 深度解析PID
深度解析PID
很多同学都不清楚PID是个什么东西,因为很多不是自动化的学生。他们开口就要资料,要程序。这是明显的学习方法不对,起码,首先,你要理解PID是个什么东西。
首先,为什么要做PID?
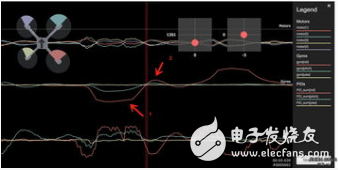
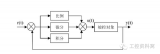
由于外界原因,小车的实际速度有时不稳定,这是其一,要让小车以最快的时间达达到既定的目标速度,这是其二。速度控制系统是闭环,才能满足整个系统的稳定要求,必竟速度是系统参数之一,这是其三.小车调速肯定不是线性的,外界因素那么多,没人能证明是线性的。如果是线性的,直接用P就可以了。比如在PWM=60%时,速度是2M/S,那么你要它3M/S,就把PWM提高到90%。因为90/60=3/2,这样一来太完美了。完美是不可能的。那么不是线性的,要怎么怎么控制PWM使速度达到即定的速度呢?即要快,又要准,又要狠。(即快准狠)系统这个速度的调整过程就必须通过某个算法调整,一般PID就是这个所用的算法。可能你会想到,如果通过编码器测得现在的速度是2.0m/s,要达到2.3m/s的速度,那么我把pwm增大一点不就行了吗?是的,增大pwm多少呢?必须要通过算法,因为PWM和速度是个什么关系,对于整个系统来说,谁也不知道。要一点一点的试,加个1%,不够,再加1%还是不够,那么第三次你还会加1%吗?很有可能就加2%了。通过PID三个参数得到一个表达式:△PWM=a *△V1+b *△V2+c *△V3,a b c是通过PID的那个长长的公式展开,然后约简后的数字,△V1 ,△V2 ,△V3 此前第一次调整后的速度差 ,第二次调整后的速度差,第三次。。。。。一句话,PID要使当前速度达到目标速度最快,需要建立如何调整pwm和速度之间的关系。
输入输出是什么输入就是前次速度,前前次速度,前前前次速度。输出就是你的PWM应该增加或减小多少。
控制模型:你控制一个人让他以PID控制的方式走110步后停下。
(1)P比例控制,就是让他走110步,他按照一定的步伐走到一百零几步(如108步)或100多步(如112步)就停了。
说明P比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
(2)PI积分控制,就是他按照一定的步伐走到112步然后回头接着走,走到108步位置时,然后又回头向110步位置走。在110步位置处来回晃几次,最后停在110步的位置。
说明在积分I控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
(3)PD微分控制,就是他按照一定的步伐走到一百零几步后,再慢慢地向110步的位置靠近,如果最后能精确停在110步的位置,就是无静差控制;如果停在110步附近(如109步或111步位置),就是有静差控制。
说明在微分控制D中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳,其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入“比例P”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势。这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例P+微分D(PD)控制器能改善系统在调节过程中的动态特性。
-
PID
+关注
关注
36文章
1473浏览量
85983
原文标题:用大白话告诉你什么是PID
文章出处:【微信号:weixin21ic,微信公众号:21ic电子网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Zstack中串口操作的深度解析(一)
java经典面试题深度解析
功能安全---AUTOSAR架构深度解析 精选资料分享
AUTOSAR架构深度解析 精选资料分享
深度解析PID调节经验
深度解析Asp.Net2.0中的Callback机制






 工商网监
工商网监
评论