 石英晶体谐振器和振荡器 频率控制和定时应用教程(之一)
石英晶体谐振器和振荡器 频率控制和定时应用教程(之一)
石英晶体的电子学应用
| “军事与航空航天 通信 导航 IFF 雷达 传感器 制导系统 引信 电子战 索诺布伊斯” | 工业 通信 电信 移动/蜂窝/便携式 无线电、电话和寻呼机 航空 海洋 导航 仪器仪表 计算机 数字系统 CRT显示器 磁盘驱动器 调制解调器 标签/标识 公用事业 传感器” | 消费者 钟表 蜂窝和无绳 电话、寻呼机 收音机和高保真音响设备 电视和有线电视 个人电脑 数码相机 摄像机/录像机 CB和业余无线电 玩具和游戏 起搏器 其他医疗器械 其他数字设备” |
| “研究与计量 原子钟 仪器仪表 天文学与大地测量学 空间跟踪 天文导航” | ||
| “汽车 发动机控制、立体声、, 偏航稳定性时钟 行车电脑控制 GPS” |
频率控制设备市场
(估计数,截至2006年)
Technology | Units per year | Unit price, typical | Worldwide market , $/ year |
Quartz Crystal Resonators & Oscillators | 3 x109 | ~$1 ($0.1 to3,000) | ~$4B |
Atomic Frequency Standards (seechapter6) | |||
Hydrogenmaser | ~20 | $100,000 | $2M |
Cesiumbeam frequency standard | ~500 | $50,000 | $25M |
Rubidiumcell frequency standard | ~50,000 | $2,000 | $100M |
导航
精确的时间对于精确的导航至关重要。从历史上看,导航一直是人类寻找更好时钟的主要动力。即使在古代,一个可以通过观测恒星的位置来测量纬度。然而,为了确定经度,问题变成了时间问题。由于地球在24小时内自转一周,因此可以从当地时间(根据太阳位置确定)和格林尼治时间之间的时差来确定经度子午线(由时钟决定):
经度(度)=(360度/24小时)x t(小时)。
1714年,英国政府向第一位
一个人制作一个时钟,在六周的航行结束时,可以确定船只的经度为30海里(即时钟精度为3每天几秒钟)。1735年,英国人约翰·哈里森凭借他的天文钟发明赢得了比赛。
今天的电子导航系统仍然需要更高的精度。As电磁波每微秒传播300米,例如,如果船只的计时误差为1毫秒,将导致300公里的导航误差。在全球定位系统(GPS)中,卫星中的原子钟和接收器中的石英振荡器提供纳秒级的精度。结果(全球)导航精度约为10米(有关GPS的更多详细信息,请参阅第8章)。
商业双向电台
从历史上看,随着商用双向无线电的用户数量已经增长,通道间距变窄,甚至更高-必须分配频谱以适应需求。更窄的信道间隔和更高的工作频率要求发射机和接收机都有更严格的频率容差。1940年,当时只有几千个商业广播在使用变送器时,500ppm的公差就足够了。如今,数以百万计的蜂窝电话(工作在800MHz以上的频带)中的振荡器必须保持2.5ppm或更高的频率容限。896-901 MHz和935-940 MHz移动无线电频带要求基站的频率容限为0.1 ppm,移动站的频率容限时为1.5 ppm。
容纳更多用户的需求将继续要求越来越高的频率精度。例如,美国国家航空航天局的个人卫星通信系统概念将使用对讲机,如手持终端、30GHz上行链路、20GHz下行链路和10kHz信道间隔。终端的频率精度要求是108中的几个部分.
数字网络同步
•同步在数字电信系统中起着至关重要的作用。它确保在最小的缓冲区溢出或下溢事件下执行信息传输,即在可接受的“滑动”水平下。滑动会导致问题,例如传真传输中的线路缺失、语音传输中的点击、安全语音传输中加密密钥的丢失以及数据重传。
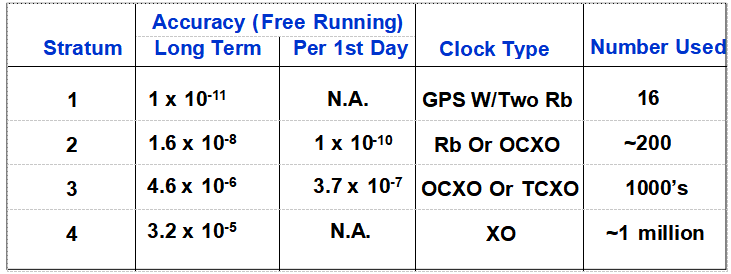
•例如,在AT&T的网络中,定时是按节点层次分布的。在包含时钟的成对节点之间建立定时源-接收器关系。时钟有四种类型,分为四个“层次”
PLL和PSK系统中的相位噪声
当使用相移键控(PSK)数字调制时,振荡器的相位噪声会导致对相变的错误检测,即比特误差。例如,在数字通信中,使用8相PSK时,最大相位容差为±22.5o,其中±7.5o是典型的允许载波噪声贡献。由于相位偏差的统计性质,例如,如果RMS相位偏差为1.5o,则超过±7.5o相位偏差的概率为6 X 10-7,这在某些应用中可能会导致显著的误码率。
即使在“低噪声”振荡器中,冲击和振动也会产生较大的相位偏差。此外,当振荡器的频率乘以N时,相位偏差也乘以N例如,10MHz下10-3弧度的相位偏差在10GHz下变为1弧度。如此大的相位偏移可能会对系统的性能,例如依赖于锁相环(PLL)或相移键控(PSK)的系统的性能。低噪声、加速度不敏感的振荡器在此类应用中至关重要。
晶体振荡器
振荡
•在振荡频率下,闭环相移=2nπ。
•初始通电时,电路中唯一的信号是噪音。频率满足振荡相位条件的噪声分量以增加的幅度在环路周围传播。比率增长取决于过剩;即小信号、环路增益和网络中晶体的带宽。
•振幅继续增加,直到放大器增益因有源元件的非线性(“自限”)或某些自动电平控制而降低。
•在稳态下,闭环增益=1。
振荡和稳定性
•如果发生相位扰动Δφ,频率必须偏移Δf以保持2nπ相位条件,其中串联谐振振荡器的Δf/f=-Δφ/2QL,QL是网络中晶体的负载Q。“相位斜率”dφ/df与串联谐振频率附近的QL成正比(另见第3章中的“等效电路”和“频率与电抗”)。
•大多数振荡器在“并联谐振”下工作,其中电抗与频率斜率dX/df,即“刚度”,与晶体单元的动电容C1成反比。
•相位(或电抗)的最大频率稳定性
在振荡器回路中的扰动下,相位斜率(或电抗斜率)必须最大,即C1应最小,QL应最大。Aquartz晶体单元的高Q值和高刚度使其成为振荡器中的主要频率(和频率稳定性)决定元件。
可调性和稳定性
使振荡器在宽频率范围内可调会降低其稳定性,因为使振荡器容易受到有意调谐的影响,也会使其容易受到导致无意调谐的因素的影响。调谐范围越宽,保持高稳定性就越困难。例如,如果OCXO被设计为在某个平均时间内具有1 x 10-12的短期稳定性和1 x 10-7的可调性,那么晶体的负载电抗在该平均时间内必须稳定到1 x 10-5。实现这种稳定性是困难的,因为负载电抗受到杂散电容和电感、变容二极管电容与电压特性的稳定性以及变容二极管上电压稳定性的影响。此外,1 x 10-5负载电抗稳定性不仅必须在良性条件下保持,而且必须在不断变化的环境条件下(温度、振动、辐射等)保持。
尽管高稳定性、烤箱化的10 MHz压控振荡器可能具有5 x 10-7的频率调节范围和每年2 x 10-8的增益率,但宽调谐范围的10 MHz VCXO可能具有50 ppm的调谐范围和每年2ppm的老化率。
振荡器缩略语
最常用的:
•XO…………晶体振荡器
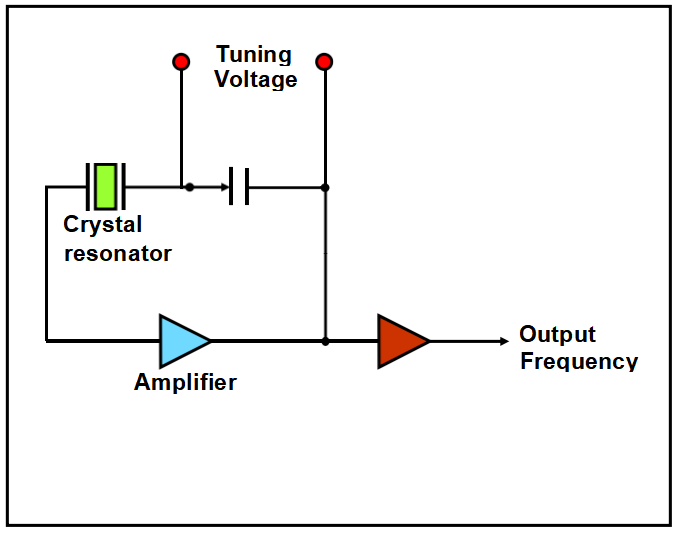
•VCXO……压控晶体振荡器
•OCXO…….恒温晶体振荡器
•TCXO…….温度补偿晶体振荡器
其他:
•TCVCXO…温度补偿/压控晶体振荡器
•OCVCXO…炉控/压控晶体振荡器
•MCXO…….微机补偿晶体振荡器
•RbXO………铷晶体振荡器
晶体振荡器分类
根据处理晶体单元频率与温度(f与T)特性的方法,有三类:
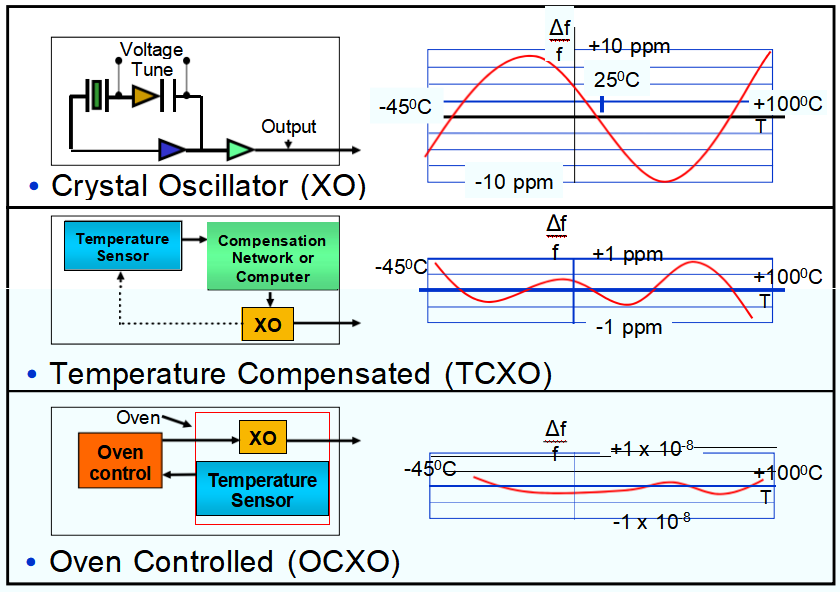
•XO,晶体振荡器,不包含降低晶体f与T特性的方法(也称为PXO封装晶体振荡器)。
•TCXO,温度补偿晶体振荡器,其中,例如,温度传感器(如热敏电阻)的输出信号用于产生校正电压,该电压施加到晶体网络中的可变电抗(如变容二极管)上。电抗变化补偿了晶体的f对T特性。模拟TCXO可以比晶体的f与T变化提高约20倍。
•OCXO,炉控晶体振荡器,其中晶体和其他温度敏感元件处于稳定的炉中,该炉被调节到晶体f与T斜率为零的温度。OCXO可以比晶体的f与T变化提高1000倍以上。
晶体振荡器分类
振荡器的层次结构
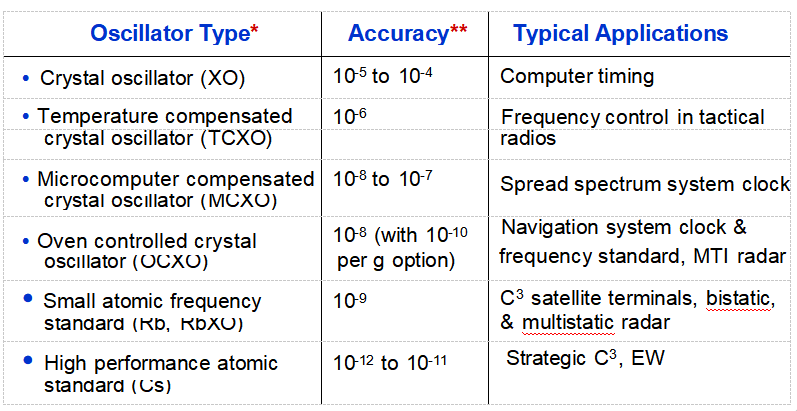
*尺寸范围从时钟振荡器的<1cm3到Cs标准的>30升。成本范围从时钟振子的<1美元到Cs标准中的>50000美元。
**包括环境影响(例如-40℃至+75℃)和一年的老化。
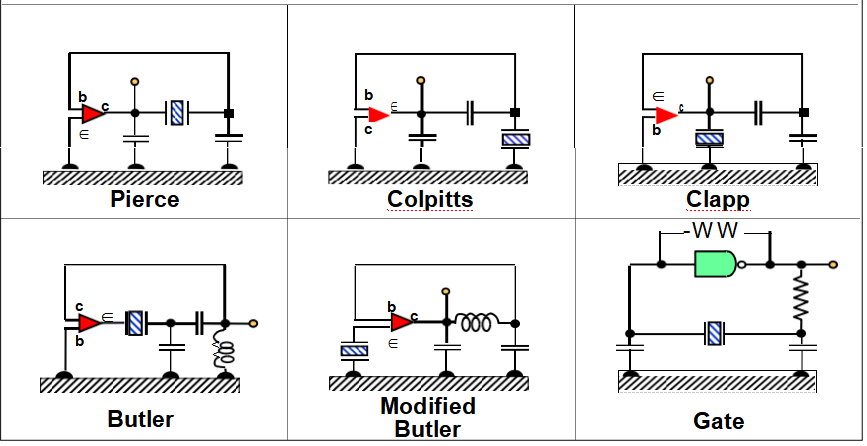
振荡器电路类型
在众多振荡器电路类型中,Pierce、Colpitts和Clapp这三种更常见的振荡器电路类型由同一电路组成,只是射频接地点不同。巴特勒和改良版巴特勒也很相似;在每种情况下,发射极电流都是晶体
电流。门振荡器是皮尔斯型,它使用逻辑门加上电阻器来代替皮尔斯振荡器中的晶体管。(一些门振荡器使用多个门)。
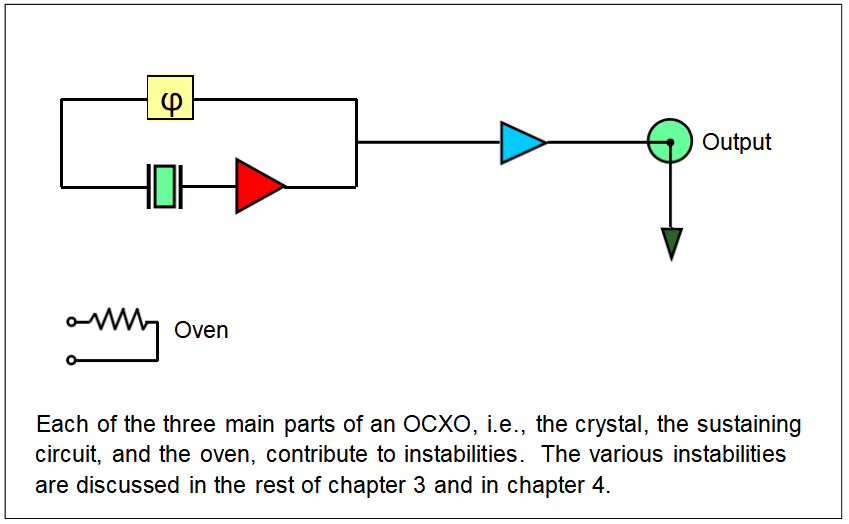
OCXO框图
-
振荡器
+关注
关注
28文章
3811浏览量
138859 -
石英晶体
+关注
关注
0文章
169浏览量
38533 -
导航
+关注
关注
7文章
521浏览量
42370 -
石英晶体谐振器
+关注
关注
0文章
23浏览量
2781
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论