般在两种情况下使用这种相机:
1. 被测视野为细长的带状,多用于滚筒上检测的问题。
2. 需要极大的视野或极高的精度。
数字工业相机和模拟工业相机只在输出信号上有区别。
模拟工业相机输出的是模拟信号,数字工业相机输出的是数字信号。模拟工业相机的A/D 转换是在工业相机之外进行的,数字工业相机的A/D 转换是在工业相机内部完成的。
标准的模拟相机分辨率很低,帧率固定。模拟相机必须搭配具有A/D转换功能的模拟采集卡,经过模拟采集卡转换为数字信号进行存储或者处理。模拟信号可能会由于工厂内其他设备(比如电动机或高压电缆)的电磁干扰而造成失真,随着噪声水平的提高模拟相机的动态范围(原始信号与噪声之比)会降低。动态范围决定了有多少信息能从相机传输给计算机。数字相机输出的是数字信号,数字信号不受电噪声影响,因此数字相机的动态范围更高,能够向计算机传输更精确的信号。
黑白工业相机直接将光强信号转换成图像灰度值,生成的是单色灰度图像。彩色工业相机能获取景物中红、绿、蓝三个分量的光信号,输出彩色图像。彩色相机能够提供比黑白相机更多的色彩信息。
三、常用参数
1.分辨率:指相机能够捕捉图像的像素数量,它影响着图像的细节程度和测量精度。通常面阵相机的分辨率用水平和垂直分辨率两个数字表示,如:1920(H)x 1080(V),前面的数字表示每行的像元数量,即共有1920个像元;后面的数字表示像元的行数,即1080 行。线阵相机的分辨率通常表示多少K,如1K(1024),2K(2048),4K(4096)等。选择时需要根据测量对象的特征和测量精度要求来计算所需的像素数量。
2. 帧率:表示相机每秒捕获的图像数量(FPS),即相机采集和传输图像的速度。通常面阵相机用帧频表示,单位fps(Frame Per Second)。如30fps,表示相机1秒钟内最多能采集30帧图像。线阵相机通常用行频表示,单位KHz,如12KHz,表示相机1秒钟内最多能采集12000行图像数据。高帧率相机适用于快速运动物体的捕捉和分析。
3.像素深度:数字相机输出的数字信号,即像元灰度值,具有特殊的比特位数,称为像元深度。对于黑白相机,这个值通常是8-16bit。像元深度定义了灰度由暗道亮的灰阶数。例如,对于8bit的相机0 代表全暗而255 代表全亮。决定了图像的色彩范围和灰度级别。高像素深度相机能提供更丰富的色彩和更精细的灰度变化。
4.像元尺寸:像元的尺寸是每个像素的面积,也就是像元大小。像元尺寸大小和像元数(分辨率)共同决定了相机靶面的大小。
5.精度:检测的精准度,每个像素代表的实际物理尺寸。精度=单方向市场大小/相机单方向分辨率。
6.噪声:感光器件(CMOS/CCD)接收光线信号并输出的过程中所产生的图像中的粗糙部分。工业相机的噪声是指成像过程中不希望被采集到的、实际成像目标外的信号。
7.信噪比:输出信号中有用信号和噪声的比(dB)。
8.数据接口:在机器视觉检测技术中,当前工业相机的数据接口主要有GigE、USB3.0、CoaXPress、Cameralink、HSLink、10GigE,还有退居二线的IEEE 1394、USB2.0、LVDS、RS422、SDI等。 1)GigE:带宽可达到1000 Mbps,不需中继器最远可传输100米。 2)Cameralink:支持速率达2.3Gb/s。 3)USB3.0:最大信号传输速率可达5 Gbits/s。实际传输速率可达到 +350MB/s。 4)CoaXPress:一种非对称的高速串行通信数字标准,一根电缆最高传输率可达 6.25Gb/s,传输距离可达100米。 5)HSLink:最大带宽可达6000MB/s,支持即插即用。 6)10GigE:俗称万兆网,带宽可达到10000 Mbps,最远可传输100米。
9.动态范围:动态范围表明相机探测光信号的范围。对于固定相机,其动态范围是一个定值,不随外界条件变化而变化。在线性响应曲线上,相机的动态范围定义为饱和曝光量与噪声等效曝光量的比值,即动态范围=光敏元的满阱容量/等效噪声信号动态范围,可用倍数、dB 或Bit 等方式来表示。动态范围大,相机对不同的光照强度有更强的适应能力。
10.光谱响应性:工业相机的光谱响应特性是指该感光芯片对不同光波的敏感特性,一般响应范围是350nm-1000nm,一些相机在感光芯片前加了一个滤镜,滤除红外光线,如果系统需要对红外感光时可去掉该滤镜。
11.快门方式:工业相机有全局快门和卷帘快门。
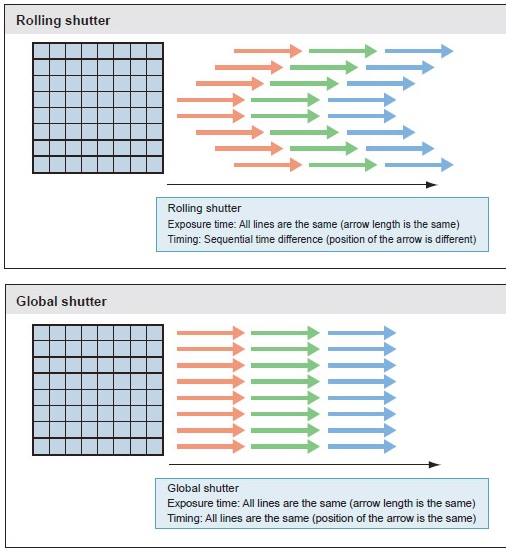
12.全局快门与卷帘快门的优缺点: ①全局快门的优点是所有的像素点同时曝光,其缺点是曝光时间存在物理极限; ②卷帘快门的优点是具有更小的曝光时间,其缺点是由于是逐行而不是同时曝光取像,如果图像是运动的,则存在明显的拖影,因此不适合拍摄运动的物体。 曝光时间短的应用(如<500μs)适合使用全局快门,而曝光时间长的应用,选择卷帘快门可以有更低的噪声和帧速。在实际应用中,一般只要是拍摄运动物体,都使用全局快门,只有在拍摄静止物体时,才使用滚动快门。CCD和CMOS相机都可配备全局快门。
四、选型要点
工业相机选型时要注意以下几点:
1. 分辨率的选择。首先根据目标物体的精度要求选择分辨率。其次看工业相机的输出,若是用机器软件分析识别,分辨率越高越有帮助;若是需要视频输出至显示器上观察,则依赖于显示器的分辨率,工业相机的分辨率再高,显示器分辨率不够,也是没有意义的;若是需要将图像实时保存下来,还需要综合服务器的存储速率来考虑工业相机的分辨率。
2. 与镜头的匹配。传感器芯片尺寸需要小于或等于镜头的靶面尺寸,C 或CS 安装座也要匹配(或者增加转接口);
3. 相机帧数选择。当被测物体处于运动状态时,要选择帧数高的工业相机。但一般来说分辨率越高,帧数越低。
系统单次运行速度 = 系统成像(包括传输)速度 + 系统检测速度
虽然系统成像(包括传输)速度可以根据工业相机异步触发功能、快门速度等进行理论计算,最好的方法还是通过软件进行实际测试。
如何选择线阵相机?
1. 计算分辨率:幅宽除以检测精度得出每行需要的像素。
2. 检测精度:幅宽除以像素得出实际检测精度。
3. 扫描行数:每秒运动速度长度除以精度得出每秒扫描行数。
根据以上计算结果选择线阵相机举例如下:
如幅宽为1600mm、精度1mm、运动速度22000mm/s
1600/1=1600 像素 最少2000像素,选定为2k 相机
1600/2048=0.8 实际精度
22000mm/0.8mm=27.5KHz
应选定相机为2048 像素28kHz 相机。
选择工业相机时,物体成像的速度必须考虑好。对于静止或移动缓慢的物体,面阵工业相机最适合。在面阵相机曝光时任何的移动会导致图像模糊,此时可通过减小曝光时间或使用闪光灯来解决图像模糊的问题。对于快速移动的物体,保证相机曝光时目标物体的位移小于一个像素所代表的的拍摄精度,即可解决图像模糊的问题。例如,目标物以1cm/s的速度匀速移动,拍摄精度为1mm/pixel,那么可以设置的相机最大曝光时间是0.1秒。
五、工业相机保存方法
1. 尽量避免将工业相机直接指向阳光,以免损害摄像头的图像感应器件;
2. 避免将工业相机和油、蒸汽、水汽、湿气和灰尘等物质接触,避免和水直接接触;
3. 不要使用刺激的清洁剂或者有机溶剂擦拭工业相机;
4. 不要拉扯和扭转连接线;
5. 非必要情况下,自己不要随意拆卸相机,试图碰触其内部零件,这容易对相机造成损伤,人为损伤经销商是不保修的;
6. 存储时,应当将相机存放到干净、干燥的地方。
六、配套软件
不同品牌的工业相机匹配的软件不一样, 机器视觉产品资料查询平台收录众多工业相机、工业镜头等视觉器件。可以直接在该平台输入相机型号,即可查看相关型号资料及软件。
七、应用领域
工业相机广泛用于各种应用领域,包括自动化生产线上的质量控制、机器视觉系统、医疗成像、物流和仓储、安全监控、交通监控和航空等。它们在这些领域中用于实时监测、数据收集、图像处理和自动决策,有助于提高生产效率、降低成本和提高质量。
八、发展趋势
技术创新:随着人工智能和深度学习技术的发展,工业相机将具备更强大的图像处理和分析能力,实现更高级别的自动化和智能化。
集成化与模块化:未来的工业相机将更加集成化和模块化,方便用户根据实际需求进行灵活配置和扩展。
高性价比:随着技术的不断进步和市场竞争的加剧,工业相机的性价比将不断提高,为更多行业和应用领域提供优质的视觉解决方案。
综上所述,工业相机作为机器视觉系统的核心组件之一,在自动化、智能化和数字化转型中发挥着至关重要的作用。随着技术的不断进步和应用领域的不断拓展,工业相机将迎来更加广阔的发展前景。
51camera机器视觉产品资料查询平台。
-
机器视觉
+关注
关注
161文章
4363浏览量
120254 -
工业相机
+关注
关注
5文章
320浏览量
23621
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论