 基于PPC、PLC及现场总线的铁路大型养路机械电气控制系统
基于PPC、PLC及现场总线的铁路大型养路机械电气控制系统
可编程逻辑控制器(PLC—Programmable Logic Controller),简称可编程控制器,它是以微处理器为基础,综合了计算机技术、通讯技术和自动控制技术发展而来的一种新型工业控制装置。它问世于20世纪60年代,到现在仍保持旺盛的发展势头。它具有体积小、功能丰富、配置灵活、适应恶劣环境、抗干扰性强、可靠性高、编程方便、价格便宜等优点,广泛用于电力、机械、冶金、化工、轻纺等各个工业过程自动控制中。它不仅可以取代传统的继电器控制系统,还可构成复杂的过程控制网络。
现场总线技术是20世纪80年代后期发展起来的,它是目前自动化领域中的一个热点,是新一代控制系统的发展方向,它综合了数字通信技术、计算机技术、自动控制技术、网络技术和智能仪表等多种技术手段,从根本上突破了传统的“点对点”式的模拟信号或数字—模拟信号控制的局限性,构成一种全分散、全数字化、多变量、多节点的通信与控制系统。现场总线则是连接现场智能设备和自动化控制设备的数字式、双向传输、多分支结构的通信网络,其基础是数字智能现场装置。分散在各个现场的数字智能现场装置通过现场总线连为一体,并与控制室
中的控制器和监视器一起构成现场总线控制系统(FCS—Fieldbus Control System)。
现场总线技术实际上是采用串行数据传输和连接方式代替传统的并联信号传输和连接方式的方法,它依次实现了控制层和现场总线设备层之间的数据传输,同时在保证传输实时性的情况下实现信息的可靠性和开放性。一般的现场总线具有以下几个特点:(1)布线简单;(2)开放性;(3)实时性;(4)可靠性;(5)高效诊断;(6)硬件灵活。
目前,国际上各种各样的现场总线有很多种,统一的国际标准尚未建立。其中有较强实力和影响的有:FF(Foundation Fieldbus基金会现场总线)、HART(Highway Addressable Remote Transducer)、CAN(Controller Area Network控制器局域网)、Profibus(Process Field Bus过程现场总线)、INTERBUS、LonWorks(Local Operating Network局部操作网络)、WorldFIP、MODBus、DeviceNet、ControlNet、ASi(Actuator Sensor Interface执行器传感器接口)等。
基于PPC工业计算机、PLC及现场总线的电气控制系统在工业自动化领域,如冶金、电力、石化、矿山、水泥、水处理、乳品饮料、啤酒罐装、烟草加工、机械装配、产品包装等已得到广泛的应用,但是在铁路大型养路机械电气控制系统中还没有广泛应用。本文根据铁路大型养路机械控制系统的特点,提出一种基于PPC工业计算机、PLC及INTERBUS现场总线的铁路大型养路机械电气控制系统的设计方案。
2现状
养路机械化是实现铁路维修养护现代化、保证铁路不间断运输和行车安全的重要技术手段。为适应铁路快速、重载以及轨道结构重型化的技术发展要求,发达国家铁路相继采用大型养路机械进行铁路线路维护,到上世纪80年代末,已基本形成以大型养路机械为主要作业手段的格局。而此时,我国还在依靠手工、小型机械和非标准自制设备进行线路维护,作业质量差、效率低,特别是在繁忙干线,线路维护与运营的矛盾尤其突出。
上世纪80年代初期,我国从奥地利普拉塞—陶依尔公司引进了先进的大型养路机械制造技术,确立了大型养路机械的发展采取“技术引进—消化、吸收—国产化生产—开发、创新”的途径。通过20多年的引进技术和国产化生产,我们学习了国外大型养路机械的先进技术,更新了传统的设计观念,拓宽了开发思路,增强了开发具有自主知识产权产品的能力。
随着铁路的跨越式发展和市场竞争的加剧,加快推进大型养路机械引进、消化、吸收国外先进技术的进程,加快具有自主知识产权产品的研发,加快新产品开发速度,发展核心技术,创新和超越已经成为现阶段工作的重中之重,已经刻不容缓。
铁路大型养路机械是集机械、液压、气动、电气、计算机、激光等技术于一体的铁路专用机械。按功能分有以下系列:清筛机、捣固车、配碴车、稳定车、钢轨打磨车、钢轨探伤车、轨道检测车、架线车、焊轨车、道岔铺换机组等。对于不同功能的铁路大型养路机械电气控制系统来说,其本质的区别在于作业监视控制系统。到目前为止,我国的清筛机、捣固车、配碴车、稳定车等铁路大型养路机械的技术主要是在引进、消化吸收奥地利普拉塞—陶依尔公司铁路大型养路机械技术的基础上发展起来的,它属于模拟集中式控制系统,它主要由以下子系统组成:
(1)整车电源子系统;(2)柴油机监视控制子系统;(3)高速走行监视控制子系统;(4)作业监视控制子系统;(5)辅助设备子系统:包括照明、通话、取暖及空调等。
其中作业监视控制子系统是各类铁路大型养路机械电气控制系统的核心,它完成作业机构状态的监视、完成作业机构动作的控制。不同功能的铁路大型养路机械,其作业监视控制系统的复杂程度有着很大的差别。如清筛机和配碴车,它的作业监视控制系统比较简单。而捣固车、稳定车、钢轨打磨车、钢轨探伤车、轨道检测车、架线车等,它们的作业监视控制子系统就比较复杂。下面以稳定车的作业监视控制子系统为例作一介绍,它由以下部分组成:
(1)计算机控制部分:由上位机控制板、键盘、显示器构成;(2)程序控制部分:由下位机控制板、I/O板、功率输出板组成的微机系统构成;(3)模拟量控制部:由A/D转换板、D/A转换板、频率测量板、各种功能的模拟控制板构成;(4)测量部分:由左、右抄平传感器,加速度传感器,振频传感器等构成;(5)轨道参数记录部分:由记录仪、前、后电子摆,正矢传感器,测量轮等构成。
普拉塞—陶依尔公司的模拟集中式控制系统的特点如下:
(1)各子系统的监视部分都使用模拟仪表或数字显示器或指示及报警灯;(2)功能复杂
机型作业监视控制子系统的控制部分都使用插装式模拟电路板和由插装式电路板组成的微机系统;(3)作业监视控制子系统中各I/O信号的接线方式均为“终端(开关、传感器/电磁阀、继电器)—作业主控制柜”或“终端元件(开关、传感器/电磁阀、继电器)—中间过渡箱—多芯电缆—作业主控制柜”的传统接线方式(如图1);(4)轨道参数记录系统为一个独立的系统,与微机及计算机系统没有通讯和数据交换。
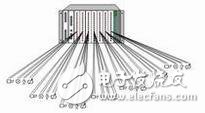
图1:传统的接线方式
普拉塞—陶依尔公司的模拟集中式控制系统存在以下不足:
(1)监视仪表、指示及报警灯安装位置分散;模拟仪表信号仅用作显示而未进入过程控制;(2)插装式电路板的抗振性能、抗冲击性能、防尘性能均不好;模拟电路板的调整(如校“0”、标定)由多个电位器来完成,比较复杂;控制系统中采用模拟量对传输及控制信号进行转换、传递,其精度差、受干扰信号影响大,因而整个控制系统的控制效果及系统稳定性都较差;(3)集中控制模式使得作业主控制柜体积较大;I/O信号传统的接线方式,使作业主控制柜中有大量连接电缆,使断点和接点增加而增加故障点,使检修和维护变得复杂。
3系统要求
针对上面列举的不足,有必要设计一种新的电气控制系统,它应满足以下要求。
3.1基本要求
新的大型养路机械电气控制系统应具有统一的显示、指示及报警,具有过程控制功能;具有较高的可靠性和稳定性,具有较好的抗振性能、抗冲击性能、防尘性能,能经受高温、高湿的环境。
3.2具体要求
新的铁路大型养路机械电气控制系统主要针对柴油机监视控制子系统、高速走行监视控制子系统、作业监视控制子系统进行重新设计,而对于整车电源子系统和辅助设备子系统,它们都是点对点的简单控制,不作重新设计。下面详细介绍这三个子系统的各种输入输出信号。
3.2.1柴油机监视控制子系统
3.2.1.1柴油机监视部分
输入DI信号:油压开关信号、缸盖温度(水温)开关信号、空气滤清器开关信号、直流发电机发电状态开关信号等;输入AI信号:转速传感器信号、油压传感器信号、缸盖温度(水温)传感器信号、电瓶电压信号、柴油油位传感器信号等;输出DO信号:预热指示信号等;
3.2.1.2柴油机控制部分
输入DI信号:怠速位感应开关信号、高速走行位感应开关信号、作业位感应开关信号等。
输出DO信号:油门电机驱动信号等;
3.2.2高速走行监视控制子系统(静液压传动模式)
3.2.2.1高速走行监视部分
输入DI信号:各轴挂、脱挡感应开关信号等;输入AI信号:速度—里程传感器信号等;
-
控制系统
+关注
关注
41文章
6671浏览量
110977
发布评论请先 登录
相关推荐
锅炉车间输煤机组PLC电气控制系统设计
卷烟机PLC电气控制系统设计
PLC和MENTORⅡ设计的智能钳型吊电气控制系统
采用软PLC的铣刨机电气控制系统设计
CA6140车床电气控制系统分析








 工商网监
工商网监
评论