 深入解析Zephyr RTOS的技术细节
深入解析Zephyr RTOS的技术细节
以下文章来源于嵌入式系统专家之声
作者:Clemens Valens(Elektor) 编译:何灵渊
摘要
Zephyr是一个针对资源受限设备优化的小型、可缩放、多体系架构实时操作系统(RTOS)。Zephyr由Linux基金会维护[1],是一个以构建业界最佳的RTOS为目标的开源合作项目。近年来,Zephyr OS在嵌入式开发中的知名度逐渐增加,新的微控制器和开发板都支持Zephyr。本文将深入讨论Zephyr RTOS的技术细节。
Zephyr有着可缩放性,这让它能够宽泛地适用于资源限制各不相同的多种设备。Zephyr模块化的结构让开发者能够只包括他们需要的组件,从而降低系统尺寸,达到系统的可缩放性。Zephyr在网站上声称可以在内存小到8KB,大到GB的系统上运行。
1. 宽泛的硬件支持
Zephyr支持众多体系结构,包括Arm、x86、RISC-V、Xtensa、MIPS等,并借由Nios2和MicroBlaze软核支持FPGA。本文成文时,Zephyr支持超过600种开发板,包括Arduino UNO R4 Minima、GIGA R1 WiFi和Portenta H7、多种ESP32板、BBC micro:bit的所有版本、树莓派Pico(甚至是树莓派4B+)、nRF51和nRF52板、NXP MIMXRT1010-EVK和其家族,以及STM32 Nucleo和Discovery家族。以上我只列举了在Elektor上常看到的开发板,还有其他许多Zephyr支持的硬件。
除了包含处理器的开发板,Zephyr还支持许多附加板(背板),并包括了各类接口和超过150种传感器的驱动。
作为一款实时操作系统(RTOS),Zephyr提供抢占式多任务调度、任务间通信和实时时钟支持。OS还支持多种网络技术与协议,例如TCP/IP、蓝牙、IEEE 802.15.4(在Zigbee中使用)、MQTT、NFS与LoRaWAN。网络支持加上电源管理功能让Zephyr适合强调能源效率的物联网(IoT)应用和使用电池驱动的设备。
Zephyr中的一组软件库和中间件能够简化常见的任务,像是通信协议、文件系统和设备驱动。
Zephyr还针对安全认证设计,比如ISO 26262,这让它适用于安全关键应用。
3. 受Linux启发
Zephyr并不是Linux,但是它借鉴了Linux的概念、技术和工具。例如Zephyr使用Kconfig配置操作系统,硬件的属性和配置则用设备树规范(Device Tree Specification——DTS)[2]描述。因此,Linux开发者能快速上手Zephyr编程。
4. 开源
Zephyr使用较为宽松的Apache 2.0许可证,允许商业和非商业用途。Zephyr的用户社区提供支持和文档,你也可以加入社区。
5. 尝试Zephyr
我一直都想要尝试Zephyr,但是我对它的第一印象不太好,所以就一直没有深入了解。我之前遇到的主要问题(除了顺利编译源代码以外)是它需要一个能对目标控制器进行编程的连接器,这对于创客不太友好。多亏了Arduino和其引导程序,我们不再需要特别的编程工具。
5.1 选择一个开发板
自从我上次尝试Zephyr以来,其发展日新月异。今天,Zephyr支持超过600种不同的微控制器开发板,你很可能已经拥有几块支持Zephyr的开发板了。阅读详细的支持列表,我发现我已经拥有十几块支持Zephyr的开发板了。
5.2 BBC micro:bit
我尝试了许多块开发板,最后决定在BBC micro:bit上进行实验(见图1,取决于型号,Zephyr使用目标名bbc_microbit或者bbc_microbit_v2)。micro:bit除了很常见以外,它对Zephyr的支持可能是最好的,所有的外设都可以使用,而且有样例代码。最好的是,编程和调试都不需要额外的工具。流行的ESP-WROOM-32(Zephyr目标名esp32_devkitc_wroom)也是个很好的选择,但是调试需要外部工具。

图1:迷你的BBC micro:bit开发板非常适合尝试Zephyr RTOS。谁能想到了为了让儿童学习MakeCode(一门类似Scratch的图形语言)的小板子也适合帮助一位专业嵌入式软件开发者熟悉一款工业级RTOS呢?
Arduino GIGA R1 WiFi也是一个不错的备选方案,但是使用Zephyr的时候会覆写它的引导程序。即使之后你可以手动恢复,这也会添加不需要的副作用。
官方说法是Arduino UNO R4 Minima需要SWD(串行线调试)连接器。许多其他开发板也需要SWD,包括树莓派Pico。但是我发现使用dfu-util(见下文)可以绕过这一要求。和GIGA R1类似,Arduino引导程序会被覆盖。
5.3 使用仿真器
如果你没有合适的开发板,但是还是非常想要尝试Zephyr,Zephyr内建QEMU仿真器支持(只在Linux和macOS上),让你可以虚拟地运行和测试应用。Antmicro的Renode也能达到同样效果,但是我没有亲自尝试。
5.4 安装Zephyr
我在运行Windows 11的计算机上安装了Zephyr,我没有尝试Linux或macOS。在线可以找到详细的安装指南[3],所有步骤都非常清晰,我不需要寻找其他参考资料。按照指南,我使用了虚拟的Python环境,这意味着需要把创建环境的命令记下来,因为每次开始开发时都需要用到。如果你使用Windows PowerShell,可以运行脚本activate.ps1;命令行中则是activate.bat批处理文件。Windows PowerShell处理编译器和链接器输出的表现会更好(图2)。
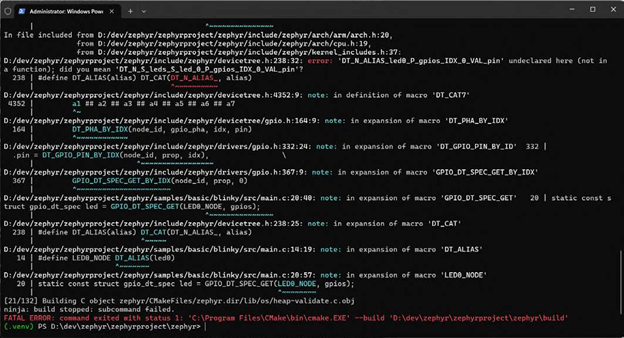
图2:Zephyr的west构建工具是针对命令行终端设计的,Windows的cmd.exe虽然也可以运行,但它不是一个终端。Windows PowerShell是一个终端,更适合运行构建。
Zephyr包括两个部分,OS本身和包含一组MCU工具链的软件开发套件(SDK)。截至本文成文,有21套不同的工具链。
OS和SDK并不需要在同一个位置安装,在我的环境中两个总共需要12GB的存储空间,你可以删除不需要的工具链以节约空间。
安装完成后,让我们测试安装是否成功。通过下面的命令构建一个样例代码,上传到开发板上(将
west build -p always -b
如果你想直接使用上述命令,必须先更改工作路径。运行下面的命令(.venv表示你正在虚拟环境中):
(.venv)
如果样例能成功构建,运行下面的命令将其上传到开发板上:
west flash
板上的“默认”LED会以0.5Hz的速率开始闪烁。
前面已经提到过,烧录可能需要额外的编程工具,像是J-Link适配器,或是另一种JTAG/SWD兼容的编程器(图3)。west程序也必须能够找到驱动程序(即在搜索路径中,对Windows而言是%PATH%),如果不能的话程序会告知你(但是消息经常又长又难以理解)。

图3:在许多情况下(不是全部),你都需要一个JTAG或者SWD编程/调试工具来进行你的Zephyr实验。
在BBC micro:bit V2上,第一次烧录的时候我需要参考标准micro:bit编程步骤将HEX文件手工复制到板上,之后flash命令就可以顺利运行了。可执行的zephyr.hex文件在zephyrprojectzephyruildzephyr路径中。
Arduino板的默认flash命令(UNO R4 Minima和GIGA R1 WiFi)需要将dfu-util编程工具加入到搜索路径中(在启动虚拟环境之前)。这一工具在Arduino IDE中可以找到,但是具体路径取决于你的环境(默认为%HOMEPATH%AppDataLocalArduino15packagesarduino oolsdfu-util<最新的Arduino版本>)。开发板还必须在DFU模式下,按下reset按键两次即可。当LED开始“呼吸”时你就可以烧录程序了。
5.5 闪灯(Blinky)样例的兼容性
你也许注意到了,我建议用Arduino UNO R4 Minima开发板运行闪灯样例,而不是BBC micro:bit,这是因为尽管板上有25个LED(不包括电源指示),它们和闪灯样例并不兼容。ESP-WROOM-32也有类似问题,但是R4 Minima没有。
GIGA R1也与样例兼容,板上的MCU有两个核(Cortex M4和M7),Zephyr允许你在构建命令中使用arduino_giga_r1_m4或者arduino_giga_r1_m7来选择其一。构建和烧录闪灯样例两次,一次M4,一次M7,你就可以发现两个核互为独立。GIGA有RGB LED,闪灯样例在不同核上会使用不同的颜色,M4为蓝色,M7为红色。还可以通过改变闪烁速率(samplesasiclinkysrcmain.c中的SLEEP_TIME_MS)进一步区分两次运行的行为。
5.6 Hello World
对于缺少用于闪烁的LED的开发板而言,下面是在串口输出字符串的hello_world样例:
west build -p always -b
west flash
这一样例在BBC micro:bit和ESP-WROOM-32上都可以运行。要看到输出字符串的话,需要在你的计算机上运行任一串口终端程序。数据率一般为115200(115200,n,8,1)。消息只会输出一次,如果错过了就需要对开发板进行重置(图4)。
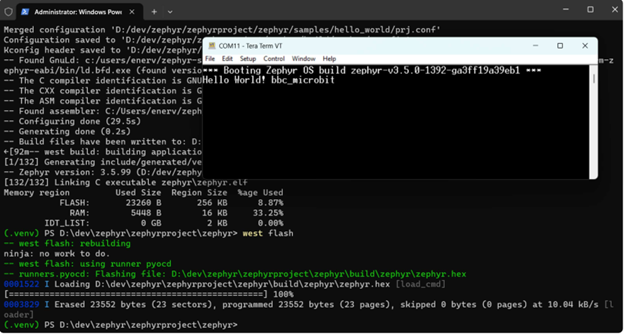
图4:hello_world样例很简短,如果打开串口终端太慢的话就会错过输出。
在R4 Minima和GIGA R1上,串口输出在1号引脚上,而不是使用Arduino IDE时的USB-C端口。这是因为USB端口是MCU的外设,而不在一个单独的芯片上。Zephyr是一个模块化和可扩展的OS,每一个模块和外设都需要被专门启用。在工程的配置文件中可以启用外设,我们在后面会讨论。
对于没有内建串口到USB转换器的开发板,你必须找到串口(MCU上有超过一个端口时,一般为0号端口)并通过外置的串口到USB转换器连接到你的计算机。
6. 进阶实验
如果你已经能够在你的开发板上运行闪灯和hello_world样例,接下来你就可以开始创建你的第一个应用了。如果只有一个样例能运行,你应该调试另一个样例,因为接下来的内容很快会变得复杂起来。
虽然BBC micro:bit和闪灯样例不兼容,这并不会有什么严重的影响,我还是选择它作为实验板。Zephyr中还有几个针对它的样例(在samplesoardsbc_microbit文件夹中),“显示”(display)样例比单一LED闪烁样例要更好。Zephyr只针对600多种支持的开发板的不到5%提供了样例。另外,许多样例是更加进阶或者少见的用例。
当你针对BBC micro:bit、ESP-WROOM-32或者其他不兼容的开发板构建闪灯样例时,编译会给出一个难以理解的错误。错误信息想要告诉你,led0是一个未知的对象,led0是默认的闪灯LED(类似Arduino中的LED_BUILTIN)。micro:bit有着可以连接LED和其他外设的扩展端口,让我们将其中一个定义为led0。
在此之前,让我们复制一份samples/basic/blinky文件夹作为备份。下面的步骤中我们会修改samples/basic/blinky中的内容。
6.1 设备树
为了定义led0,我们需要使用设备树。设备树由一个或者更多文本文件定义,其中列出了电路板上或者控制器中的外设和可用存储。在Zephyr中,这些文件的后缀名为.dts或.dtsi(i表示include——包含),一个文件可以包含另一个文件。处理器.dtsi文件在dts文件夹中,开发板.dts和.dtsi文件在boards文件夹中,两个文件夹内容都按照处理器架构分类。
你可以使用Visual Studio Code中的DeviceTree插件[4]查看DTS/DTSI文件,这一插件支持语法高亮和查找,增加文件的可读性(DTS文件的语法类似C语言)。图5所示的是nRF51822(BBC micro:bit V1的核心)的.dtsi文件的一部分,开发板的DTS文件包含这一文件。注意到uart0的状态是“disabled”(禁用),但是在开发板的DTS文件中将其覆盖为“okay”,即可以使用,gpio2和i2c0也是同样。
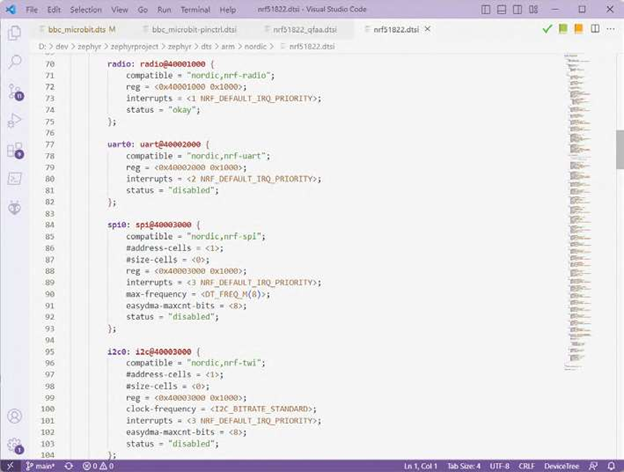
图5:nrf51822.dtsi文件的一部分,从右侧的缩略图可以看到文件十分长。
6.2 设备树中的I²C总线
图6所示的是BBC micro:bit的.dts文件的一部分,其中展示了I²C总线的设备树。micro:bit的总线上有一个或两个传感器(根据不同的V1板种类有所不同),在树中分别为mma8653fc和lsm303agr(后者中有两个传感器,所以在树中出现两次)。前者状态为“okay”,后者则为“disabled”,这对我的初代micro:bit V1开发板而言是正确的。
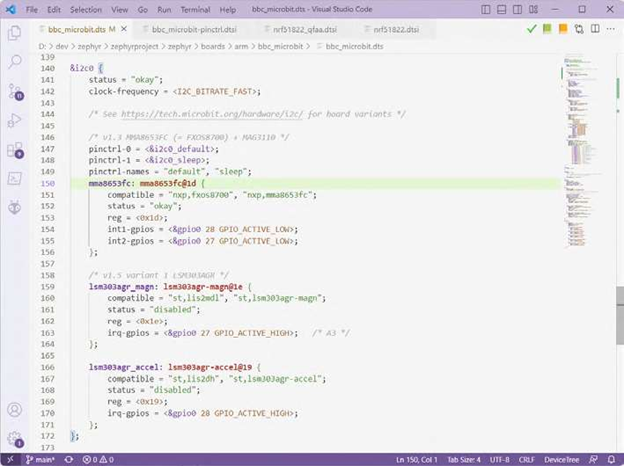
图6:设备树的这一部分代表了BBC micro:bit板的I²C总线,而不是处理器;出自bbc_microbit.dts文件。
片段中所示的传感器与FXOS8700和MMA8653FC兼容,在I²C总线上的地址为0x1d,两个被声明的中断信号(int)分别与GPIO引脚27和28相连。该传感器有一个代码样例供实验用:
west build -p always -b bbc_microbit samples/sensor/fxos8700
west flash
这个样例无法在BBC micro:bit V2上工作,因为其设备树上的传感器有所不同。
样例的输出如图7所示。
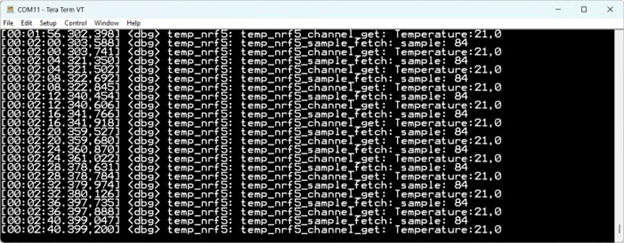
图7:samples/sensor/fxos8700样例在BBC micro:bit上的输出。
6.3 设备树的覆盖
回到前面提到过的led0,设备树中没有提及led0,所以我们需要进行添加。我们可以直接在设备树文件中添加,但这并不正确,开发板上并没有led0。正确的方法是在设备树上添加一个覆盖层,已有的设备树会根据覆盖文件的内容进行扩展(新的项目)或是覆写(项目已经在树中存在)。在这里我们需要添加新的项目。
覆盖文件必须放置在工程文件夹的boards子文件夹中。当这一子文件夹存在时,构建过程会在其中搜索名为
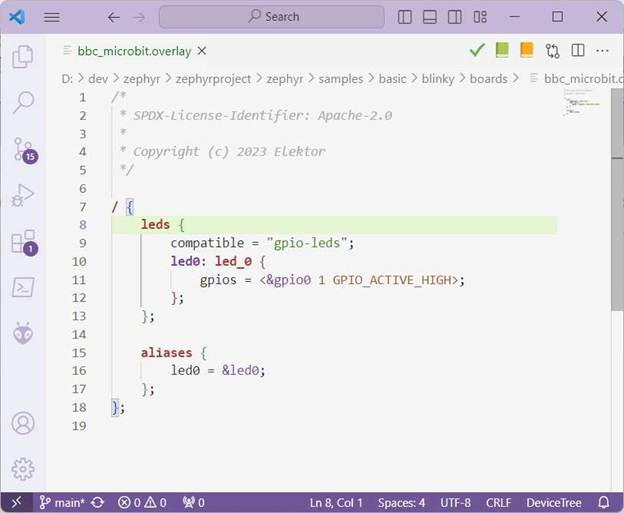
图8:让BBC micro:bit V1与闪灯样例兼容的设备树覆盖文件。
6.4 增加一个闪灯LED
Zephyr针对LED有一个特殊的设备树关键字leds。当创建一个节点(分支)时,你可以起任何名字,但是需要将其放置在leds下,这样才能覆盖已有的leds节点。这一新节点会被添加到设备树的根上,所以在节点前添加一个正斜杠“/”,在DT语言中表示根。下一行代表这一分支与Zephyr内建的gpio-leds驱动兼容(驱动的接口可以在zephyrincludezephyrdriversled.h中找到)。
6.5 子节点
接下来是一组LED子节点,因为我只有一盏LED,所以只有一个子节点led_0,我将其标记为led0。标签(label)是可选的,但是标签让你可以在设备树的其他地方引用这一节点。另外,应用中(开发者)可以通过标签访问节点和节点的属性。
一个子结点必须指定设备的属性,这里的设备是LED,必需属性只有GPIO引脚,可选标签可以用于向应用提供文档或是用户可读信息,除此之外没有其他用途。
GPIO引脚我选择了1,即micro:bit扩展连接器上的2号大孔。如果你使用BBC micro:bit V2的话,在这里使用4(而不是1)。
6.6 创建一个别称
接下来这一步是闪灯样例所必需的:为我们的LED创建led0别称(alias)。你也许会觉得为子节点添加一个标签就足够了,但实际上并非如此。闪灯样例使用DT_ALIAS宏访问LED子节点,所以我们必须配合这个宏。这个宏需要使用别称,因此我们在设备树中添加了aliases块。如果闪灯样例使用的是DT_NODELABEL宏,别称就没有必要了,因为这个宏会直接获取led0子节点。标签和别称同为led0会有些令人疑惑,这是为了后面能够更好地解释。
6.7 Zephyr宏
尽管在C/C++编程中宏的名声并不好,Zephyr大量使用宏。有许多像DT_ALIAS和DT_NODELABEL这样的宏帮助应用和配置工具从设备树提取信息,Zephyr手册的“设备树API”(“Devicetree API”)章节有对它们的介绍。
一个有趣的发现:许多(也许是全部?)Zephyr宏都要求参数为小写字母和数字,其他符号都会被替代为下划线,这被称为“小写字母和下划线兼容”。举例来说,如果我将LED子节点标记为LED-0(而不是led0),那么传递给DT_NODELABEL的参数将会成为led_0,即DT_NODELABEL(led_0),这是因为‘-’不是字母或者数字,而且字母必须都为小写。换言之,对于使用设备树宏的应用开发者而言,下划线就是一个通配符,led_0可以指led_0、led-0、Led_0、LED-0或者ledé0等等。建议你仔细阅读Zephyr的宏文档。
6.8 你不能犯错误
注意,如果你在设备树上犯了错误,编译器会显示致命错误,而并不会提供有用的信息。
6.9 纯净构建
当你修改设备树时,你很可能会经常需要重新构建你的应用。为了加快速度,去掉build命令中的“-p always”(p代表pristine——纯净),这样命令就不会从头构建所有文件。但是,如果你在逐个尝试不同的样例,你需要保留这个选项,否则你会看到构建文件夹不正确的错误。
flash命令也会运行最后执行的build命令,所以每次你做出更改之后可以直接运行flash命令。
6.10 使用设备驱动
闪灯样例通过调用gpio_pin_toggle_dt()函数改变LED的状态,该函数在GPIO驱动中。这一方法当然没有问题,Zephyr还另外有一组LED驱动。使用LED驱动可以让代码变得更可读,还可以提高程序的弹性和可移植性。这是因为LED驱动可以快速替换,应用代码不需改变。Zephyr的可缩放性和模块化在这里就体现出来了。
6.11 Kconfig的图形用户界面
将LED设备驱动整合到程序中需要几个步骤。首先,重新配置工程以包含驱动。工程的配置由Kconfig处理,即在Linux中使用的内核构建配置系统。有多种方式可以和Kconfig交互,其中一种是通过图形用户界面(GUI)。在Zephyr中通过以下命令打开图形界面:
west build -t guiconfig
GUI需要些时间才会打开,你会看到类似图9这样的界面,其中可以看到许多当前工程的信息。为了保证Kconfig能够配合你的工程,在运行GUI前先进行一次纯净构建(-p always选项)。
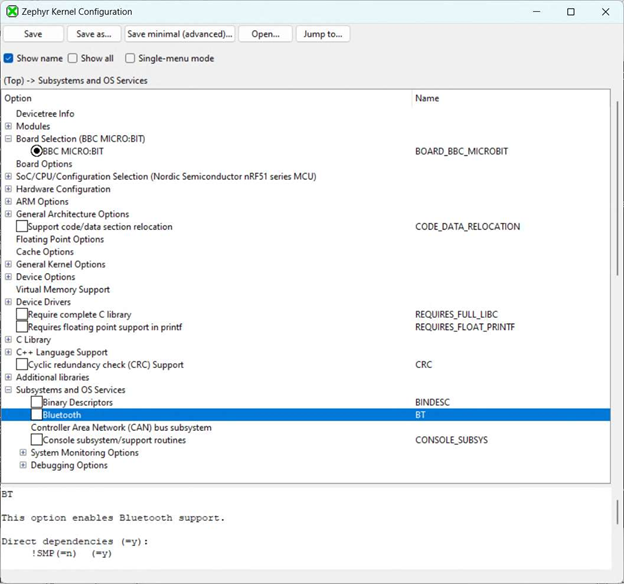
图9:Kconfig工程配置工具的GUI,其中有许多选项。
6.12 众多的配置选项
先花一点时间熟悉Kconfig的配置树,点击加号展开分支,点击选项进行标记,在下方的面板中能看到说明。可以看到printf()的浮点数支持是一个C++语言支持的配置选项。与此类似,还可以在Build and Link Features(构建和链接功能)中找到编译器优化选项。
配置树中有许多选项,Device Driver(设备驱动)分支下的选项和我们相关。展开分支,向下滚动,LED驱动大概是在一半的位置:Light Emitting Diode (LED) Drivers(LED驱动),选中这一选项。选项下的子分支不需要改变,保持默认值即可(图10)。点击Save(保存)键,记下窗口底端显示的配置文件位置,之后你可以打开这一文件查看内容。最后关闭GUI。
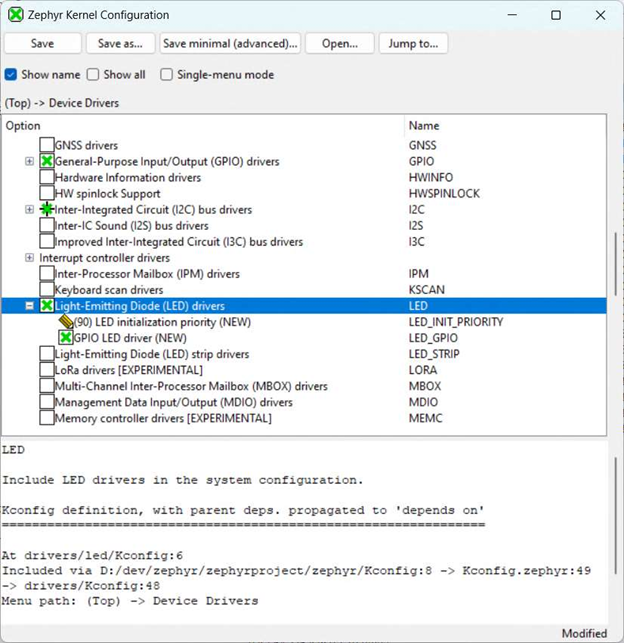
图10:选择Light Emitting Diode (LED) Drivers(LED驱动),子分支的值保持默认不变。
接下来在构建时就不要使用-p always选项了,否则会将你前面改变的配置复原。之后会介绍如何将选项永久保存。
6.13 使用LED设备驱动的闪灯样例
现在我们可以编写新的闪灯程序了,见图11。首先包含设备和LED驱动的头文件,然后在主函数中通过DEVICE_DT_GET_ANY宏从设备树取得LED设备的引用。注意到宏的参数“gpio_leds”是“小写字母和下划线兼容”的,对应设备树中leds节点compatible(兼容)属性的值“gpio-leds”(上文已经解释过)。如果你传入了错误的参数,程序无法找到节点,会输出“No device with compatible gpio-leds found”(无法找到具有gpio-leds兼容的设备)。如果设备的status属性被设为“disabled”,同样的消息也会出现。
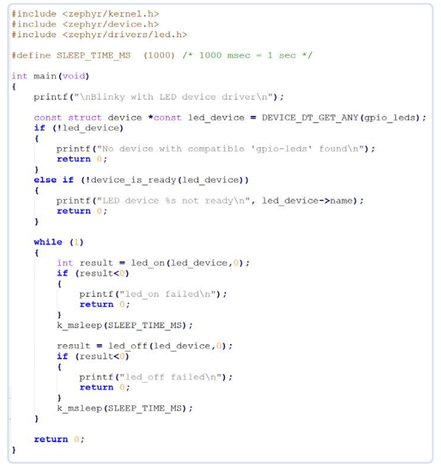
图11重新编写了 Blinky 程序以与 LED 设备驱动程序一起使用。请注意,该代码没有局限在某种开发板。该程序可以在任何设备驱动中列出了 gpio_leds(或 GPIO-LED) 设备树的开发板上运行。
Zephyr将兼容用作名词这件事需要花时间习惯,上面的错误信息不意味着没有兼容的设备,而是没有设备的“兼容”属性的值为“gpio-leds”(也就是“gpio_leds”,下划线替代了a到z和0到9以外的字符)。
第二个检查验证设备是否正确地初始化,如果是的话,我们将继续。
在无限while()循环中,代码通过驱动提供的led_on和led_off命令[6]点亮和熄灭LED,参数0代表DEVICE_DT_GET_ANY宏找到的第一个(也是唯一一个)设备,也就是led0。
6.14 检查返回值
因为我们使用设备驱动,而不是在硬件寄存器层直接切换GPIO引脚状态,所以应当检查驱动函数调用的返回值,确保没有发生错误。驱动必须提供函数和回调,也有可选的功能。举例来说,LED驱动必须实现led_on和led_off,但是led_blink是可选的。在本实验中,led_blink未被实现,如果你调用的话,什么也不会发生。这一函数存在,但是其中没有内容,返回值会告诉你这一点。一般来讲,检查每个函数调用的返回值是良好的编程习惯。
通过下面的命令构建和上传程序(注意没有添加-p always选项):
west build -b bbc_microbit samples/basic/blinky
west flash
6.15 配置工程
当LED以0.5HZ的频率开始闪烁,就说明我们的程序能够运行。这时我们需要永久保存当前的配置,打开闪灯文件夹prj.conf文件,添加下面一行(Kconfig配置文件使用Python语法,不像设备树使用C语言语法):
CONFIG_LED=y
为了检查配置成功,进行一次纯净构建,并将可执行文件上传到开发板上。
6.16 调试
如果你的开发板允许调试(比如BBC micro:bit),或者你有合适的调试工具,运行下面的命令进行调试:
west debug
该命令会启动GDB服务器,并打开GDB命令行界面(图12)。你可以在线学习如何使用GDB,这一部分不属于本文的范畴之内。
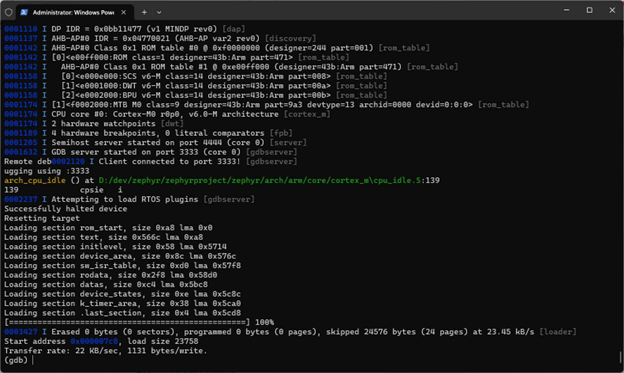
图12:BBC micro:bit有原生gdb调试支持,不需要额外的工具。
7. Zephyr与Arduino的对比
现在你上手了Zephyr,你可能会想:为什么要使用它?Arduino难道不是更简单?Arduino与Zephyr类似,支持许多处理器架构和数百款开发板。Arduino还有着数千种驱动和软件库,如果一款应用或者一个软件库使用Arduino核心API,它可以被快速移植到有着类似外设的兼容平台上。Arduino的软件也是开源的,所以Zephyr有什么优势?
Zephyr是作为一款工业级、健壮的RTOS设计的,支持任务调度、内存管理和设备驱动等功能。Zephyr能够适应不同的项目复杂度,从小型的IoT设备到复杂的嵌入式系统。Zephyr提供更大的弹性,但是需要开发者对嵌入式开发有着深入的理解。
Arduino提供一定的实时性,但它不是一款RTOS,而是一款强调简洁和易用的单线程应用框架。Arduino将许多底层细节都进行了抽象化,让它对初学者非常友好。对于更加复杂的应用,Arduino可以在RTOS上使用,例如Mbed OS。将Arduino核心API移植到Zephyr的工作正在进行中。
在下一个项目中是否要使用Zephyr取决于你。至少你应该稍微进行尝试,毕竟Zephyr会为任何一位嵌入式开发者的简历添彩。
8. 进一步的阅读
本文到这里就结束了,你应该已经发现Zephyr OS很复杂,学习曲线也比较陡峭。我希望本文让你的学习过程变得简单了一些,但这些只是基础知识,关于Zephyr还有非常多需要学习的课题。参考资料[8]和[9]包含一些我认为有用的内容。
-
微控制器
+关注
关注
48文章
7714浏览量
152628 -
嵌入式
+关注
关注
5103文章
19268浏览量
309989 -
Linux
+关注
关注
87文章
11373浏览量
211287 -
RTOS
+关注
关注
23文章
829浏览量
120128 -
Zephyr
+关注
关注
0文章
29浏览量
6065
原文标题:Zephyr RTOS入门 —— 复杂但是强大
文章出处:【微信号:麦克泰技术,微信公众号:麦克泰技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
深入理解和实现RTOS_连载
深入理解和实现RTOS_连载
应用Bluetooth Smart技术的全套智能骑行设备的技术细节和应用场景,不看肯定后悔
MIT公布“盲动”机器人技术细节
意法半导体公布ST54J系统芯片(SoC)的技术细节
一文解析鸿蒙系统诞生背景、技术细节生态圈
深入了解目标检测深度学习算法的技术细节

深入了解目标检测深度学习算法的技术细节

LED显示屏的换帧频率与刷新频率:技术细节与市场发展






 工商网监
工商网监
评论