 端到端让智驾强者愈强时代来临?
端到端让智驾强者愈强时代来临?
编者语:「智驾最前沿」微信公众号后台回复:C-0572,获取本文参考报告:《信达证券:端到端革命开启,强者愈强时时代即将来临》pdf下载方式。
随着科技进步和汽车技术的发展,智能驾驶时代已然到来,智能驾驶技术也成为众多车企研究的重点方向。而在这个过程中,端到端架构(End-to-End, E2E)作为核心技术,逐渐崭露头角,成为推动智能驾驶的关键力量。
汽车智能化:从传统技术到智能驾驶
1.1汽车制造的历史变迁
从内燃机汽车时代到电动汽车时代的过渡,全球汽车产业经历了数次技术革新。燃油车时代,车企的核心竞争力主要体现在发动机、变速箱和底盘的机械技术上。欧美和日本的传统车企,如大众、丰田等,通过多年的技术积累和创新,形成了难以逾越的技术壁垒。自主品牌则很难在这些技术领域实现突破,因此更多依赖与外资品牌的合作。随着电动化浪潮的到来,汽车的结构开始简化。电池、电机和电控系统逐渐取代了传统发动机成为核心部件,整车的机械复杂度显著下降。与此同时,造车门槛大幅降低,越来越多的新势力车企迅速涌现,如蔚来、小鹏等通过外购成熟的供应链方案进入市场,形成了“百家争鸣”的格局。
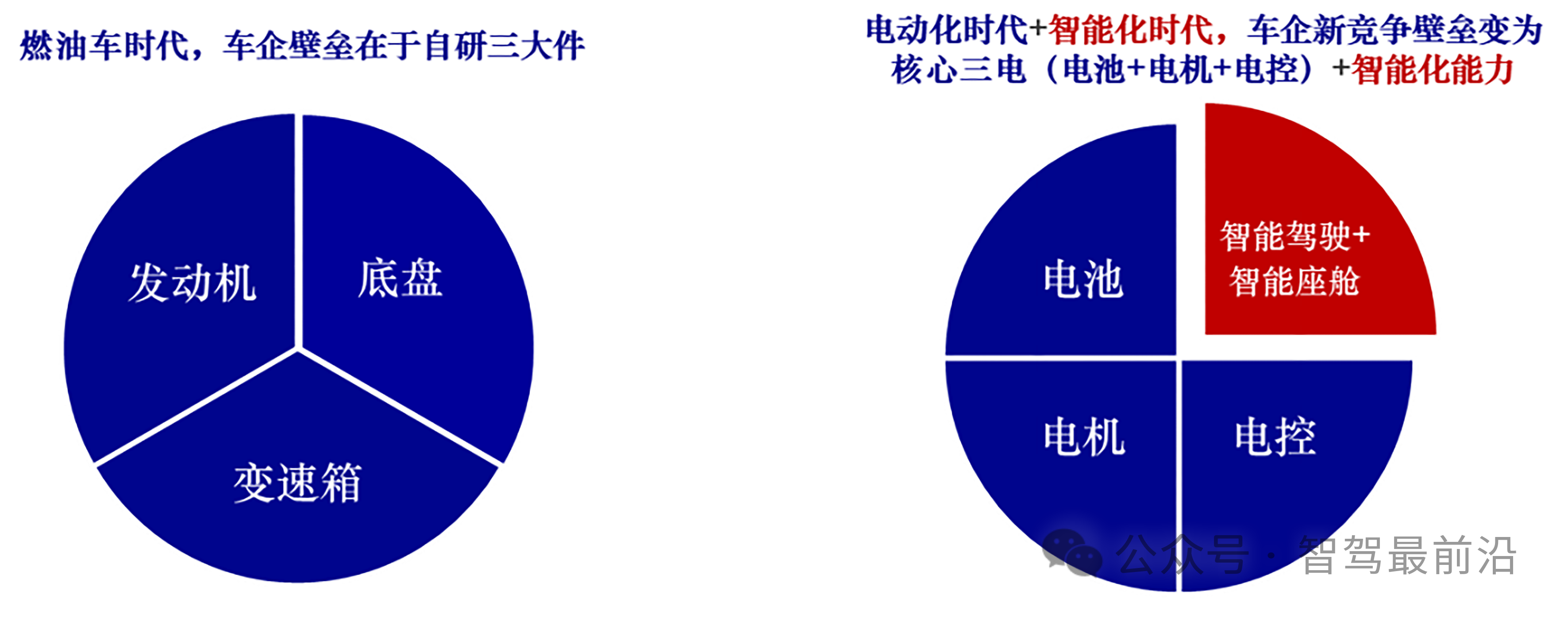
不同汽车时代车企竞争力壁垒变迁
1.2智能化转型中的新竞争壁垒
电动化只是汽车技术变革的第一步,智能化才是下一步的关键。尤其在自动驾驶技术的发展中,数据和算力成为新的竞争核心。智能驾驶不仅需要车辆感知环境,还要求车辆能够自主做出复杂的决策,并在各种驾驶场景中安全行驶。实现这一目标的基础,是大量的训练数据和强大的计算能力。而端到端架构正是在这一背景下应运而生,通过整合深度神经网络和数据驱动的技术方法,端到端架构能够显著提升自动驾驶的性能和效率,使得那些拥有大量数据和算力的企业在竞争中占据先机。因此,端到端架构的崛起让汽车行业的竞争壁垒从传统的机械制造,转向了数据和算法的领域。
端到端架构的技术基础与发展路径
2.1端到端架构的基本定义
端到端架构是指从输入数据(如传感器采集的环境信息)到输出控制指令(如车辆转向、刹车等)的整个过程都通过深度神经网络模型来完成,而不再依赖人为预设的规则。与传统的自动驾驶系统不同,端到端架构通过学习和理解驾驶场景中的数据来生成最优决策。在传统的自动驾驶架构中,任务被分为多个模块,如感知、定位、决策、控制等,每个模块独立执行各自的功能,并通过模块间的接口传递信息。这种架构的优点是模块化开发方便调试,但其缺点也显而易见:模块间信息传递时会出现延迟和数据损耗,且难以适应复杂的道路场景。
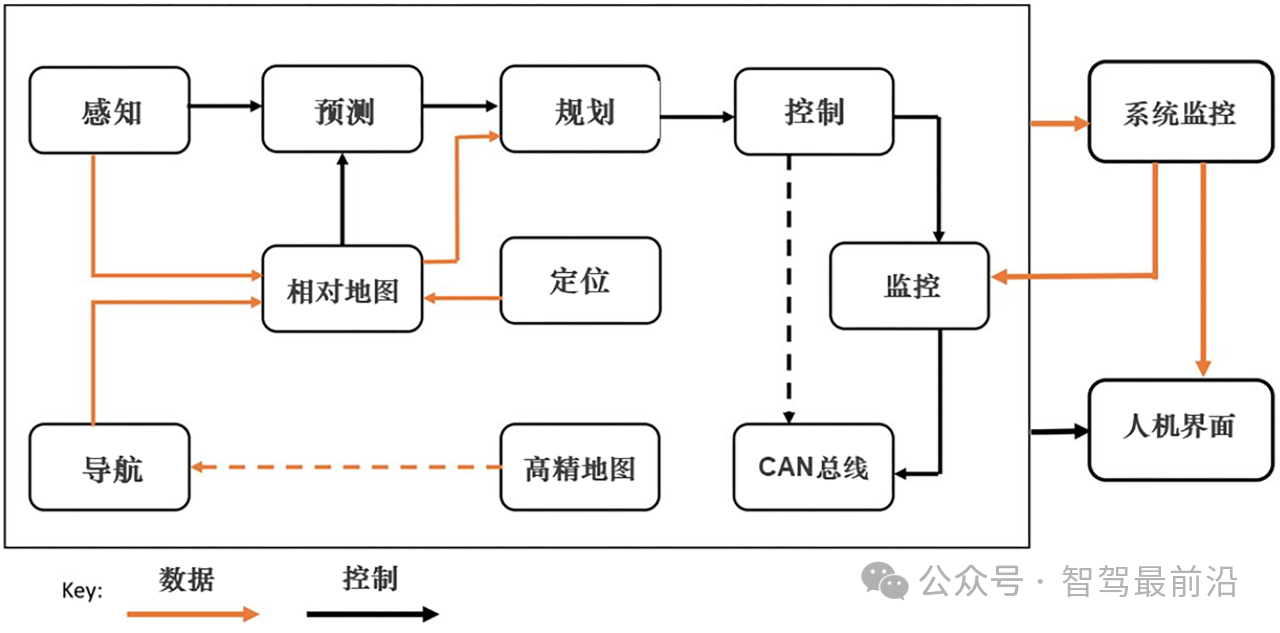
传统自动驾驶架构
相比之下,端到端架构通过深度学习模型直接处理从环境感知到车辆控制的全部过程,大大减少了信息传递的损耗,并能够通过海量数据的学习,提高决策的准确性和适应性。这使得端到端架构成为未来高阶自动驾驶技术的重要基础。
2.2深度学习技术在端到端架构中的应用
端到端架构依赖于深度学习的进步,尤其是神经网络模型在图像处理、语音识别和自然语言处理等领域的广泛应用。自动驾驶领域中,最常见的深度学习模型包括卷积神经网络(CNN)和循环神经网络(RNN)。其中,卷积神经网络广泛用于处理来自摄像头的图像数据,识别出道路、车辆、行人等信息;循环神经网络则用于处理车辆运动中的时间序列数据,如车辆的速度、加速度等。这些模型的核心原理是通过前向传播和反向传播的训练过程,不断调整神经网络中的权重和偏差,输出最优的决策结果。在自动驾驶的场景中,系统通过输入来自环境的多模态数据(如摄像头、激光雷达、超声波等),经过深度学习模型的多层处理,最终生成具体的驾驶指令。一个典型的端到端神经网络架构,通常包含多个隐藏层,每个隐藏层都对输入数据进行进一步的特征提取。例如,在识别一个红绿灯时,第一层隐藏层可能会识别出光的强度变化,第二层隐藏层则会识别出红绿灯的形状,第三层则会判断当前灯光的颜色,从而生成最终的控制信号。
2.3端到端架构的技术演进:从感知到一体化
端到端架构的发展可以分为以下几个阶段:感知端到端:这一阶段,主要集中在感知任务的端到端实现,通过摄像头和激光雷达等传感器,利用神经网络模型处理周围环境数据,并直接生成感知结果。目前,这一模式已经较为成熟,尤其是在城市道路的自动驾驶场景中,能够实现车辆对复杂环境的精准感知。模块化端到端:模块化端到端是指在感知端的基础上,将感知、决策和控制整合为一个模块化的系统。虽然各模块间仍然存在信息接口,但神经网络的引入让系统能够更好地实现信息传递与整体优化。与传统模块化架构相比,这一阶段减少了数据损耗,并提升了算法的整体效率。一体化端到端:这一阶段,端到端架构将彻底消除模块间的界限,所有的感知、决策和控制任务将通过一个单一的神经网络模型完成。这个模型将不仅仅局限于单一任务,而是具备更广泛的泛化能力,能够应对复杂和未知的场景。未来的端到端架构或将结合强化学习和模仿学习,实现真正的一体化自动驾驶。
端到端架构的优势与技术挑战
3.1端到端架构的技术优势
与传统的模块化自动驾驶系统相比,端到端架构具备以下技术优势:数据驱动的全局优化:端到端模型依赖于大量的驾驶数据,通过持续的学习和训练,能够对整体任务进行全局优化,快速纠正错误并提升系统的准确性。这种数据驱动的方式使得系统能够在不同场景下灵活应对复杂的驾驶环境。减少信息传递损耗:在传统模块化架构中,信息在不同模块之间传递时,常常会出现数据压缩、延迟和误差累积等问题。端到端架构通过神经网络的直接处理,减少了这些中间环节,避免了信息的损耗。泛化能力更强:端到端架构能够通过神经网络模型学习大量的驾驶数据,提升系统应对长尾场景和极端情况的能力。例如,面对道路施工、临时障碍物或突发天气情况,端到端模型可以根据之前学到的驾驶经验,快速做出相应的决策。这种泛化能力使得端到端架构的适应性比传统的基于规则的系统更强。
3.2数据与算力:端到端架构的核心瓶颈
尽管端到端架构在技术上具备诸多优势,但其成功的关键在于数据和算力的支持。数据挑战:端到端架构依赖于大量的高质量数据,而这些数据的获取成本极高。对于车企来说,确保数据的多样性和准确性是端到端架构成功的关键。例如,特斯拉通过其庞大的FSD用户群体,能够持续收集全球范围内的驾驶数据,这使得其端到端模型能够不断优化。然而,对于中小车企来说,如何积累海量数据仍然是一个巨大的挑战。
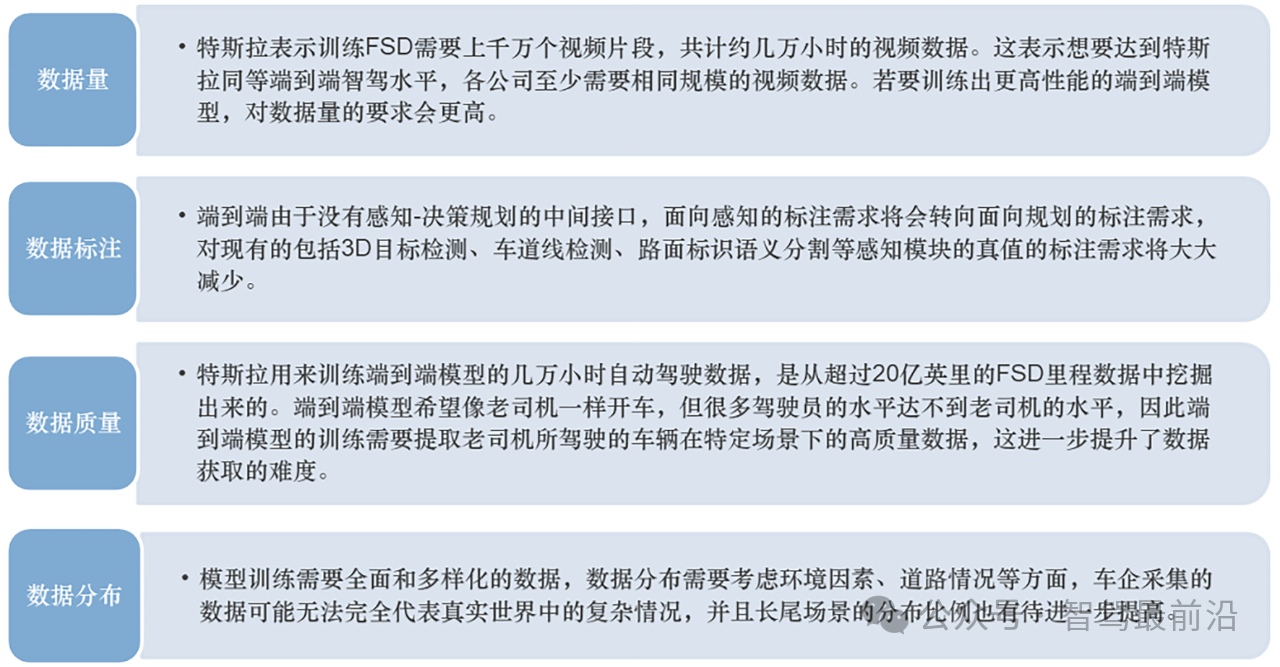
端到端对数据的要求
算力挑战:端到端模型的训练需要强大的算力支持。当前,端到端架构的模型规模和复杂度不断增加,算力需求也在迅速攀升。特斯拉、华为等公司通过自建计算中心,部署了数万张GPU卡片来支持模型的训练。而在未来,随着技术的发展,车企将需要更多的算力来处理更复杂的自动驾驶场景,这也使得算力成为车企竞争的核心。
行业案例与实践:端到端架构的应用现状
4.1特斯拉的FSD系统:端到端架构的先行者
特斯拉作为端到端自动驾驶技术的先行者,其FSD(Full Self Driving)系统自2020年发布以来,已经进行了多次迭代。特斯拉通过其全球范围内的FSD测试用户,不断收集驾驶数据,并通过端到端神经网络模型实现对道路、行人和交通信号灯的精准识别。
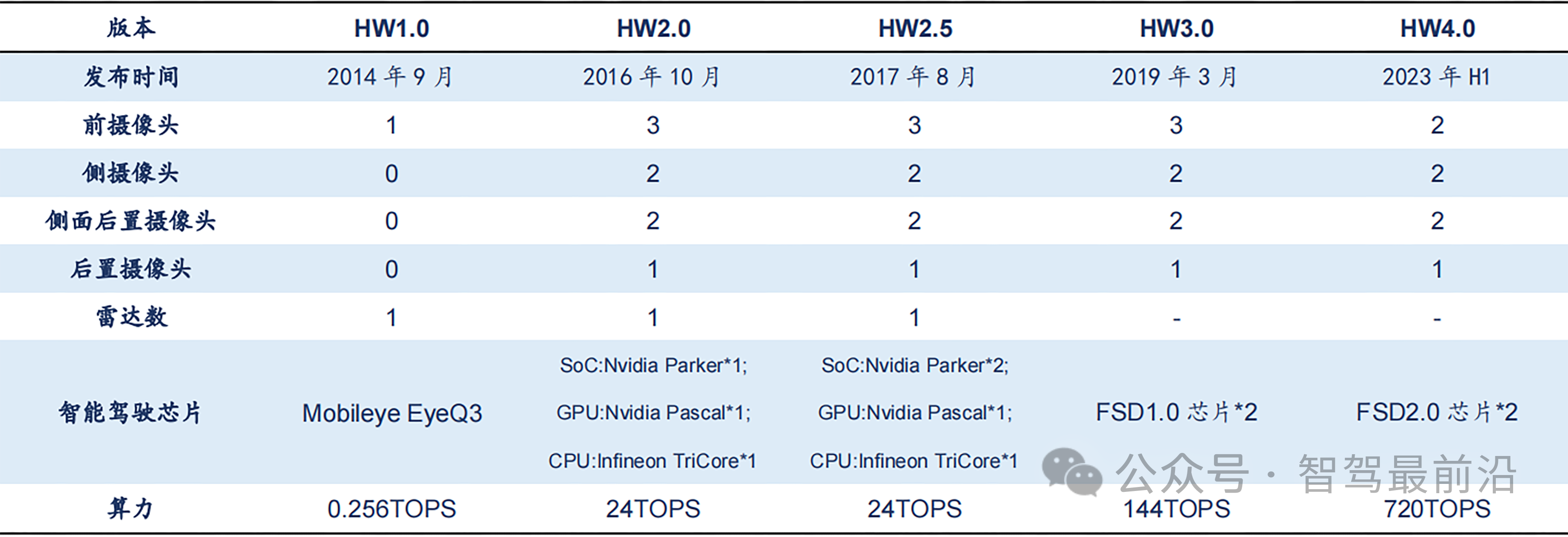
特斯拉智能驾驶硬件迭代历程(HW1.0-HW4.0)
目前,特斯拉的FSD系统已经能够在城市街道和高速公路上实现自动驾驶,并逐步在全球范围内推广。特斯拉的端到端架构在全球自动驾驶市场中占据了领先地位,这得益于其强大的数据闭环和算力支持。通过引入端到端架构,特斯拉的FSD系统显著提升了自动驾驶的流畅性和安全性。尤其是在复杂的城市环境中,FSD能够处理各种突发情况,如行人横穿马路、前方车辆突然减速等。此外,特斯拉通过其强大的算力集群,持续对FSD系统进行更新和优化,不断提升驾驶体验。
4.2国内车企的端到端技术实践
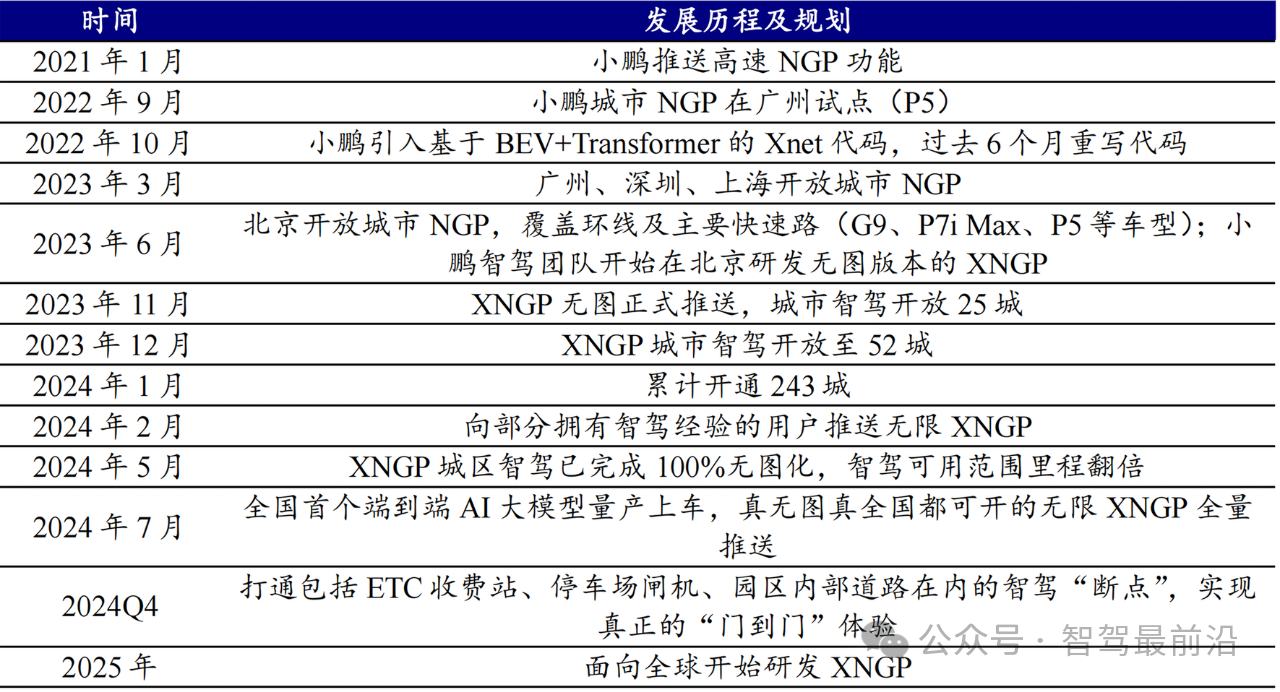
在国内,华为、小鹏、理想等车企也在积极布局端到端自动驾驶技术。其中,华为的ADS系统通过深度学习模型,实现了感知、决策、控制的端到端整合,成为国内端到端自动驾驶技术的代表之一。小鹏汽车则通过其XNGP系统,将端到端技术应用于城市道路的自动驾驶场景中。小鹏的端到端架构通过摄像头和激光雷达等传感器数据的融合,能够在没有高清地图的情况下,实现对复杂道路环境的感知和决策。此外,小鹏还通过与云计算平台的合作,进一步提升其端到端模型的训练效率和适应性。

小鹏模块化端到端算法架构
理想汽车则通过引入VLM(Visual-Language Model,视觉语言模型)大模型,提升了端到端系统的可解释性和精度。通过结合端到端神经网络与大模型,理想的自动驾驶系统能够更好地理解交通标志、路况等信息,从而做出更准确的驾驶决策。

理想端到端算法架构
端到端架构的政策与法律挑战
5.1自动驾驶技术的政策推动
自动驾驶技术的发展离不开政策的支持。在全球范围内,各国政府正逐步出台相关政策,推动自动驾驶技术的研发和落地。在美国,自动驾驶技术的测试已经在多个州得到了许可,而中国也在加速自动驾驶的立法进程,为智能网联汽车的规模化应用提供了法律保障。端到端架构作为自动驾驶技术的重要组成部分,也需要面对复杂的政策环境。各国的监管机构将逐步完善相关法规,确保端到端架构在实际应用中的安全性和可控性。未来,端到端架构需要符合更严格的安全测试标准,并在事故发生时提供透明的责任划分机制。
5.2算法的不可解释性与法律责任
端到端架构的“黑盒”属性使得其决策过程难以解释,这在法律责任方面带来了巨大挑战。当自动驾驶车辆发生事故时,如何判断责任归属将成为一大难题。尤其在端到端架构下,系统的决策逻辑难以追溯,这使得监管机构和法律体系需要重新评估自动驾驶的责任划分标准。为了应对这一挑战,未来可能需要引入更加透明的模型解释机制,如理想汽车所使用的视觉语言大模型,能够帮助监管机构理解系统的决策过程。此外,相关法律法规可能会要求车企记录和存储每次驾驶决策的详细数据,以便在发生事故时提供证据支持。
未来的技术趋势与市场前景
6.1技术趋势:从端到端到多模态大模型
未来,端到端架构将与多模态大模型相结合,进一步提升自动驾驶系统的智能化水平。通过整合视觉、语言、感知等多种数据源,多模态大模型能够实现更加精准的环境感知和决策能力。这一技术趋势将推动自动驾驶从现有的L2+级别向L4/L5级别过渡,实现真正的无人驾驶。此外,世界模型的引入也将改变端到端架构的现状。通过重建真实世界的物理规律,世界模型将帮助自动驾驶系统更好地理解和预测周围环境,为自动驾驶系统提供更智能的决策支持。
6.2市场前景:端到端架构的规模化应用
随着技术的不断成熟,端到端架构将在未来几年内实现规模化应用。特斯拉、华为等企业已经在全球范围内推广其端到端自动驾驶系统,并逐步积累用户数据。预计到2030年,全球自动驾驶市场的规模将突破万亿美元,端到端架构将成为其中的核心技术之一。与此同时,自动驾驶芯片制造商、云计算服务提供商等也将从中受益。未来,自动驾驶系统的硬件和软件需求将持续增长,推动相关产业链的发展和升级。
总结
端到端架构作为自动驾驶技术的革命性进展,正在推动整个行业向前迈进。凭借其数据驱动、深度学习和强大算力的支持,端到端架构具备显著的技术优势,能够大幅提升自动驾驶的性能和决策效率。然而,端到端架构仍然面临数据、算力和法律责任等多方面的挑战。随着政策的逐步完善和技术的持续迭代,端到端架构有望成为未来智能驾驶的主流解决方案。行业内的头部企业将在这一过程中占据主导地位,而中小车企则需要加速技术研发,跟上行业的步伐。未来,随着端到端技术的普及,全球汽车行业将迎来真正的智能驾驶时代。
审核编辑 黄宇
-
自动驾驶
+关注
关注
787文章
13992浏览量
167632 -
深度学习
+关注
关注
73文章
5527浏览量
121833 -
大模型
+关注
关注
2文章
2762浏览量
3413
发布评论请先 登录
相关推荐

Skype提供端到端加密“私人对话”功能 让你对话更安全

端到端模型卷入智驾圈 周光:今年上车!



智驾进程发力?小鹏、蔚来端到端模型上车
智己汽车“端到端”智驾方案推出,老司机真的会被取代吗?

爆火的端到端如何加速智驾落地?

特斯拉带火“端到端”智驾,国内车企加速上车

黑芝麻智能端到端算法参考模型公布






 工商网监
工商网监
评论