 浅谈步进电机控制策略方式有哪些?
浅谈步进电机控制策略方式有哪些?
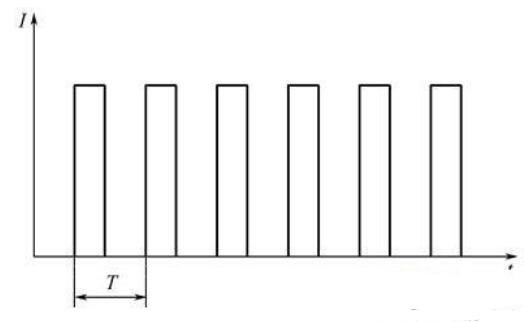
步进电机是一种将电脉冲信号转换为角位移或线位移的电机,广泛应用于各种自动化控制系统中。步进电机的控制策略是实现精确运动控制的关键,以下是一些常见的步进电机控制策略方式:
- 脉冲序列控制 :
- 全步控制 :每个脉冲使电机转动一个步距角,适用于对精度要求不高的场合。
- 半步控制 :每个脉冲使电机转动半个步距角,可以提高分辨率。
- 微步控制 :通过细分步距角,实现更精细的控制,通常需要微步驱动器。
- 方向控制 :
- 步进电机的转动方向由输入脉冲的顺序决定,正序脉冲使电机正转,反序脉冲使电机反转。
- 加减速控制 :
- 恒速控制 :电机在整个运动过程中保持恒定速度。
- 变速控制 :通过改变脉冲频率实现加速和减速,以适应不同的运动需求。
- 电流控制 :
- 恒流控制 :保持电机电流恒定,适用于负载变化不大的场合。
- 恒功率控制 :在不同速度下调整电流,以保持电机的输出功率恒定。
- 位置控制 :
- 速度控制 :
- 通过测量电机的转速并反馈调整,实现对速度的精确控制。
- 力矩控制 :
- 通过测量电机的力矩并反馈调整,实现对力矩的精确控制。
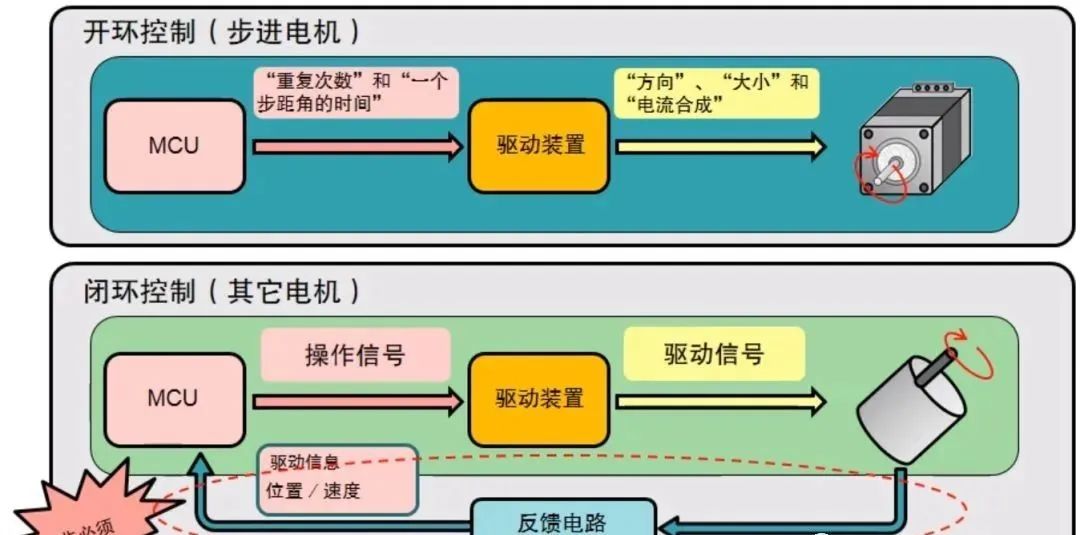
- 开环控制 :
- 不依赖于电机的实际运动状态,只根据输入信号控制电机。
- 闭环控制 :
- 利用传感器反馈电机的实际运动状态,通过控制算法调整输入信号,实现精确控制。
- 混合控制 :
- 结合开环和闭环控制的优点,提高系统的稳定性和响应速度。
- 自适应控制 :
- 根据系统的动态特性和环境变化,自动调整控制参数。
- 模糊控制 :
- 利用模糊逻辑处理不确定性和非线性问题,适用于复杂系统的控制。
- 神经网络控制 :
- 模仿人脑的神经网络结构,通过学习实现对步进电机的控制。
- PID控制 :
- 比例-积分-微分控制,通过调整比例、积分、微分系数实现对电机的精确控制。
- 前馈控制 :
- 根据系统的输入和输出关系,预测未来的输出并进行控制。
- 滑模控制 :
- 通过设计滑模面和控制律,使系统状态在滑模面上滑动,达到控制目的。
- 鲁棒控制 :
- 在面对系统参数变化和外部干扰时,保持系统的稳定性和性能。
- 预测控制 :
- 根据系统的动态模型,预测未来的行为并进行控制。
- 自学习控制 :
- 系统能够根据历史数据自动调整控制策略,以适应新的工作环境。
- 多电机协同控制 :
- 在多电机系统中,通过协调控制实现整体的运动控制。
步进电机的控制策略选择取决于应用的具体需求,如精度、速度、力矩、成本和系统的复杂性。在设计控制系统时,需要综合考虑这些因素,以实现最佳的控制效果。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电流
+关注
关注
40文章
7040浏览量
133283 -
驱动器
+关注
关注
54文章
8425浏览量
147982 -
步进电机
+关注
关注
152文章
3134浏览量
148432 -
自动化控制
+关注
关注
4文章
248浏览量
20633
发布评论请先 登录
相关推荐
双极性步进电机的基本组件有哪些
在如今这个智能时代,步进电机因其特有的开环位置控制性能而被广泛应用。各设备在步进电机转动的过程中,对它输出力矩的平滑性
步进电机控制方式
步进电机受电脉冲信号控制,电脉冲信号的产生、分配、放大全靠电子元器件的动作来实现。由于脉冲控制信号的驱动能力一般都很弱,因此必须有功率放大驱动电路。


步进电机如何自适应控制?步进电机如何细分驱动控制?
是一种智能控制方法,它可以根据系统参数的变化和外部干扰自动调整控制策略,以实现对系统的稳定和精确控制。在步进





 工商网监
工商网监
评论