 其利天下技术·伺服电机的工作原理及常用控制算法-低压伺服电机驱动方案开发
其利天下技术·伺服电机的工作原理及常用控制算法-低压伺服电机驱动方案开发
伺服电机作为精密控制系统的重要组成部分,广泛应用于工业自动化、机器人、数控机床、自动化生产线等领域。随着技术的进步和行业需求的不断变化,伺服电机也在不断发展。今天,我们聊聊伺服电机的工作原理、控制方式以及常用的控制算法。
 其利天下·低压伺服电机驱动器方案
其利天下·低压伺服电机驱动器方案伺服电机的工作原理
闭环反馈系统:
伺服电机的核心是闭环控制系统,闭环反馈通过传感器(编码器或旋转变压器)实时监测电机的运行状态(如位置、速度等),将反馈信号传回控制器。
控制器将反馈值与目标值(设定值)进行比较,生成误差信号,再通过驱动器调整电机的电压、电流,修正电机的动作。
反馈调节:
当电机转动时,传感器实时测量转动的角度或速度,并将信号反馈给控制系统。
控制系统对比反馈信号与预设目标值,利用控制算法产生调节信号,通过驱动器控制电机的运动,使电机逐步逼近设定的目标。
伺服电机的控制方式
位置控制:
控制电机的转动角度,确保其在某一目标位置停留。 控制器接收位置指令信号(通常是脉冲信号),通过反馈装置(如编码器)调整电机转动,确保精确到达目标位置。 这种方式多用于精密加工、机器人等需要精准定位的场合。
速度控制:
通过调节电机的输入信号控制其旋转速度,通常通过调节驱动器的输入频率或电压实现。 控制器实时监测电机速度,调节电流以保持目标速度,适合传送带、卷绕机等需要恒速运转的设备。
力矩控制(扭矩控制):
控制电机输出的扭矩,通过调节电流来调整力矩大小。控制系统实时监测电流变化,并调节输出,确保电机的输出力矩保持稳定。 这种方式常用于需要恒定力矩的应用场景,如张力控制、负载变化较大的设备。
伺服电机的常用控制算法
PID 控制算法:
PID(比例-积分-微分)控制是伺服电机中最常见的控制算法,用于调节位置、速度和力矩控制。
P(比例):控制当前误差,响应迅速。
I(积分):累积误差,消除长期误差。
D(微分):控制误差的变化率,提升系统的稳定性和响应速度。
PID 控制通过调节三个参数(比例、积分、微分),确保系统迅速达到设定值并避免过冲或震荡。
模糊控制算法:
模糊控制是一种基于经验和规则的控制方法,用于处理复杂的、非线性系统。
模糊控制适用于系统模型难以精确建立的情况,通过模糊规则集对系统进行控制,常用于负载变化较大或干扰较多的场景。
自适应控制算法:
自适应控制可以根据电机的动态行为自动调整控制参数,适应不同的工作条件。
该算法实时监控电机的状态,动态调节控制器参数,适用于负载变化较大的伺服系统。
滑模控制(SMC):
滑模控制是一种非线性控制方法,能够在不精确的模型条件下提供鲁棒控制。它通过设计滑模面,让系统在滑模面内保持稳定,从而减少系统的抖动和误差。
滑模控制适合在存在外部干扰和建模不准确的环境下使用。
模型预测控制(MPC):
模型预测控制通过预测系统的未来行为,计算最优控制信号,适合复杂、多输入多输出系统。
伺服控制中的MPC可以提前预测并优化系统的控制路径,常用于高动态响应需求的场合。
神经网络控制:
神经网络控制算法使用神经网络的自学习能力,根据输入和输出关系动态调整控制策略,适用于非线性、复杂的控制系统。
这种算法可以适应不同的工作条件,尤其是在伺服系统中存在未知非线性或复杂关系时表现出色。
-
控制器
+关注
关注
113文章
16562浏览量
180303 -
电机
+关注
关注
143文章
9137浏览量
146934 -
电机驱动
+关注
关注
60文章
1239浏览量
87086 -
伺服电机控制
+关注
关注
0文章
17浏览量
7561 -
PCBA板
+关注
关注
0文章
144浏览量
11402
发布评论请先 登录
相关推荐
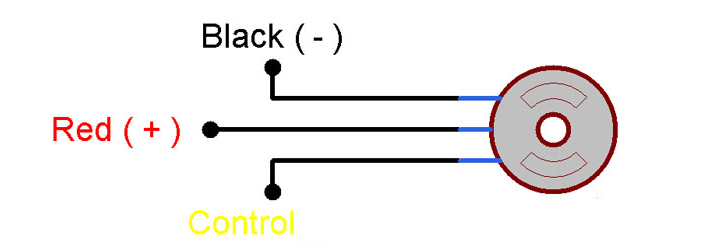
伺服电机的引脚图/工作原理/应用

什么是伺服电机?伺服电机的工作原理是什么?
其利天下技术·伺服电机编码器的作用及工作原理·低压伺服电机驱动方案开发

其利天下技术·伺服电机编码器的种类及优缺点分析·伺服电机驱动器方案开发

其利天下技术开发·引起伺服电机抖动的可能性因素·伺服电机驱动器开发






 工商网监
工商网监
评论