 MS1205N——激光测距用高精度时间测量(TDC)电路
MS1205N——激光测距用高精度时间测量(TDC)电路
产品简述
MS1205N 是一款高精度时间测量(TDC)电路,具有四通
道、多脉冲的采样能力、高速 SPI 通讯、多种测量模式,适合
于激光雷达和激光测距。
主要特点
◼ 单精度模式 60ps
◼ 双精度模式 30ps
◼ 非校准测量范围 3.5ns(0ns)至 25μs
◼ 单精度校准测量范围 3.5ns(0ns)至 16μs
◼ 双精度校准测量范围 3.5ns(0ns)至 4μs
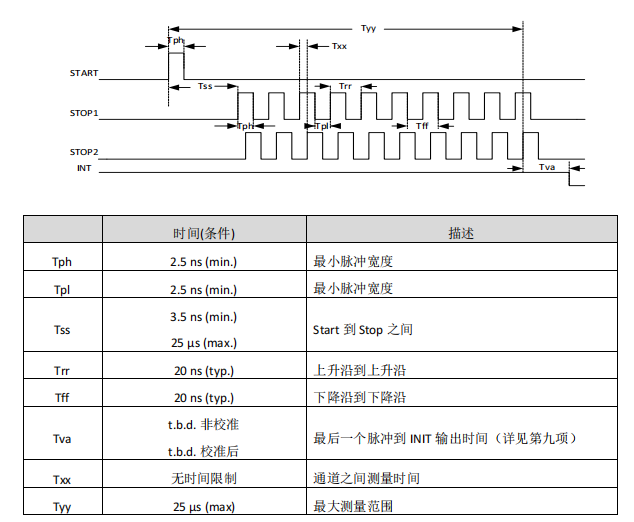
◼ 20ns 最小脉冲间隔,四通道最多可接收 40 个脉冲
◼ 4 线 SPI 通信接口
◼ 工作电压 2.5V 至 3.6V
◼ 工作温度-40°C 至+125°C
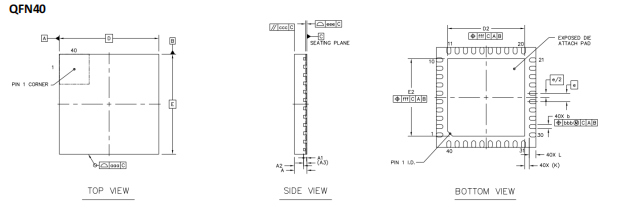
◼ QFN40 封装
应用
◼ 激光雷达
◼ 激光测距
◼ 脉冲测量
产品规格分类

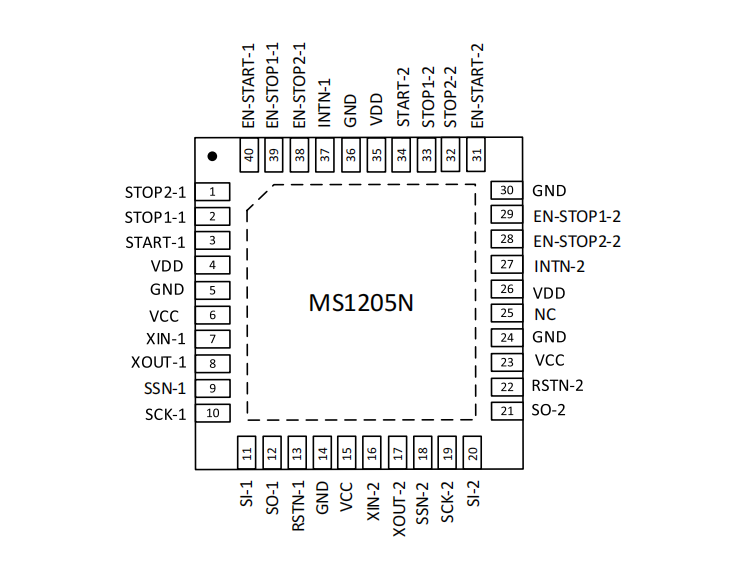
管脚图
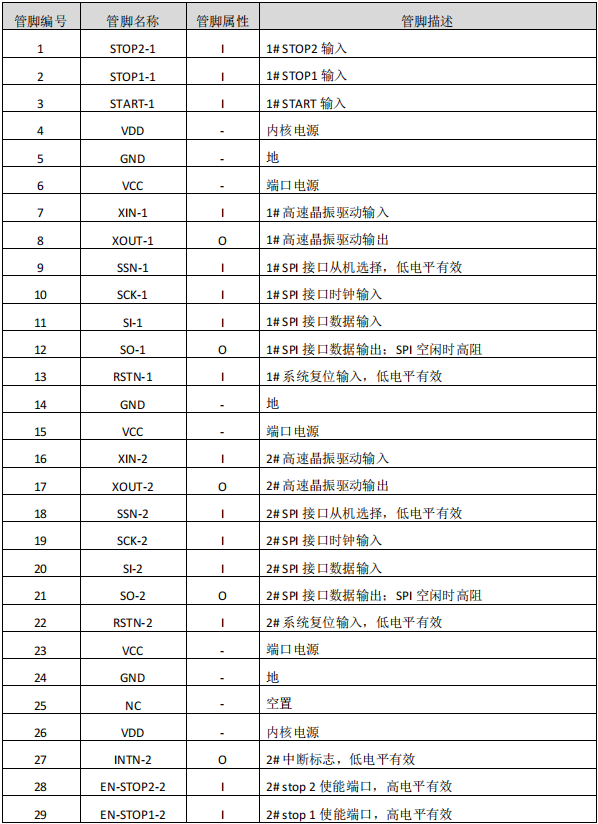
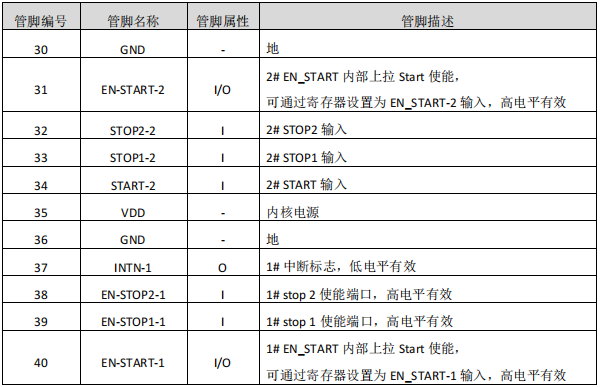
管脚说明
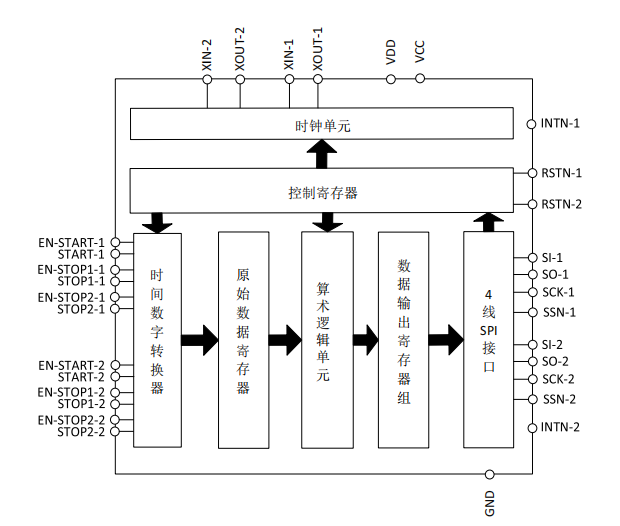
内部框图
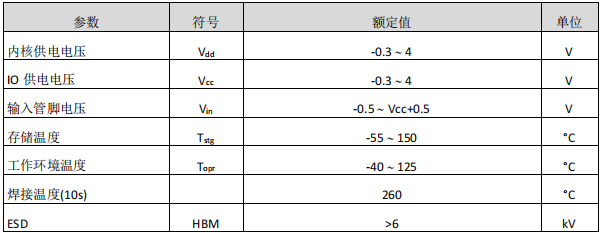
极限参数
芯片使用中,任何超过极限参数的应用方式会对器件造成永久的损坏,芯片长时间处于极限工作
状态可能会影响器件的可靠性。极限参数只是由一系列极端测试得出,并不代表芯片可以正常工作在
此极限条件下。
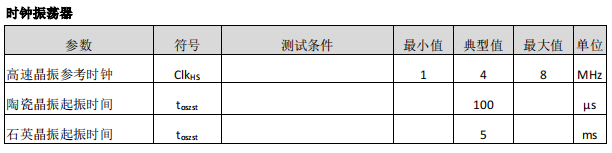
推荐工作条件
没有特别规定,环境温度为 Ta = 25°C ±2°C 。
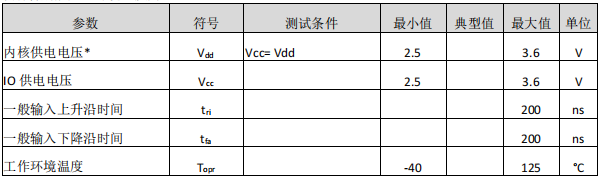
*包括晶振管脚 XIN, XOUT
电气参数
直流特性
Vcc = Vdd = 3.0 V, Tj = -40 到 +85°C。
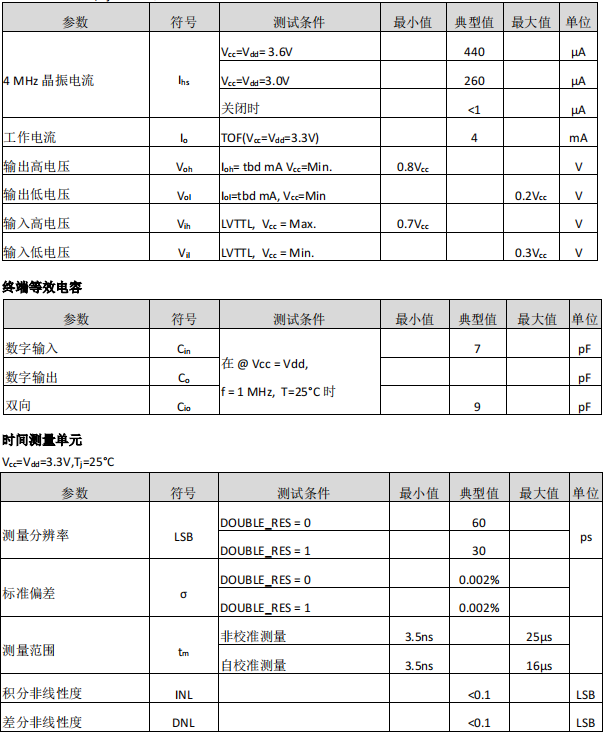
如有需求请联系——三亚微科技 王子文(16620966594)
功能描述
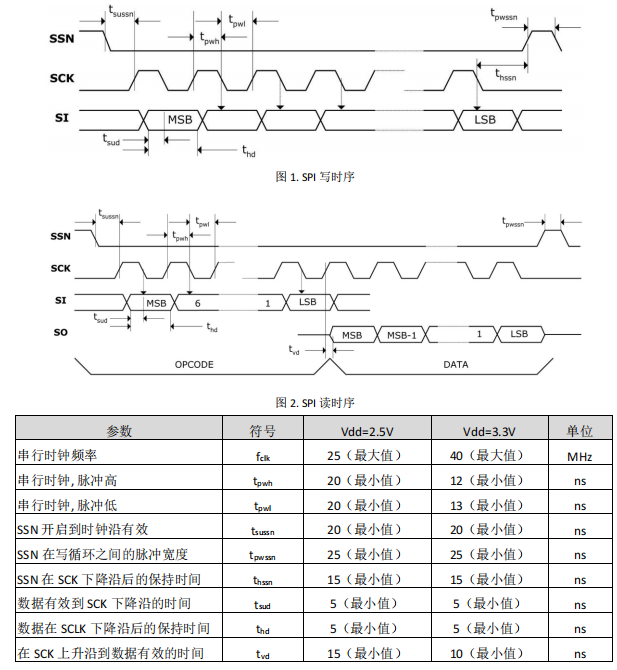
1. SPI接口
MS1205N 有 2 个 SPI 接口,分别控制 1# 和 2#,SPI 接口是与 4 线制 SPI 兼容的,它需要一个 Serial
Select Not(SSN)信号,因此不能工作在 3-线制 SPI 接口。
SSN 的下降沿或者第一个 SCK 的上升沿将会复位 INTN 管脚(中断管脚)状态。
从最高位(MSB)开始传输,以最低位(LSB)结束。传输是以字节方式完成的。通过给 SSN 发送一个
LOW-HIGH-LOW 的电平,数据传输可以在每个字节后停止。
4. 电源电压
为了达到最佳测量效果,好的电源非常重要。电源应该具有高电容性和低电感性。MS1205N 提供
两对电源供应端口:VCC - I/O 供电电压 ,VDD - 内核供电电压。
所有的 Ground 引脚都应该连接到印刷电路板的地层上。 VCC 和 VDD 应该通过一个电池或者固定
的线性电压调节器给出。不要应用开关式的调节器,避免由于 IO 电压引起的干扰。
时间数字转换器能够有好的测量效果,完全取决于好的电源供电。芯片测量主要是脉冲式的电
流,因此双通滤波非常重要:VCC 47 µF(最小 22 µF),VDD 100 µF(最小 22 µF)。
电压应该通过一个模拟的调节器给出,推荐不要使用开关式的电压调节。
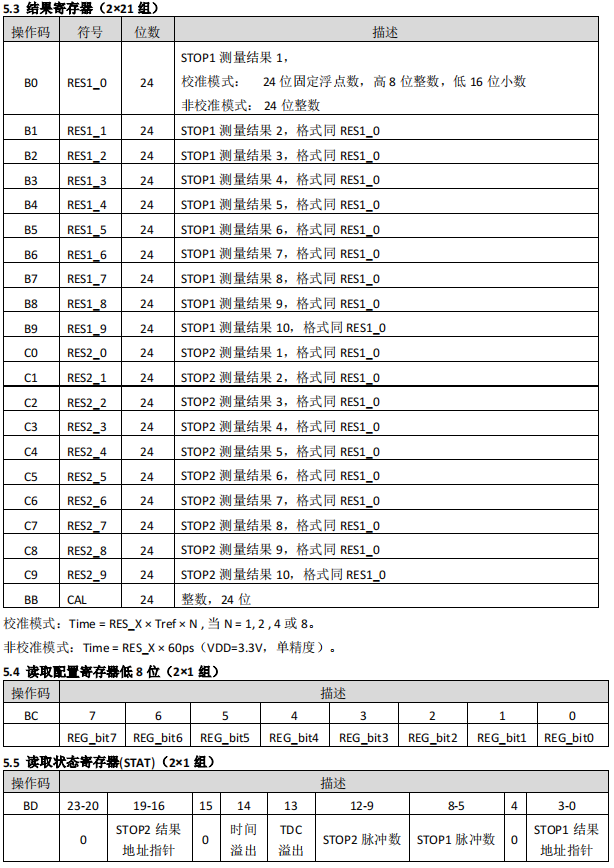
5. 操作码及寄存器
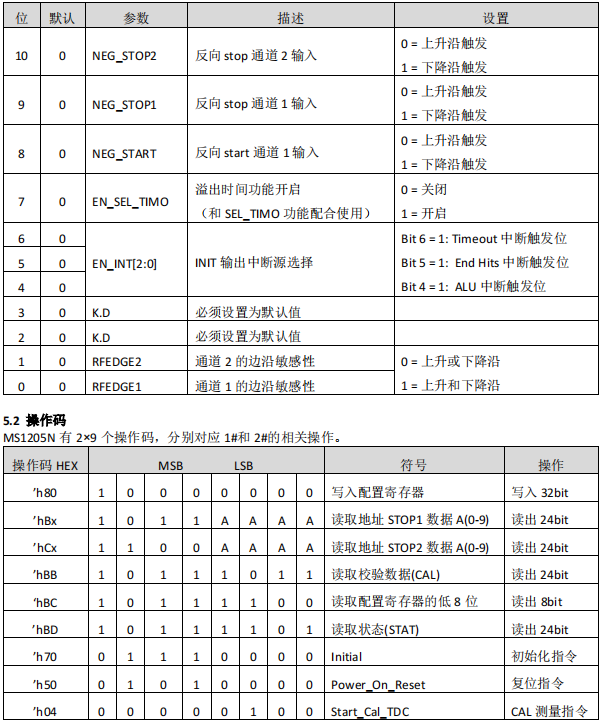
5.1 配置寄存器
MS1205N 有 2×1 组 32 位的配置寄存器,分别对应 1#和 2#的寄存器设置。
如有需求请联系——三亚微科技 王子文(16620966594)
6. 时间测量
6.1. 概述
非校准模式测量范围,从 3.5ns 到 25μs(0-25μs 在两个 stop 通道之间测量)。
校准模式单精度测量范围,从 3.5ns 到 16μs(0-16μs 在两个 stop 通道之间测量)。
校准模式双精度测量范围,从 3.5ns 到 4μs(0-4μs 在两个 stop 通道之间测量)。
单精度模式典型精度为 60ps,2 个 stop 通道相对于 start 通道。
双精度模式典型精度为 30ps,仅 stop1 通道相对应 start 通道。
内置特殊防抖技术,使测量时间高度精准。
20ns 的脉冲之间最小间隔。
四个 stop 通道可同时采集,且每个 stop 通道最多 10 个脉冲。
每个 stop 通道可选择上升或下降沿捕获,或者选择上升和下降沿同时捕获。
自动测量 START 和 STOP 脉冲之间的时间间隔,无需再进行寄存器设置。
可任意设置溢出时间,从而减少高速测量时溢出时间等待。
在非校准模式下,可以任意测量比预期脉冲数少的脉冲。
典型应用: 激光测距、激光雷达、脉冲测量。
6.2. 高精度时间测量原理
数字式 TDC 运用内部的逻辑门延时来进行高精度的时间间隔的测量,下图阐述了这种绝对时间
TDC 的测量原理结构。该电路结构确保电路通过特殊的测量方法,使信号通过逻辑门的时间可以非常
精确。最高的测量精度完全取决于内部通过逻辑门的传播时间。
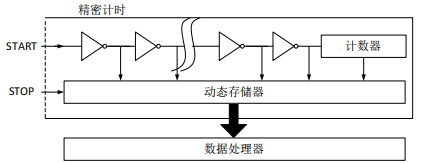
时间测量是通过一个 start 信号触发,经过内部防抖处理后,TDC 的门电路开始高速计数,直到
stop 信号产生记录计数结果,达到 STOP 预期脉冲数后停止计数。
3.3V 和 25°C 时,MS1205N 的单精度最小分辨率是 60ps。温度和电压对门电路的传播延时时间有
很大的影响。通常是通过校准来补偿由温度和电压变化而引起的误差。在校准过程中,TDC 测量 0.5
个和 1.5 个时钟周期,相减后得一个时钟周期的 TDC 计数结果,即为校准值。测量范围受计数器大小
的限制,以下是非校准模式下的最大测量范围:tyy = 60 ps x 442368 ≈ 25 µs。
每一个输入端均可以被单独设置成上升沿、下降沿或上下沿同时触发有效。可通过设置寄存器的
bit8-10 位(EG_START,NEG_STOP1,NEG_STOP2)和寄存器的 bit0-1 位(REFDGEx) 来选择触发沿。
时间测量结束后,MS1205N 会自动将各个脉冲的测量结果顺序写到相应的结果寄存器,无需再进
行寄存器操作设置。在计算结果的过程中,先计算 STOP1 通道的脉冲,然后计算 STOP2 通道的脉冲,
所以当使用单通道时,必须使用 STOP1。
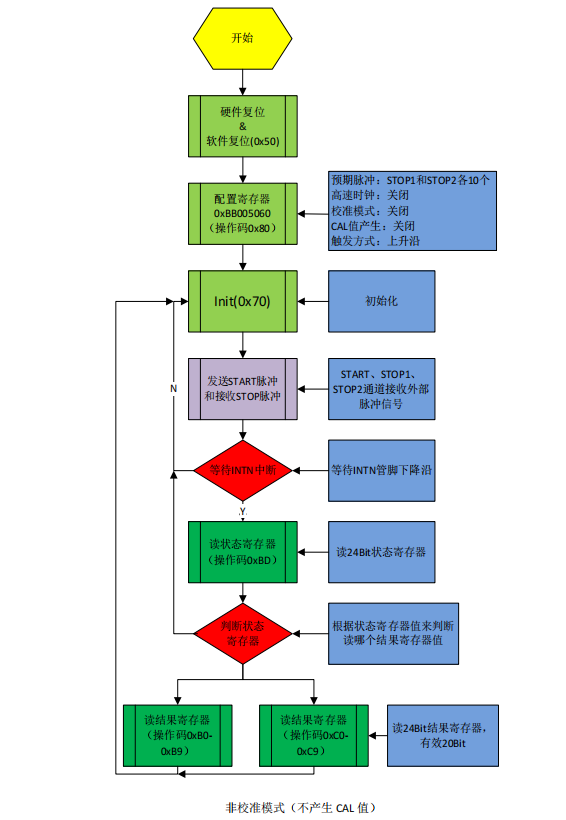
6.3. 非校准时间测量
6.3.1 非校准时间测量概述
非校准时间测量,实际上就是应用数字式 TDC 内部的逻辑门延时来实现高精度时间测量,非校准
模式下的最大测量范围是 3.5ns-25μs。单精度模式下,可以同时测量两个 STOP 通道,且每个通道最多
可以测量 10 个 STOP 脉冲。双精度模式下,仅可以使用 STOP1 通道。
非校准时间测量过程中,无需高速时钟参与,所以可以通过寄存器设置来关闭高速时钟
(START_CLKHS=0)。在该模式下,测量速度最快,结果寄存器直接输出门延时个数。在非校准模式下,
结果寄存器有效位为 20 位,测量时间计算如下,该测量时间受温度和电压影响。
测量时间=RES_X × 60ps (DOUBLE_RES=0)
测量时间=RES_X × 30ps (DOUBLE_RES=1)
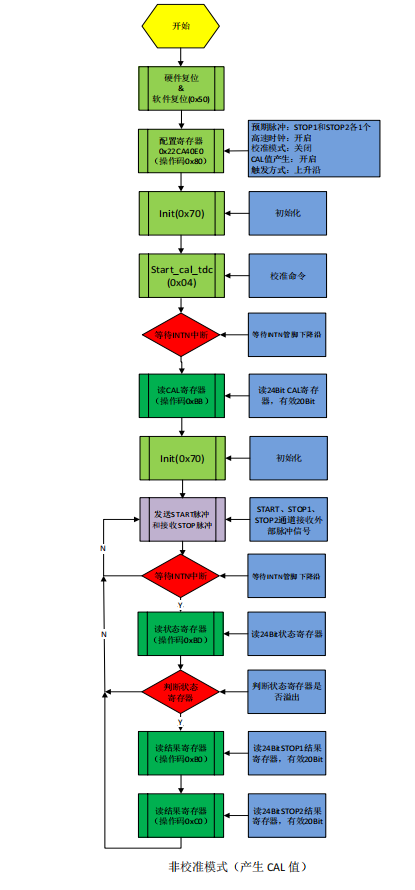
非校准模式下也可以实现时间测量和 CAL 值的同时测量,在该模式下,需要开启高速时钟
(START_CLKHS=1)和开启自动校准(NO_CAL_AUTO=0),这样就会在测量时间的同时,产生一个 Tref× N 周
期的门延时个数,然后将 CAL 值 RES_Tref 存在指定的结果寄存器中。测量时间如下计算,该测量时间
和温度和电压无关,仅和高速时钟抖动有关。
测量时间=RES_X/RES_Tref×Tref× N, N = 1,2,4,8
非校准模式测量溢出,当溢出时间功能关闭(EN_SEL_TIMO=0)的情况下,溢出时间相当于 TDC 溢
出,也就是要 25μs 后产生溢出,并且状态寄存器 Bit13=1(TDC 溢出);当溢出时间功能开启
(EN_SEL_TIMO=1)的情况下,溢出时间由溢出时间选择(SEL_TIMO)进行设置,溢出时间仅和高速时钟相
关,不受时钟分频(DIV_CLKHS)的影响。例如,高速时钟为 8MHz,SEL_TIMO=0 的情况下,溢出时间为
125ns,溢出时状态寄存器 Bit14=1(时间溢出)。
非校准模式下,当测量脉冲个数小于预期脉冲个数时,可以正常输出测量脉冲的值,虽然这时状
态寄存器溢出,但测量到的脉冲的产生的结果是正确的,这种应用可以解决在测距过程中多个不定目
标的问题。
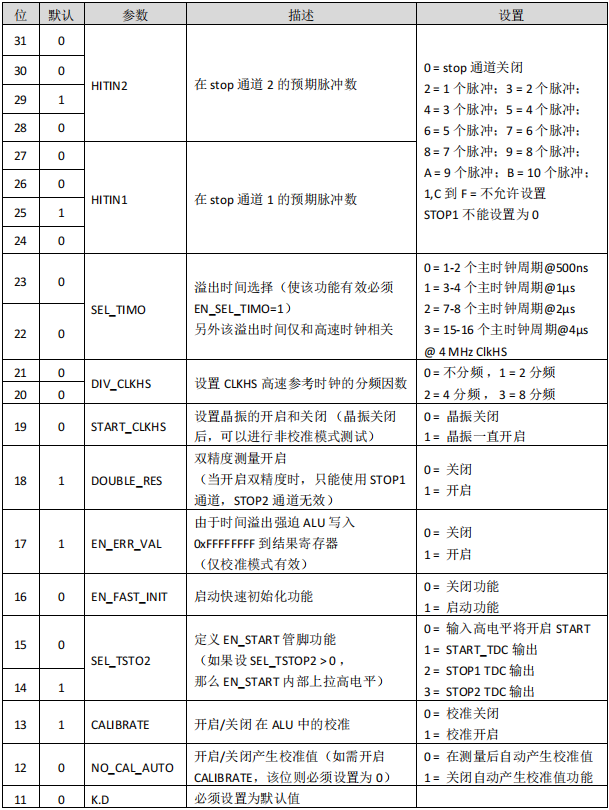
6.3.2 寄存器设置
主要的设置为:
(1)选择测量预期脉冲个数
寄存器 bit 31-28 设置 STOP2 预期脉冲个数 HITIN2=0 或者 2-B;
寄存器 bit 27-24 设置 STOP1 预期脉冲个数 HITIN1=2-B,不能设置为 0;否则无法开启测量。
(2)选择测量精度
寄存器 bit 18, DOUBLE_RES = 1 选择双精度模式,测量精度为典型 30ps,但仅有一个 stop 通道
可用。DOUBLE_RES = 0 选择单精度模式,测量精度为典型 60ps,这时两个 stop 通道都可用。
(3)校准选择
在非校准模式下,校准将关闭,寄存器 bit 13 CALIBRATE=0;
(4)产生 CAL 值
在非校准模式下,可以选择产生 CAL 值和不产生 CAL 值,寄存器 bit 12 NO_CAL_AUTO=0 时,产
生 CAL 值,NO_CAL_AUTO=1 时,不产生 CAL 值。
(5)溢出选择
在非校准模式下,寄存器 bit 7 EN_SEL_TIMO=0 溢出时间关闭,这时,溢出时间为 TDC 溢出。当
EN_SEL_TIMO=1 时,开启溢出时间,且溢出时间和寄存器 bit 23-22 SEL_TIMO 设置有关。
(6)选择输入触发方式
可通过设置寄存器的 Bit 8-10(NEG_X),在每一个输入端口(Start,Stop1,Stop2)选择边沿触发方式。
当 RFEDGE=0 时,NEG_X=0 则上升沿触发,NEG_X=1 则下降沿触发。还可以通过设置寄存器的
Bit0&1(REFDGE1 & FEDGE2),选择 STOP 是由上升沿或下降沿单独触发(RFEDGE=0),还是上升沿和下
降沿同时触发(RFEDGE=1)。当 RFEDGE=1 时,Bit 9-10 选择无效。
(7)中断
中断引脚 INTN 可以有不同的中断源,在寄存器的 Bits4-6(EN_INT)中进行选择,非校准模式选择
bit 6 = 1 和 bit 5= 1;
Reg bit 4 = 1 ALU 已经准备好
Reg bit 5 = 1 预期脉冲个数全部被接收到
Reg bit 6 = 1 测量时间溢出
6.3.3 测量流程
6.4 校准时间测量
注:校准测量单精度最大测量范围 16μs,双精度最大测量范围 4μs。
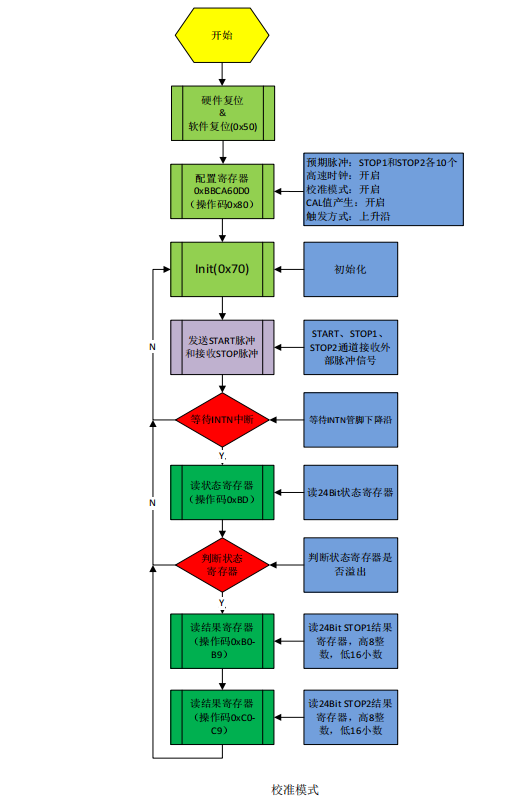
6.4.1 校准时间测量概述
在高速振荡器开启情况下进行校准时间测量,测量的门延时数量和 Tref 门延时数量通过 ALU 进行
计算并输出到结果寄存器。输出的结果为 24 位浮点数,高 8 位为整数位,低 16 位为小数位。校准模
式下的最大测量范围是 3.5ns-16μs,单精度模式下,可以同时测量两个 STOP 通道,且每个通道最多可
以测量 10 个 STOP 脉冲,双精度模式下,仅可以使用 STOP1 通道。
校准时间测量过程中,需要开启高速时钟(START_CLKHS=1)和校准开启(CALIBRATE=1)。当产生校准
值关闭(NO_CAL_AUTOCALIBRATE=1),结果寄存器输出非校准值(可参考非校准部分介绍)。当产生校
准值开启(NO_CAL_AUTOCALIBRATE=0)时,结果寄存器输出校准后的值 RES_X,测量时间如下计算,被
测时差不能超过 2 ×Tref× DIV_CLKHS。
测量时间= RES_X × Tref × N, N = 1, 2,4,8;
在校准时间测量中,必须开启溢出时间功能(EN_SEL_TIMO=1),溢出时间由溢出时间选择
(SEL_TIMO)进行选择,这里的时间仅和高速时钟相关,不受时钟分频(DIV_CLKHS)的影响。例如,高速
时钟为 8MHz,SEL_TIMO=0 的情况下,溢出时间为 250ns,这时状态寄存器 Bit14=1(时间溢出)。
校准模式下,测量脉冲个数必须大于或者等于预期脉冲个数。当测量脉冲小于预期脉冲个数时,
ALU 不进行计算,这时,状态寄存器 Bit14=1(时间溢出),且 EN_ERR_VAL=1 的情况下,结果寄存器
0 输出全 F。
6.4.2 寄存器设置
主要的设置为:
(1)选择测量预期脉冲个数
寄存器 bit 31-28 设置 STOP2 预期脉冲个数 HITIN2=0 或者 2-B;
寄存器 bit 27-24 设置 STOP1 预期脉冲个数 HITIN1=2-B,不能设置为 0,否则无法开启测量。
(2)选择测量精度
寄存器 bit 18, DOUBLE_RES = 1 选择双精度模式,测量精度为典型 30ps,但仅有一个 stop 通道
可用。DOUBLE_RES = 0 选择单精度模式,测量精度为典型 60ps,这时两个 stop 通道都可用。
(3)校准选择
在校准模式下,高速晶振和校准都必须开启,寄存器 bit 13 CALIBRATE=1 和 bit 19 START_CLKHS=1
(4)产生 CAL 值
在校准模式下,必须选择产生 CAL 值,寄存器 bit 12 NO_CAL_AUTO=0 时,产生 CAL 值。
(5)溢出选择
在校准模式下,必须开启溢出,寄存器 bit 7 EN_SEL_TIMO=1 开启溢出时间,且溢出时间和寄存
器 bit 23-22 SEL_TIMO 设置有关。
(6)选择输入触发方式
可通过设置寄存器的 Bit 8-10(NEG_X),在每一个输入端口(Start,Stop1,Stop2)选择边沿触发方式。
当 RFEDGE = 0 时,NEG_X = 0 则上升沿触发,NEG_X = 1 则下降沿触发。还可以通过设置寄存器的
Bit0&1(REFDGE1 & FEDGE2),可以选择 STOP 下降沿单独触发(RFEDGE=0),还是上升沿和下降沿同时
触发(RFEDGE=1)。当 RFEDGE=1 时,Bit 9-10 选择无效。
(7)中断
中断引脚 INT 可以有不同的中断源,在寄存器的 Bits4-6(EN_INT)中进行选择。由于 Reg bit 5=1 中
断输出最早,Reg bit 4=1 输出最晚,用户可以根据实际情况进行选择。
Reg bit 4 = 1 ALU 已经准备好
Reg bit 5 = 1 预期脉冲个数全部被接收到
Reg bit 6 = 1 测量时间溢出&TDC 溢出
(8)高速时钟分频
由于校准测量时间小于 2 ×Tref× DIV_CLKHS(Tref 只与外接高速晶振相关,如外接 4M,则 Tref =
250ns),所以如果需要增长测量时间,则需要设置高速时钟分频,在寄存器的 Bits20-21(DIV_CLKHS)
中进行设置,但 2 ×Tref× DIV_CLKHS 不能超出测量范围的最大值 16μs。
6.4.3 测量流程
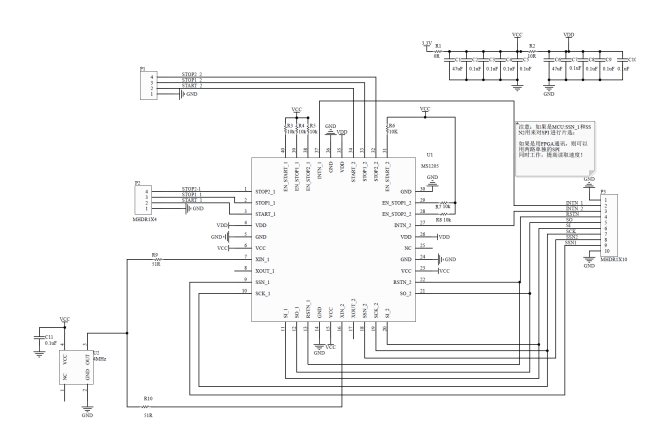
典型应用图
封装外形图
审核编辑 黄宇
——爱研究芯片的小王
-
激光测距
+关注
关注
9文章
165浏览量
27801 -
TDC
+关注
关注
0文章
39浏览量
13860 -
时间测量
+关注
关注
0文章
11浏览量
6380
发布评论请先 登录
相关推荐
瑞盟超声波TOF测量技术解决方案
浅谈瑞盟科技·MS1030——超声波流量高精度测量电路
行业知识 | CMOS激光位移传感器如何实现高精度测量?

使用TDC去测量pwm两个波形相位延时时间,如何去设计TDC7201的外围电路?
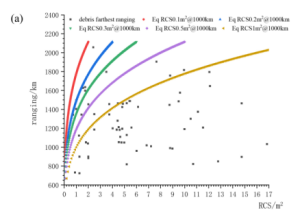
利用瓦级皮秒激光器实现高精度空间碎片观测
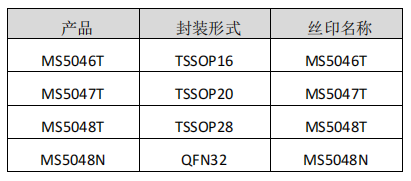
MS5046T/5047T/5048T/5048N——2kSPS、16bit Σ-Δ ADC
TDC芯片数据手册及官方参考例程
MS1022——高精度时间测量(TDC)电路

激光测距传感器的安装方式有哪些
TDC7201适用于激光雷达、测距仪和ADAS中飞行时间应用的时间-数字转换器数据表







 工商网监
工商网监
评论