 基于模型的显微手术机器人设计
基于模型的显微手术机器人设计
| 作者杨量景博士,浙江大学
显微外科技术和工具使外科医生能够以极高的精度对人体组织的神经、血管和微小结构执行复杂的手术。虽然显微外科手术在改善患者治疗效果方面显示出巨大的潜力,但在亚毫米级狭窄的工作空间内进行操作需要非凡的稳定性和灵活性。熟练的外科医生可以连接直径在 0.3 到 0.8 毫米(mm)之间的血管。然而,外科医生手部不可避免的生理性震颤限制了此类吻合手术的疗效。此外,受限解剖结构中的工作空间和运动学挑战可能需要多次设计迭代,这既耗时又费钱。
微型手术机器人可以帮助外科医生克服狭窄工作空间、手部震颤和疲劳带来的限制。然而,这些机器人的设计带来了一系列新的挑战。首先,为了减少外科医生学习新工具的时间,机器人必须能够协助完成不同类型的手术,而不仅仅是一种。其次,与无人车间中的工业机器人不同,微型手术机器人直接用于人体,因此在设计时必须将患者安全放在首位。最后,为了最大限度地减少组织损伤和减少恢复时间,机器人必须是微创的——最好是通过一个小切口进行工作。
许多设计决策都取决于尽量减少侵入性,同时确保外科医生拥有足够的自由度来有效地执行手术。对于这个权衡问题,没有一个放之四海而皆准的答案,因此,显微手术机器人设计团队通常严重依赖反复试验的方法。他们必须指定需求、创建满足这些需求的设计,然后组装原型。然后,设计团队对原型进行测试,以进一步细化需求,然后重复此循环。通常需要多次进行迭代优化,而由于每次迭代都要搭建硬件原型,会使迭代周期变得漫长。
在浙江大学,我和我的同事采用以设计为中心、基于模型的方法来开发机器人辅助微创手术系统。利用这种方法,我们最近设计了一种基于平行四边形结构的吻合和眼科手术机器人操作器。我们用 Simulink 进行了计算分析和仿真测试和 Simscape Multibody 来可视化操作器的末端执行器轨迹,并确认设计满足安全性和手术可操作性的要求(图 1)。这种方法加快了开发速度,使我们能够在投入时间和资源构建硬件原型之前发现并解决许多设计问题。
图 1. 机械手 Simscape Multibody 模型的动画,展示了围绕远程运动中心 (RCM) 的运动。
设计机械机构
我们通过定义显微外科手术操作器的需求和设计目标开始了我们的设计过程。例如,其中包括尖端的精度目标小于 10 微米、运动范围为 20x20x20 毫米,以及系统末端执行器的快速更换机制,使外科医生能够在手术过程中快速更换器械。
该系统的一个关键设计组件是远程运动中心 (RCM) 机制,它将仪器的自由度 (DOF) 限制为三个旋转 DOF(ψ、φ 和 θ) 围绕切口,并在器械插入方向上有一个平移自由度 (Z)。我们设计了一个双平行四边形结构,使末端执行器能够在整个工作空间内移动,运动范围如下:ψ:±45°;φ:±75°;θ:360°;Z:32毫米。我们首先通过基于第一性原理的数学模型分析了该结构,然后在 SolidWorks 中为其创建了一个 CAD 组件(图 2)。

图 2. 双平行四边形结构的 SolidWorks 装配体。
在 Simscape Multibody 中执行基于仿真的分析
我们的下一步是使用 Simscape Multibody Link 插件从 SolidWorks 导出 CAD 组件,然后将生成的 XML 多体描述文件导入 Simscape Multibody 以创建我们设计的 Simscape模型(图 3)。我们在 ϕ、ψ 和 Z 关节处添加了电机以进行运动控制,并使用位置传感器运行了多次模拟以跟踪末端执行器的位置和运动。
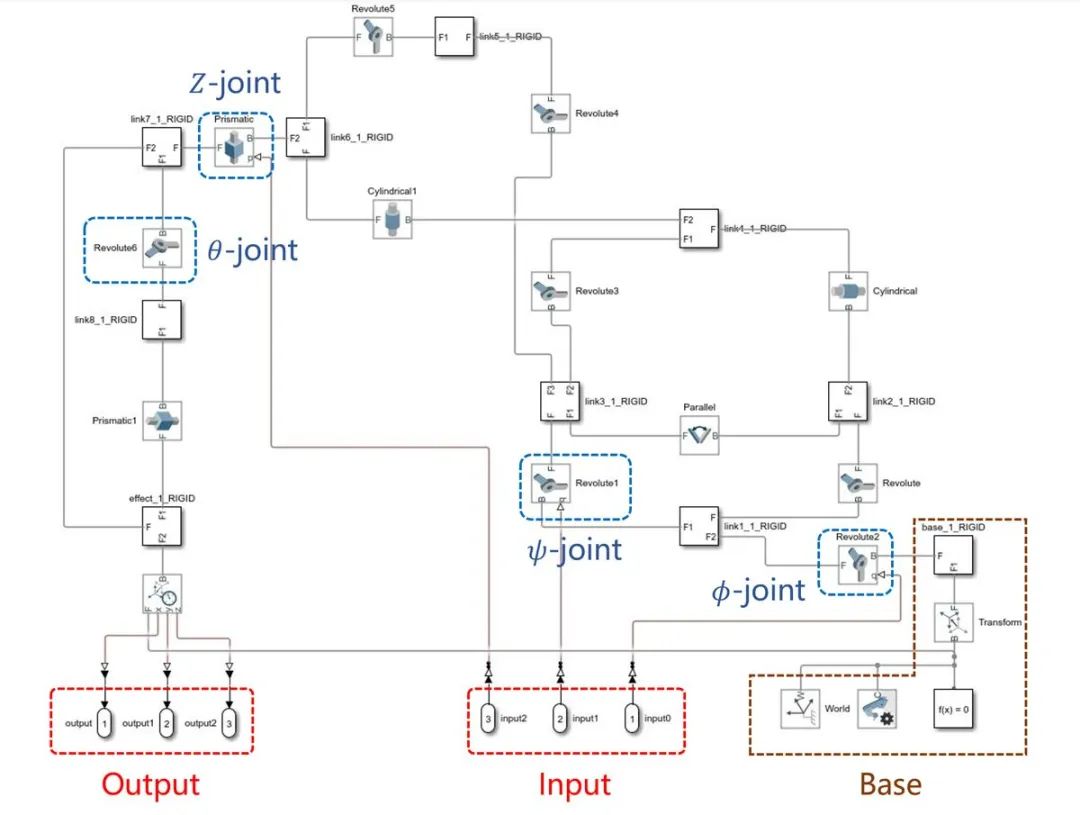
图 3. 机械手的 Simscape Multibody 模型。
通过在 MATLAB 中分析和绘制这些模拟的结果,我们可视化了吻合手术中立方体空间内末端执行器的范围以及眼科手术中球形空间内末端执行器的范围(图 4)。这是为了确保患者的安全以及手术成功的高概率,并且在手术过程中可以触及解剖结构中的所有点。该评估需要使用机器人的运动学来开发点云并评估传统手术干预中的轨迹。
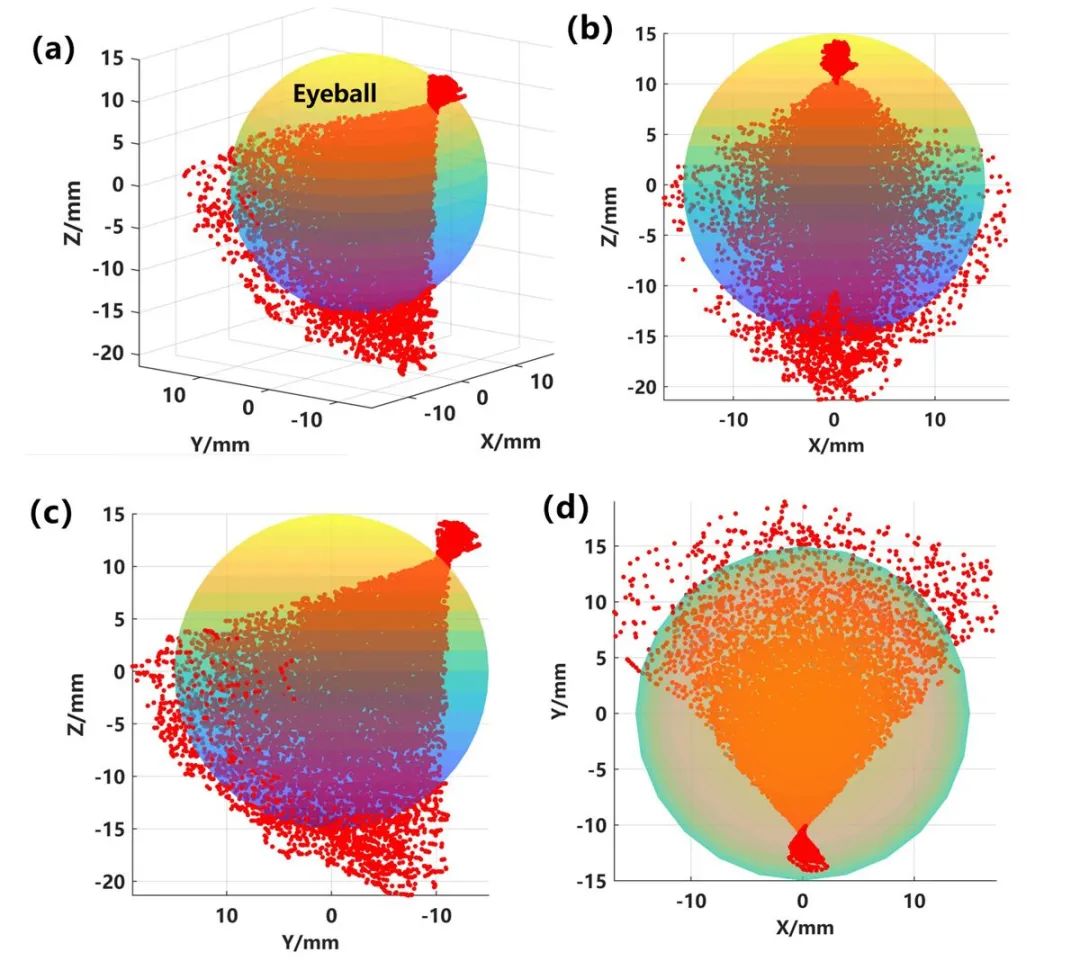
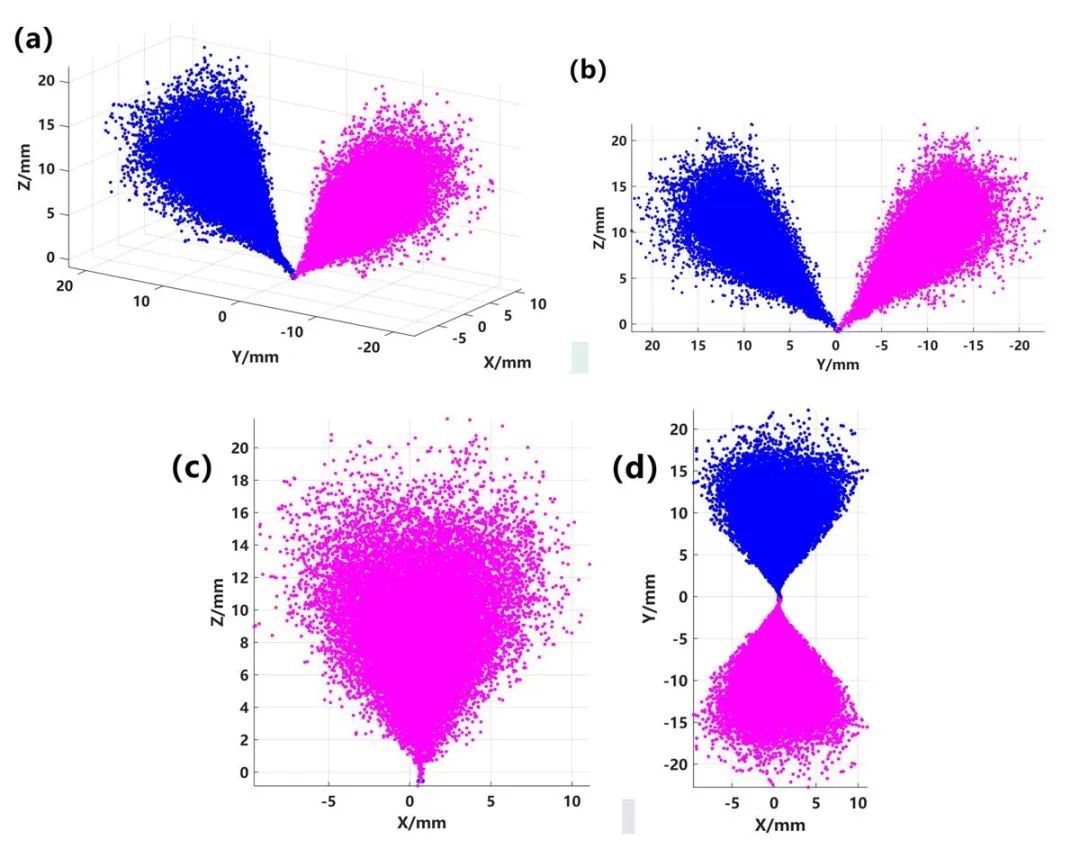
图 4. 眼科手术(第一)和吻合手术(第二)工作空间的多种视图。
我们还进行了模拟,追踪末端执行器的运动和轨迹,以确认设计满足眼球表面弧形运动的手术要求(图 5)。
 图 5. Simscape Multibody模拟显示了末端执行器沿弧线的运动。
图 5. Simscape Multibody模拟显示了末端执行器沿弧线的运动。
基于模型的方法的主要优势
在我们的研究中,我们发现所采用的基于模型的方法有几个关键优势。其中最有价值的是能够快速迭代设计,以确保它在转移到物理实现之前在数字领域完全发挥作用。在纸上或 CAD 软件中创建设计并知道它在理论上应该可行是一回事,但是,当我们通过 Simulink 和 Simscape 的模拟看到它在虚拟环境中工作时,我们会顺理成章的获得进一步的理解,从而改进它。
基于模型的方法可以获得数字模型,我们可以利用 3D 打印技术结合仿真分析对机器人机构进行快速成型,从而进一步缩短开发周期。基于模型的方法设计的硬件测试表明,原型成功地将 RCM 点维持在患者眼睛上(图 6)。
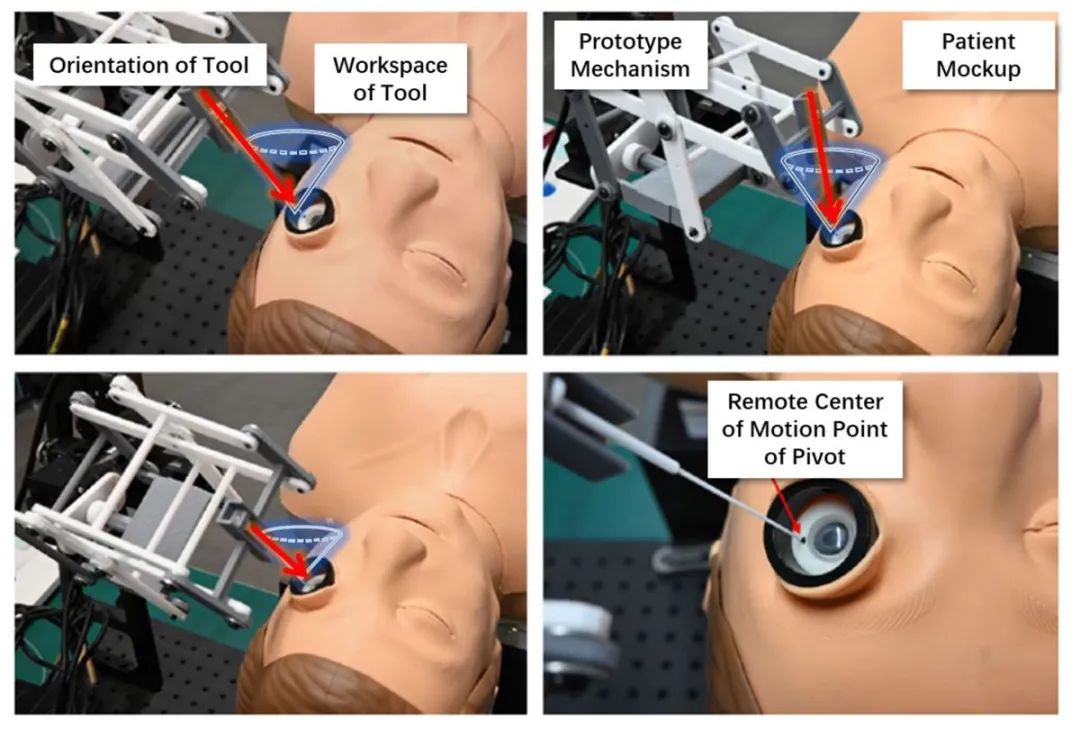
图 6. 基于模型的方法所得到的设计的硬件测试保持了眼图上的 RCM 点。
此外,使用 Simulink 和 Simscape 工作使我们团队中的许多学生能够更轻松地跟上进度并协调他们的工作。学生在毕业前会从一个项目转到另一个项目,基于模型的方法可以帮助他们将自己所做的工作传递给其他人。模型更容易解释和理解,因此当下一组人想要扩展或概括前一个团队的工作时,他们知道从哪里开始以及做什么。
最后,既然我们已经证明了机械设计的可行性,我们就可以开始开发控制系统,并在开发过程中进一步优化结构。使用 MATLAB 和 Simulink 进行基于模型的设计将有助于这两项工作,使我们能够通过模拟验证整个系统的安全性并缩短整个开发周期。
关于作者
杨量景博士现为浙江大学 ZJU-UIUC 学院助理教授。他的研究兴趣包括机器人、计算机视觉和视觉引导微操作。
-
机器人
+关注
关注
212文章
28888浏览量
209514 -
Simulink
+关注
关注
22文章
536浏览量
62946 -
模型
+关注
关注
1文章
3406浏览量
49457 -
手术机器人
+关注
关注
2文章
131浏览量
15973
原文标题:浙江大学 × MATLAB | 应用基于模型的方法开发显微手术机器人
文章出处:【微信号:MATLAB,微信公众号:MATLAB】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
大模型加持手术机器人,脑科手术取得突破!
《机器人设计与实现》——低成本DIY机器人,一本机器人制作的经典入门书
国外手术机器人新技术开发情况
全国首例!西安女子接受机器人牙科手术
全球首例骨科手术机器人5G远程手术成功完成产生了多大的影响?
刚柔软机器人设计与仿真分析实例解析
机器人设计教程之基于“创意之星”的机器人设计资料说明





 工商网监
工商网监
评论