 密歇根州立大学:研发抗疲劳力致变色水凝胶新型触觉传感器
密歇根州立大学:研发抗疲劳力致变色水凝胶新型触觉传感器

在现代机器人技术中,如何感知和操控柔软、易碎的物体(如生物组织、易碎食物及柔性电子器件)一直是一个巨大挑战。现有的基于视觉的触觉机器人主要集中在刚性物体的感知与操作,但在应对柔软或脆弱物体时,往往难以实现精确判断与解析。近日,密歇根州立(MSU)林少挺研究团队在《Advanced Materials》上发表了一篇题为《Fatigue-Resistant Mechanoresponsive Color-Changing Hydrogels for Vision-Based Tactile Robots》的文章,创新性地利用了具有优越抗疲劳特性的力致变色水凝胶,设计了一种低成本、寿命长的基于视觉的触觉传感器。该传感器能够将接触表面的应力直接转化为可识别的图像,从而感知材料硬度、物体形状、空间位置及施加的压力。这一突破有望填补机器人触觉感知与人类触觉感知之间的根本差距,推动触觉机器人技术迈向新高度。密歇根州立大学林少挺教授为通讯作者,博士生刘佳斌为文章的第一作者。文章的其他作者包括普渡大学Yu She教授和石溪大学Wei Li教授。
如图一所示,抗疲劳力致变色水凝胶(FMCH)由高缠结的聚合物网络和适量的吸湿盐组成,能够在偏振光下呈现出可逆、稳定且可预测的颜色变化。FMCH展现出优越的机械性能,其拉伸性达到原长的6倍,断裂韧性高达3,000 J/m²,疲劳阈值可达400 J/m²。更为重要的是,它在多达10,000次的循环拉伸下,性能稳定,并且在应变速率范围为0.02 s⁻¹至0.35 s⁻¹的范围内,力致变色性能始终稳定。这种具有优越抗疲劳特性且对应变率不敏感的力致变色软材料,非常适合用于需要长期承受动态负载的触觉传感领域。
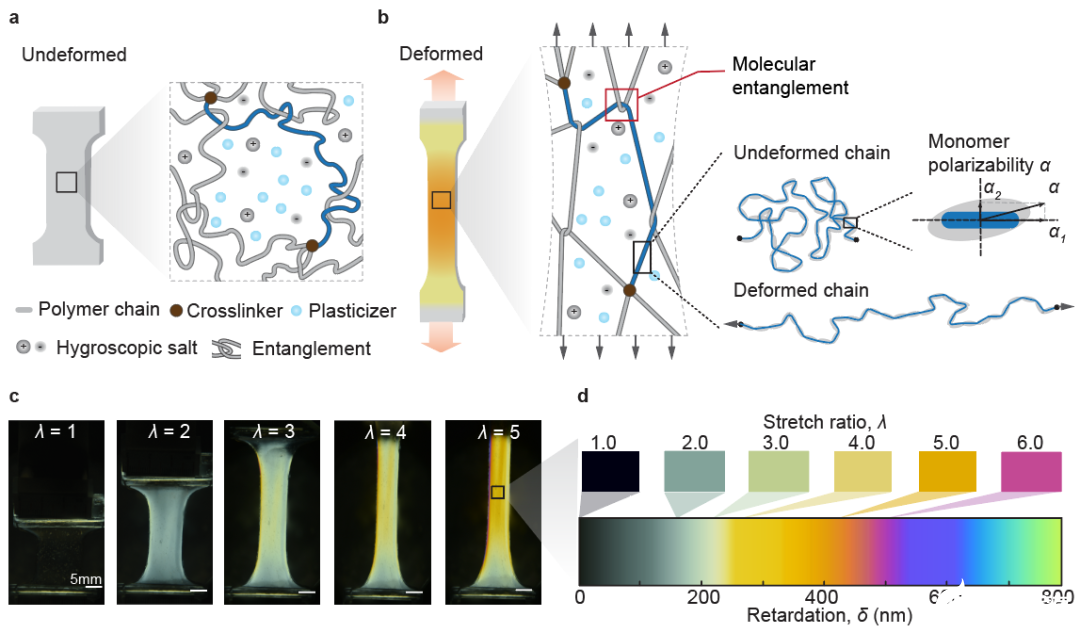
图1. 抗疲劳力致变色水凝胶的分子设计
如图二所示,基于力致变色水凝胶的触觉传感器采用反射光弹性原理,通过一种不透明、应变不敏感且对波长不敏感的可拉伸反射膜,进而实现将相机和光源安置在同一侧,从而精准采集接触表面的应力图像。该传感器设计紧凑,尺寸灵活可调,并且能够轻松集成到各种机器人系统中。通过对不同几何形状、机械模量以及放置角度的物体进行压痕测试,传感器采集到的图像能够轻松区分物体的几何形状、空间位置、施加的压力以及材料的软硬度。与ABAQUS仿真结果对比显示,传感器采集的图像无需复杂数据处理,便能反映接触面的应力分布。该触觉传感器不仅结构简单、成本低廉,且采集的图像包含丰富的应力信息。这种基于视觉的触觉传感器,融合了软材料设计、光学系统工程和触觉机器人技术所构建的多学科优势,为突破现有机器人感知与操作能力极限提供了基础工具,是下一代触觉传感器的理想选择。
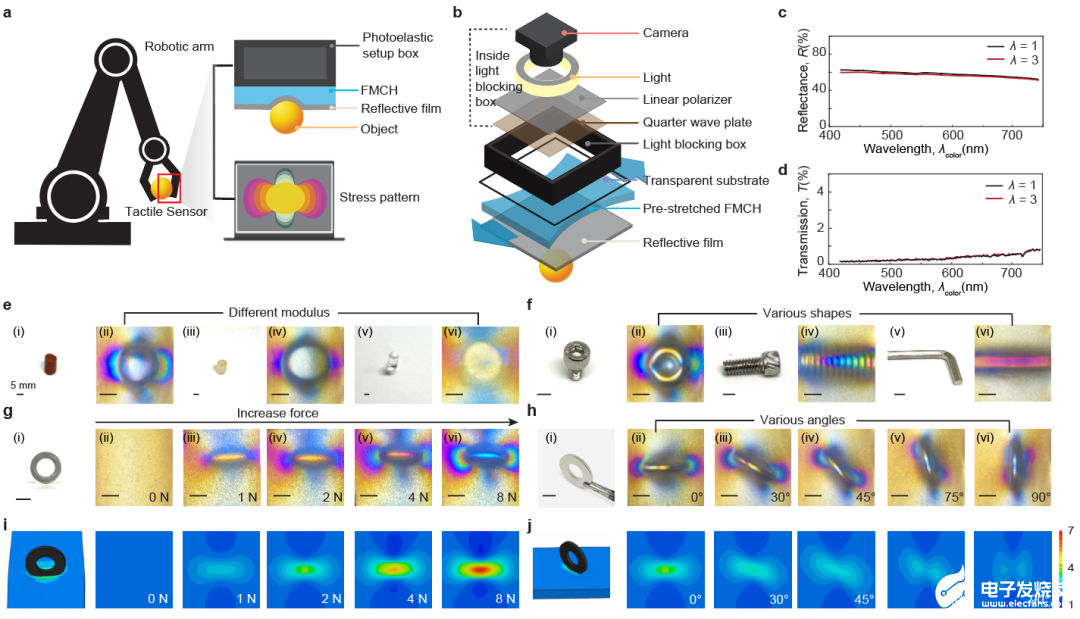
图2. 抗疲劳力致变色水凝胶的分子设计在触觉机器人领域的应用 软材料领域:这项工作揭示了一种基于理论指导的聚合物分子设计新策略,以协调软材料的机械性能和光学特性。 软体机器人领域:这项工作报告了一种全新的基于视觉的触觉机器人,以填补机器人触觉感知与人类触觉感知之间的关键差距。 触觉感知领域:这项工作提供了一种跨学科的基础工具,有助于为触觉感知的生物学机制提供新的科学见解。
来源:高分子材料科学
声明:转载此文是出于传递更多信息之目的,若有来源标注措误或侵犯了您的合法权益,请与我们联系,我们将及时更正、删除,谢谢。
-
触觉传感器
+关注
关注
4文章
131浏览量
10454
发布评论请先 登录
安徽工程大学、西湖大学:仿生触觉传感器新突破,实现高精度跨域目标识别

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
北京理工大学与中国科学院:研究自适应模量压力传感器阵列,赋能无线触觉可视化

西湖大学:研发CMOS兼容压力传感器阵列,实现精准触觉感知功能
深圳大学:研发新型传感器,实现阿摩尔级生物分子精准检测
电压放大器在抗疲劳高压电压电材料研究中的前沿探索

国科温州研究院和南京工业大学:研究机械和肌电双信号水凝胶传感器推动假肢精准操控
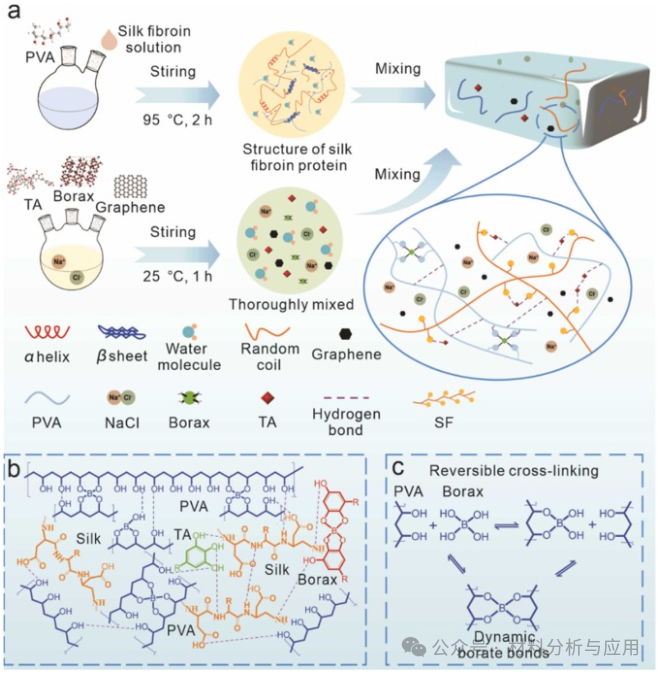
安徽大学:基于聚乙烯醇/丝素蛋白/石墨烯水凝胶的柔性传感器,用于先进的可穿戴电子产品等
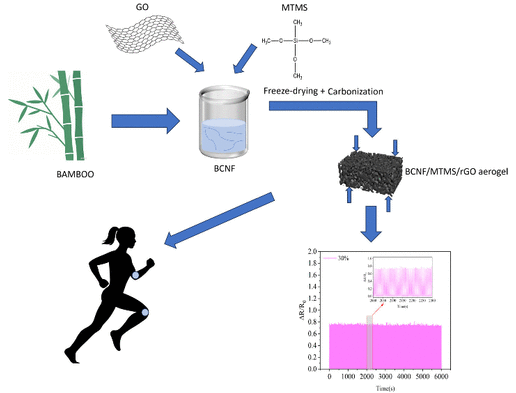
浙江科技大学:研发竹纤维素-石墨烯气凝胶传感器,用于健康监测、柔性可穿戴应用等
国仪电镜助力PANC/T-Fe水凝胶在不同环境温度下的微观结构分析
A股国产力传感器龙头柯力传感投资北京一家触觉传感器公司“他山科技”
从AI眼镜到车窗,电致变色成为显示技术新宠?

Wolfspeed与纽约州立大学理工学院加强教育研究合作
触觉传感器已在亚马逊仓储机械臂率先商用 新增形式有望加速市场增长节奏




评论